Pi0 模型训练

【摘要】 本文介绍了在H20实例上安装和训练Pi0模型的完整流程,包括环境配置、数据转换、修改训练配置以及模型训练等关键步骤,并提供了相关命令和注意事项,帮助读者快速上手Pi0模型训练。
Pi0 模型训练
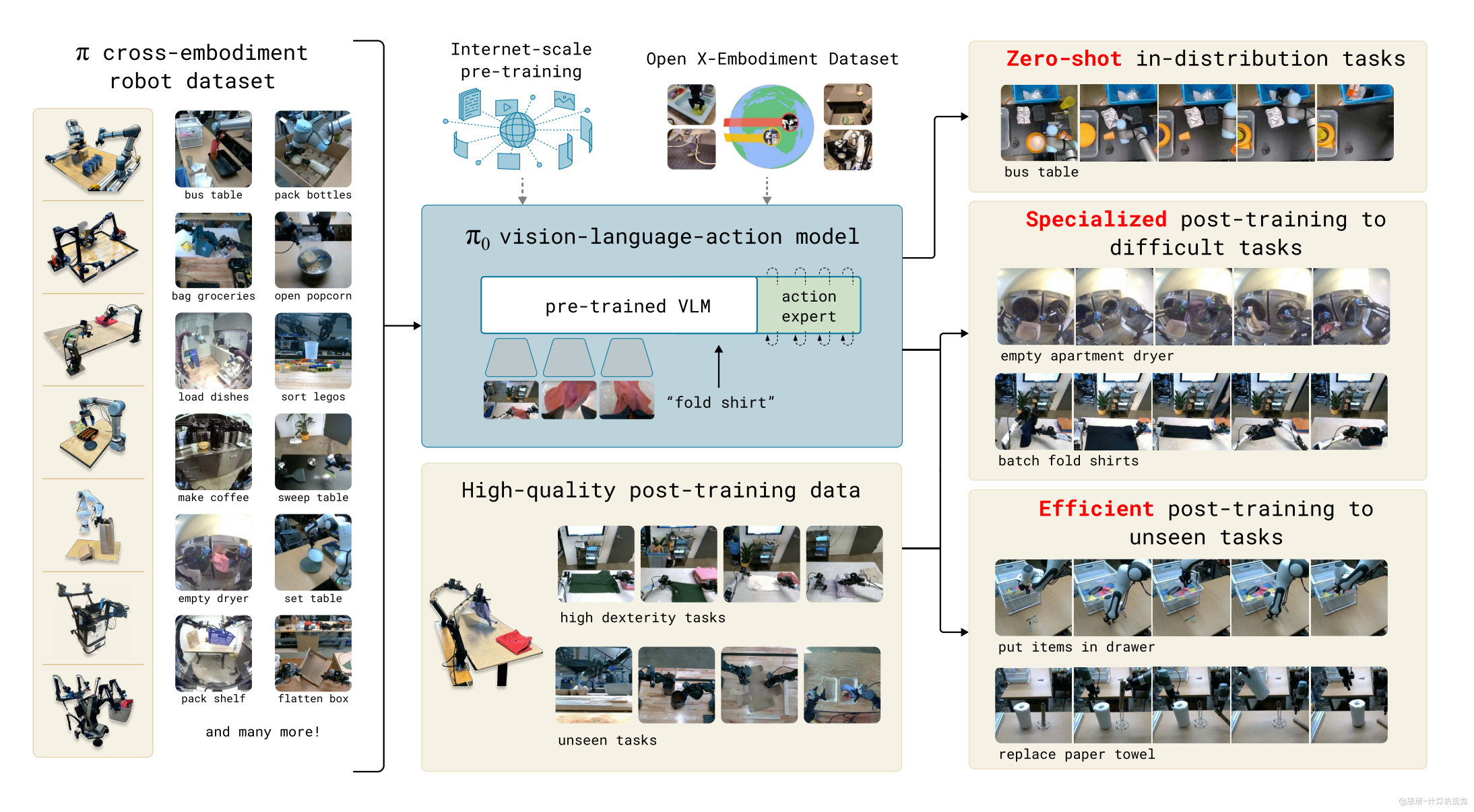
Pi0 是一个通用机器人策略基础模型,专为解决机器人学习中的数据稀缺、泛化能力差和鲁棒性不足等核心挑战而设计。借鉴大语言模型的训练方法,Pi0 通过大规模预训练掌握广泛的机器人操作技能,并能通过微调快速适应具体任务需求。该模型支持高效的数据利用与快速部署,在有限数据下也能实现良好性能,为机器人智能化提供了一种可扩展的解决方案。
1. 环境安装
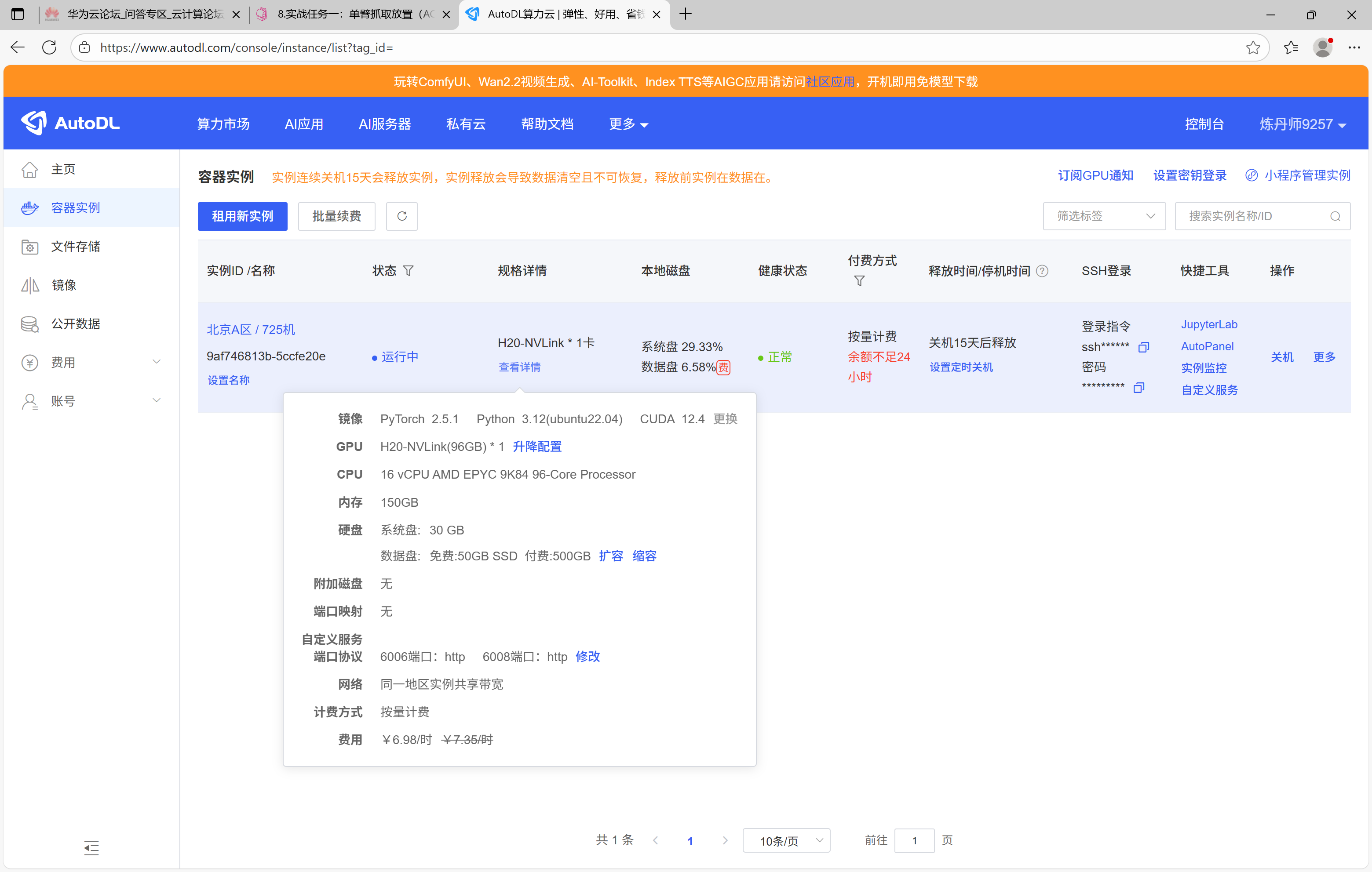
在LeRobot安装及使用教程的基础上,训练Pi0需要显存较大的显卡,我租赁的实例是 H20,使用VS Code SSH远程连接服务器:
# ssh -p 17825 root@region-42.seetacloud.com
Host region-42
HostName region-42.seetacloud.com
User root
Port 17825
在安装Pi0的过程中需要访问Github和HuggingFace等国外网站,建议开启AutoDL内置的学术加速服务,由于该加速服务可能对正常网络造成一定影响,安装过程中如果失败可以多次尝试,当不再需要时建议取消学术加速。
# 启用学术加速
source /etc/network_turbo
cd /root/autodl-tmp
git clone https://github.com/enpeizhao/openpi_episode1_student.git
cd openpi_episode1_student/
pip install uv
GIT_LFS_SKIP_SMUDGE=1 uv sync
GIT_LFS_SKIP_SMUDGE=1 uv pip install -e .
# 取消学术加速
unset http_proxy && unset https_proxy
2. 转换数据
Pi0训练必须是弧度制数据,安装ffmpeg转换为openpi格式:
sudo apt update
sudo apt install ffmpeg
uv run ./examples/libero/lerobot2oppi.py \
--source-repo-id=hou/demo_move_toy \
--target-repo-id=hou/demo_move_toy_openpi \
--output-path=./demo_move_toy_openpi \
--source-dataset-root=/root/autodl-tmp/demo_move_toy \
--max-episodes=100
3. 修改配置
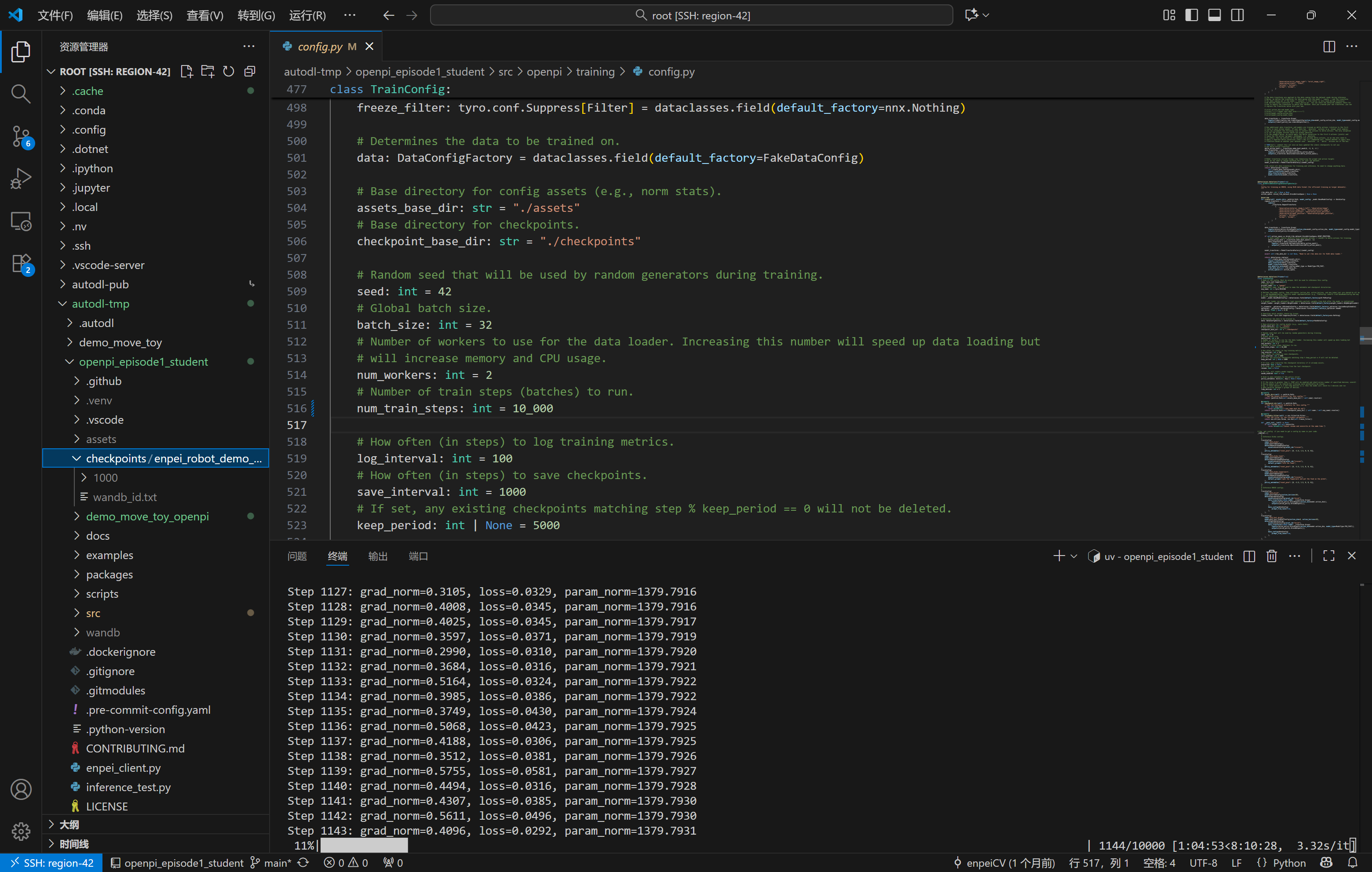
以下是我的配置文件,为了节省训练时间num_train_steps设置为10_000:
# 单臂配置:openpi_episode1_student/src/openpi/training/config.py
TrainConfig(
name="enpei_robot_demo_move_toy_low_mem_finetune",
# Here is an example of loading a pi0 model for LoRA fine-tuning.
model=pi0.Pi0Config(paligemma_variant="gemma_2b_lora", action_expert_variant="gemma_300m_lora"),
data=LeRobotLiberoDataConfig(
repo_id="hou/demo_move_toy_openpi", # 数据集repo_od
root="./demo_move_toy_openpi", # 数据集路径
base_config=DataConfig(prompt_from_task=True),
),
weight_loader=weight_loaders.CheckpointWeightLoader("/root/autodl-tmp/pi0_base/params"),
num_train_steps=10_000,
# The freeze filter defines which parameters should be frozen during training.
# We have a convenience function in the model config that returns the default freeze filter
# for the given model config for LoRA finetuning. Just make sure it matches the model config
# you chose above.
freeze_filter=pi0.Pi0Config(
paligemma_variant="gemma_2b_lora", action_expert_variant="gemma_300m_lora"
).get_freeze_filter(),
# Turn off EMA for LoRA finetuning.
ema_decay=None,
),
4. 模型训练
# 计算 normalization
uv run scripts/compute_norm_stats.py --config-name enpei_robot_demo_move_toy_low_mem_finetune
# 开启训练
XLA_PYTHON_CLIENT_MEM_FRACTION=0.9 uv run scripts/train.py enpei_robot_demo_move_toy_low_mem_finetune --exp-name=my_experiment --overwrite
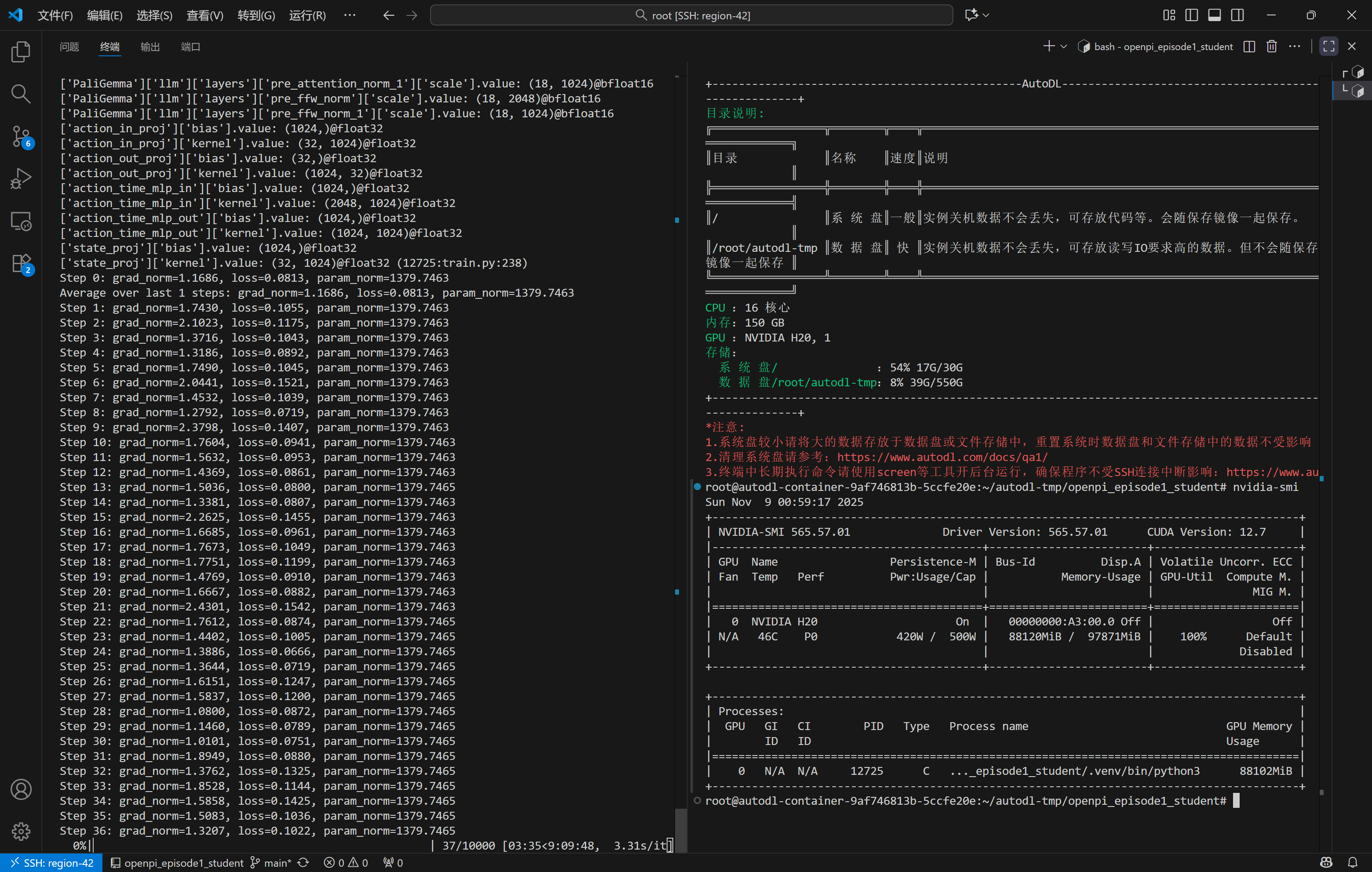
在训练过程中可以看到模型的LOSS在逐渐降低,也可以在终端中查看GPU的利用率,采集100个episodes数据使用H20迭代10_000步大概需要花费9个小时:
训练过程中Pi0会保存多个时间点的权重checkpoint,每次约消耗磁盘12G,因此建议将代码目录放到/root/autodl-tmp数据盘目录下,这样训练过程中产生的权重文件会自动保存在/root/autodl-tmp/checkpoints下,避免系统盘因空间不足导致训练失败。
5. 本文小结
本文介绍了在H20实例上安装和训练Pi0模型的完整流程,包括环境配置、数据转换、修改训练配置以及模型训练等关键步骤,并提供了相关命令和注意事项,帮助读者快速上手Pi0模型训练。

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)