
个人介绍
喜欢数据分析,热爱人工智能
感兴趣或擅长的领域
人工智能
个人勋章
-
 万人瞩目
万人瞩目
-
 活跃之星
活跃之星
成长雷达
275
228
0
15
42
达成规则
全部时间
全部时间
最近三天
最近一周
最近一月
- 全部
- 暂无专栏分类
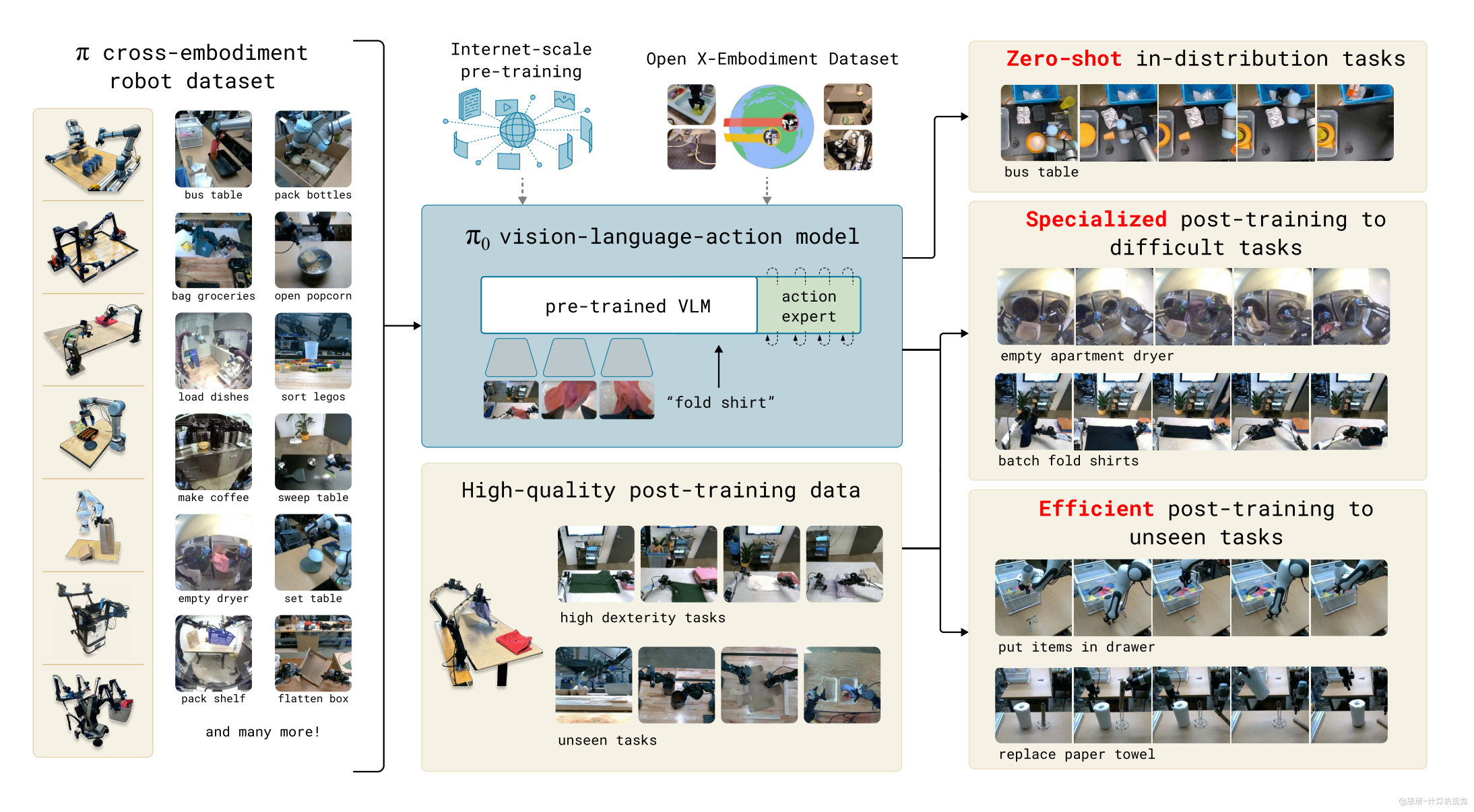
本文介绍了Pi0云端推理部署的完整流程。首先配置好服务器端环境并启动策略服务,然后在客户端安装所需依赖并连接机械臂与摄像头。实测下来,即使对于没见过的云宝机械臂的抓取放置成功率也能达到100%,体现了模型强大的泛化能力!
 362
362
 0
0
 0
0
2025-11-09 16:38:31
本文介绍了在H20实例上安装和训练Pi0模型的完整流程,包括环境配置、数据转换、修改训练配置以及模型训练等关键步骤,并提供了相关命令和注意事项,帮助读者快速上手Pi0模型训练。
391
0
0
2025-11-09 13:21:36




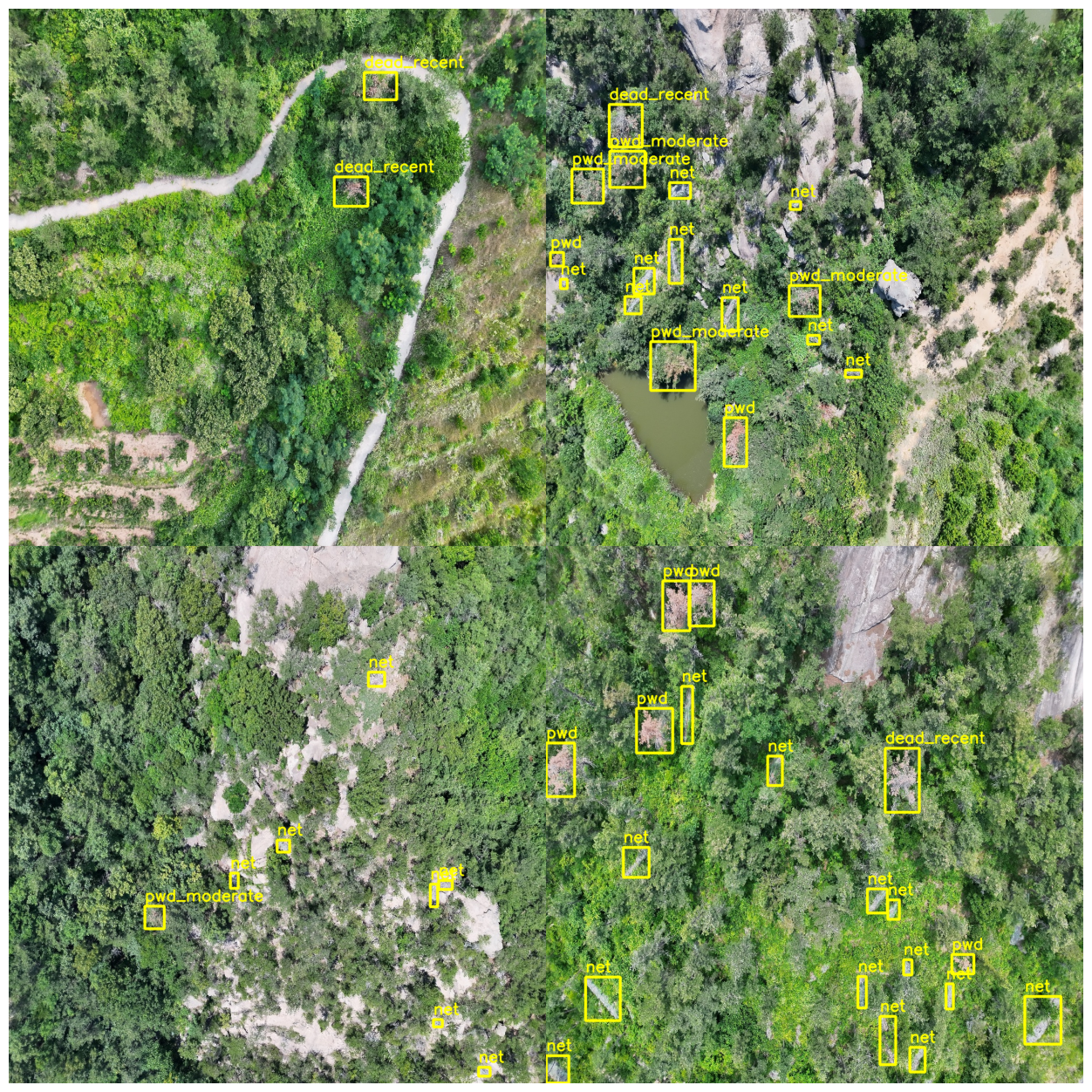
本文详细阐述了在OrangePi AI Studio Pro上基于昇腾310P使用MindYolo框架实现YOLOv8模型训练与验证的完整流程,涵盖环境准备、数据集格式转换、模型训练参数配置及性能评估。
999+
0
0
2025-10-24 14:51:53
上滑加载中