Pi0☁云端推理部署

【摘要】 本文介绍了Pi0云端推理部署的完整流程。首先配置好服务器端环境并启动策略服务,然后在客户端安装所需依赖并连接机械臂与摄像头。实测下来,即使对于没见过的云宝机械臂的抓取放置成功率也能达到100%,体现了模型强大的泛化能力!
Pi0☁云端推理部署
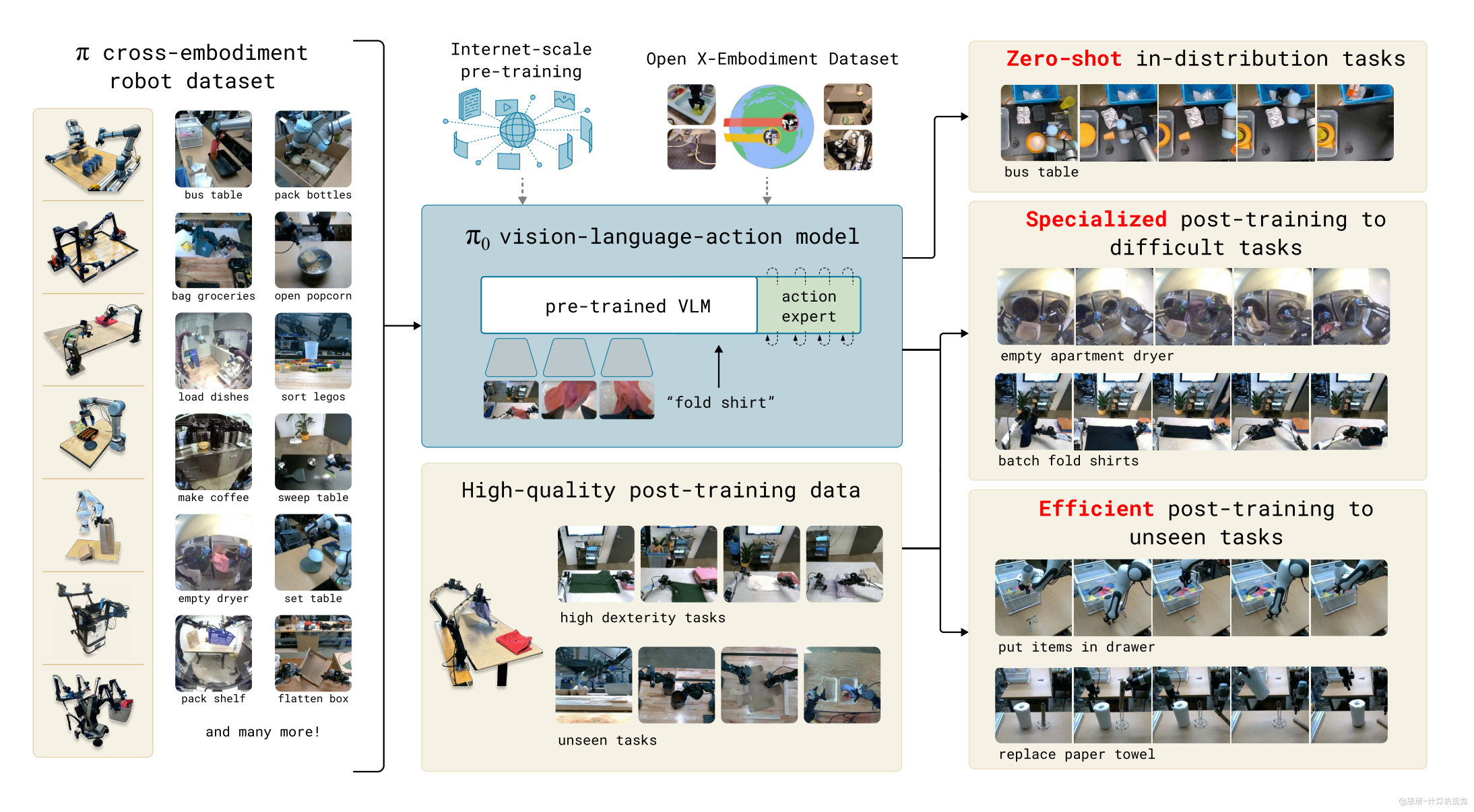
Pi0 是一个通用机器人策略基础模型,专为解决机器人学习中的数据稀缺、泛化能力差和鲁棒性不足等核心挑战而设计。借鉴大语言模型的训练方法,Pi0 通过大规模预训练掌握广泛的机器人操作技能,并能通过微调快速适应具体任务需求。该模型支持高效的数据利用与快速部署,在有限数据下也能实现良好性能,为机器人智能化提供了一种可扩展的解决方案。
1. 环境配置
在之前LeRobot安装及使用教程和Pi0 模型训练的基础上,Pi0的推理也建议使用云端部署的方式运行。
a. 我租赁的服务器是H20,在服务端(openpi环境)中运行:
cd /root/autodl-tmp/openpi_episode1_student
uv run scripts/serve_policy.py policy:checkpoint --policy.config=enpei_robot_demo_move_toy_low_mem_finetune --policy.dir=checkpoints/enpei_robot_demo_move_toy_low_mem_finetune/my_experiment/9999
启动服务器后,他会暴露一个服务端口(默认是 6006):
warning: The `tool.uv.dev-dependencies` field (used in `packages/openpi-client/pyproject.toml`) is deprecated and will be removed in a future release; use `dependency-groups.dev` instead
INFO:root:Loading model...
INFO:2025-11-09 14:40:27,523:jax._src.xla_bridge:925: Unable to initialize backend 'rocm': module 'jaxlib.xla_extension' has no attribute 'GpuAllocatorConfig'
INFO:jax._src.xla_bridge:Unable to initialize backend 'rocm': module 'jaxlib.xla_extension' has no attribute 'GpuAllocatorConfig'
INFO:2025-11-09 14:40:27,524:jax._src.xla_bridge:925: Unable to initialize backend 'tpu': INTERNAL: Failed to open libtpu.so: libtpu.so: cannot open shared object file: No such file or directory
INFO:jax._src.xla_bridge:Unable to initialize backend 'tpu': INTERNAL: Failed to open libtpu.so: libtpu.so: cannot open shared object file: No such file or directory
INFO:absl:orbax-checkpoint version: 0.11.13
INFO:absl:Created BasePyTreeCheckpointHandler: use_ocdbt=True, use_zarr3=False, pytree_metadata_options=PyTreeMetadataOptions(support_rich_types=False), array_metadata_store=<orbax.checkpoint._src.metadata.array_metadata_store.Store object at 0x7f78fd908250>
INFO:absl:Restoring checkpoint from /root/autodl-tmp/openpi_episode1_student/checkpoints/enpei_robot_demo_move_toy_low_mem_finetune/my_experiment/9999/params.
INFO:absl:[thread=MainThread] Failed to get flag value for EXPERIMENTAL_ORBAX_USE_DISTRIBUTED_PROCESS_ID.
INFO:absl:[process=0] /jax/checkpoint/read/bytes_per_sec: 1.1 GiB/s (total bytes: 6.1 GiB) (time elapsed: 5 seconds) (per-host)
INFO:absl:Finished restoring checkpoint in 5.72 seconds from /root/autodl-tmp/openpi_episode1_student/checkpoints/enpei_robot_demo_move_toy_low_mem_finetune/my_experiment/9999/params.
INFO:root:Loaded norm stats from /root/autodl-tmp/openpi_episode1_student/assets/enpei_robot_demo_move_toy_low_mem_finetune/hou/demo_move_toy_openpi
INFO:root:Loaded norm stats from /root/autodl-tmp/openpi_episode1_student/checkpoints/enpei_robot_demo_move_toy_low_mem_finetune/my_experiment/9999/assets/hou/demo_move_toy_openpi
INFO:root:Creating server (host: autodl-container-9af746813b-5ccfe20e, ip: 172.17.0.8)
INFO:websockets.server:server listening on 0.0.0.0:6006
INFO:websockets.server:connection open
INFO:openpi.serving.websocket_policy_server:Connection from ('127.0.0.1', 53688) opened
INFO:openpi.serving.websocket_policy_server:Connection from ('127.0.0.1', 53688) closed
INFO:websockets.server:connection open
INFO:openpi.serving.websocket_policy_server:Connection from ('127.0.0.1', 56818) opened
INFO:openpi.serving.websocket_policy_server:Connection from ('127.0.0.1', 56818) closed
在AutoDL中使用它的端口转发服务(自定义服务):

b. 在客户端(lerobot环境)进入Lerobot仓库代码,中安装openpi-client:
cd ./packages/openpi-client
pip install -e .
c. 启动机械臂进行归零,安装腕部相机和夹爪,查看相机ID:
(base) hou@hou-Ubuntu:~/workspace/lerobot_single_student$ conda activate lerobot
(lerobot) hou@hou-Ubuntu:~/workspace/lerobot_single_student$ python -m lerobot.episode_default_position --ip="localhost" --port=12345
INFO 2025-11-09 14:25:56 _position.py:33 Connected to EnpeiRobot controller at localhost:12345
INFO 2025-11-09 14:26:02 _position.py:46 Moving to default position, estimated time: 1.72s
INFO 2025-11-09 14:26:04 _position.py:50 Successfully moved to default position
(lerobot) hou@hou-Ubuntu:~/workspace/lerobot_single_student$ python -m lerobot.find_cameras opencv
--- Detected Cameras ---
Camera #0:
Name: OpenCV Camera @ /dev/video0
Type: OpenCV
Id: /dev/video0
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 480
Fps: 30.0
--------------------
Camera #1:
Name: OpenCV Camera @ /dev/video2
Type: OpenCV
Id: /dev/video2
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 480
Fps: 30.0
--------------------
Camera #2:
Name: OpenCV Camera @ /dev/video4
Type: OpenCV
Id: /dev/video4
Backend api: V4L2
Default stream profile:
Format: 0.0
Width: 640
Height: 480
Fps: 30.0
--------------------
Finalizing image saving...
Image capture finished. Images saved to outputs/captured_images
2. Pi0 推理
启动客户端,在终端中运行run.sh:
- host 服务器地址(这里因为用了 AutoDL 本地转发,所以是 localhost)
- port 服务器端口
- instruction 文本指令,保持和采集数据一致
- enpei_use_radian 需要使用弧度制
#!/bin/bash
python -m lerobot.test_openpi \
--robot.ip_address="localhost" \
--robot.port=12345 \
--robot.type=enpei_follower \
--robot.id=enpei_follower \
--robot.cameras="{ handeye: {type: opencv, index_or_path: 4, width: 320, height: 240, fps: 30}, fixed: {type: opencv, index_or_path: 0, width: 320, height: 240, fps: 30}}" \
--host=localhost \
--port=6006 \
--instruction="Put the toy to the white box" \
--fps=30 \
--enpei_use_radian=true
(lerobot) hou@hou-Ubuntu:~/workspace/lerobot_single_student$ ./run.sh
INFO 2025-11-09 14:48:58 nt_policy.py:30 Waiting for server at ws://localhost:6006...
Connected to remote policy server at localhost:6006
Server metadata: {}
Using instruction: Put the toy to the white box
设置enpei follower机器人角度单位: 弧度
INFO 2025-11-09 14:48:58 follower.py:134 Connected to EnpeiRobot controller
INFO 2025-11-09 14:49:03 a_opencv.py:176 OpenCVCamera(4) connected.
INFO 2025-11-09 14:49:05 a_opencv.py:176 OpenCVCamera(0) connected.
INFO 2025-11-09 14:49:05 follower.py:156 enpei_follower EnpeiFollower connected.
Robot connected successfully
运行策略,目标FPS: 30
推理线程启动
等待第一个动作生成...
wait for frame: 0.0018558219999249559
wait for frame: 0.0018982179999511573
Loop duration: 1.4765s, Real FPS: 0.68, Action FPS: 33.87, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4735s, Real FPS: 0.68, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4755s, Real FPS: 0.68, Action FPS: 33.89, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4973s, Real FPS: 0.67, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5040s, Real FPS: 0.66, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5590s, Real FPS: 0.64, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5400s, Real FPS: 0.65, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4911s, Real FPS: 0.67, Action FPS: 33.91, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4938s, Real FPS: 0.67, Action FPS: 33.94, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4853s, Real FPS: 0.67, Action FPS: 33.92, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4957s, Real FPS: 0.67, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4930s, Real FPS: 0.67, Action FPS: 33.94, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4914s, Real FPS: 0.67, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4878s, Real FPS: 0.67, Action FPS: 33.97, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4911s, Real FPS: 0.67, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4914s, Real FPS: 0.67, Action FPS: 33.94, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5189s, Real FPS: 0.66, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4915s, Real FPS: 0.67, Action FPS: 33.94, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5207s, Real FPS: 0.66, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.4865s, Real FPS: 0.67, Action FPS: 33.97, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5499s, Real FPS: 0.65, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.6458s, Real FPS: 0.61, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.6337s, Real FPS: 0.61, Action FPS: 33.98, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5200s, Real FPS: 0.66, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5218s, Real FPS: 0.66, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5184s, Real FPS: 0.66, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5273s, Real FPS: 0.65, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5247s, Real FPS: 0.66, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5285s, Real FPS: 0.65, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5576s, Real FPS: 0.64, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5193s, Real FPS: 0.66, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5519s, Real FPS: 0.64, Action FPS: 33.97, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5240s, Real FPS: 0.66, Action FPS: 33.94, Action count: 50, Action shape: (50, 7)
Loop duration: 1.6051s, Real FPS: 0.62, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5251s, Real FPS: 0.66, Action FPS: 33.92, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5533s, Real FPS: 0.64, Action FPS: 33.94, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5564s, Real FPS: 0.64, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5579s, Real FPS: 0.64, Action FPS: 33.92, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5550s, Real FPS: 0.64, Action FPS: 33.94, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5526s, Real FPS: 0.64, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5507s, Real FPS: 0.64, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5511s, Real FPS: 0.64, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5557s, Real FPS: 0.64, Action FPS: 33.92, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5514s, Real FPS: 0.64, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5539s, Real FPS: 0.64, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5573s, Real FPS: 0.64, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5767s, Real FPS: 0.63, Action FPS: 33.97, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5736s, Real FPS: 0.64, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5553s, Real FPS: 0.64, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5537s, Real FPS: 0.64, Action FPS: 33.97, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5514s, Real FPS: 0.64, Action FPS: 33.98, Action count: 50, Action shape: (50, 7)
Loop duration: 1.6261s, Real FPS: 0.61, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.6378s, Real FPS: 0.61, Action FPS: 33.94, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5520s, Real FPS: 0.64, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5588s, Real FPS: 0.64, Action FPS: 33.98, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5567s, Real FPS: 0.64, Action FPS: 33.97, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5534s, Real FPS: 0.64, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5481s, Real FPS: 0.65, Action FPS: 33.97, Action count: 50, Action shape: (50, 7)
Loop duration: 1.6520s, Real FPS: 0.61, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5514s, Real FPS: 0.64, Action FPS: 33.96, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5552s, Real FPS: 0.64, Action FPS: 33.95, Action count: 50, Action shape: (50, 7)
Loop duration: 1.5494s, Real FPS: 0.65, Action FPS: 33.93, Action count: 50, Action shape: (50, 7)
^C
Client stopped by user
推理线程结束
测试视频:

3. 小结
本文介绍了Pi0云端推理部署的完整流程。首先配置好服务器端环境并启动策略服务,然后在客户端安装所需依赖并连接机械臂与摄像头。实测下来,即使对于没见过的云宝机械臂的抓取放置成功率也能达到100%,体现了模型强大的泛化能力!

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)