【 MATLAB 】 LLS algorithm Simulation of TOA - Based Positioning

【摘要】 博文:【 LLS 】Linear Approaches of TOA - Based Positioning
讲解了LLS的TOA定位算法的原理,这里给出MATLAB仿真。
仿真的条件与之前讲解非线性算法之牛顿——拉夫森算法时候的仿真条件一致。从下面的定位示意图中也能看出来,测量站的位置以及个数,以及目标位置。
测量站的位置:x1 = [0,0];x2 = [0,10]...
博文:【 LLS 】Linear Approaches of TOA - Based Positioning
讲解了LLS的TOA定位算法的原理,这里给出MATLAB仿真。
仿真的条件与之前讲解非线性算法之牛顿——拉夫森算法时候的仿真条件一致。从下面的定位示意图中也能看出来,测量站的位置以及个数,以及目标位置。
测量站的位置:x1 = [0,0];x2 = [0,10];x3 = [10,0];x4 = [10,10];
目标的真实位置:x=[2,3].
信噪比正常定义,设定为30dB,从下图的定位示意图中可以看出,基本可以定位,因为估计出来的目标位置与目标真实位置基本重合,但存在一定的误差。这就要求我们去分析误差,看看什么样的误差我们能够接受,对应的信噪比是多少?

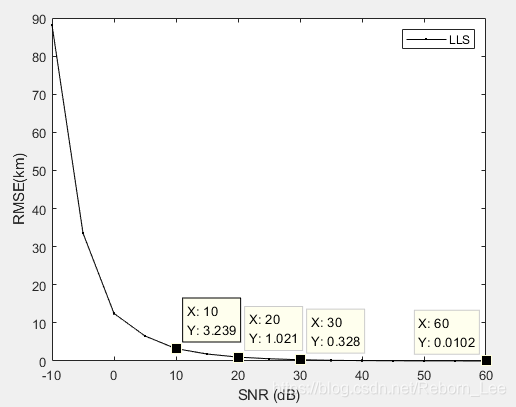
从下图的定位误差分析图中可以看出,信噪比为20dB时候的定位误差达到了1km之多,信噪比为30dB时候的定位误差为328m,这与之前的非线性方法相比,定位误差就大了一些,当然我们也能理解,毕竟做了一些线性近似嘛。
定位示意图代码和误差分析代码略。
下面只给出lls算法的代码:
当然,这些程序中都可以主动调用lls算法,可以将lls算法写成一个函数,供调用:
-
function x = lls(X,r)
-
% LLS algorithm
-
% --------------------------------
-
% x = lls(X,r);
-
% x = 2D position estimate
-
% X = receiver position matrix
-
% r = TOA measurement vector
-
%
-
L = size(X,2); % number of receivers
-
A = [-2*X' ones(L,1)];
-
b = r.^2-sum(X'.^2,2);
-
p = pinv(A'*A)*A'*b;
-
x= [p(1) ; p(2)];
-
-
为什么这么写,原理参见开头推荐的博文。
文章来源: reborn.blog.csdn.net,作者:李锐博恩,版权归原作者所有,如需转载,请联系作者。
原文链接:reborn.blog.csdn.net/article/details/84146976

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)