LeRobot边缘侧部署操控机械臂夹云宝

【摘要】 本文详细介绍了在Ubuntu 20.04 LTS系统上安装配置LeRobot环境的完整流程,包括系统镜像制作、GPU驱动安装、Miniconda与PyTorch环境搭建、LeRobot代码部署及PCAN驱动配置等关键步骤。通过实际案例演示了从数据采集、ACT模型训练到板侧推理的全流程应用,为开展VAL具身智能学习与开发提供了完整的实践指导。
LeRobot边缘侧部署操控机械臂夹云宝
一、制作镜像
- 首先下载
Ubuntu 20.04 LTS官方镜像,这里我们选择Desktop image进行下载,下载地址为:
https://releases.ubuntu.com/focal/
2. 下载Linux镜像的烧录软件balenaEtcher,选择适合自己的操作系统,下载地址为:
https://etcher.balena.io/
3. 启动balenaEtcher,选择我们前面下载好的ubuntu-20.04.6-desktop-amd64.iso镜像,插入U盘作为系统启动盘进行烧录:
二、配置环境
- 安装系统后建议安装
GPU驱动,在命令行中依次运行:sudo apt update、ubuntu-drivers devices,他推荐的(recommended)驱动是:nvidia-driver-570。
== /sys/devices/pci0000:00/0000:00:01.0/0000:01:00.0 ==
modalias : pci:v000010DEd00001CBBsv000017AAsd0000225Fbc03sc00i00
vendor : NVIDIA Corporation
model : GP107GLM [Quadro P1000 Mobile]
driver : nvidia-driver-535 - distro non-free
driver : nvidia-driver-390 - distro non-free
driver : nvidia-driver-570 - distro non-free recommended
driver : nvidia-driver-450-server - distro non-free
driver : nvidia-driver-535-server - distro non-free
driver : nvidia-driver-470 - distro non-free
driver : nvidia-driver-418-server - distro non-free
driver : nvidia-driver-470-server - distro non-free
driver : nvidia-driver-570-server - distro non-free
driver : xserver-xorg-video-nouveau - distro free builtin
- 在命令行中输入
sudo apt install nvidia-driver-570进行安装,安装成功之后重启系统输入nvidia-smi查看当前驱动支持的最高CUDA版本。
hou@hou-ThinkPad-P52:~$ nvidia-smi
Thu Oct 30 11:41:48 2025
+-----------------------------------------------------------------------------------------+
| NVIDIA-SMI 570.133.07 Driver Version: 570.133.07 CUDA Version: 12.8 |
|-----------------------------------------+------------------------+----------------------+
| GPU Name Persistence-M | Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap | Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|=========================================+========================+======================|
| 0 Quadro P1000 Off | 00000000:01:00.0 Off | N/A |
| N/A 43C P8 N/A / 5001W | 7MiB / 4096MiB | 0% Default |
| | | N/A |
+-----------------------------------------+------------------------+----------------------+
+-----------------------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=========================================================================================|
| 0 N/A N/A 1159 G /usr/lib/xorg/Xorg 4MiB |
+-----------------------------------------------------------------------------------------+
- 下载安装
Miniconda,在命令行中依次运行如下命令:
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh
bash ~/Miniconda3-latest-Linux-x86_64.sh
- 安装成功之后打开一个新的终端安装
Pytorch 2.6.0,CUDA的版本要>=12.6。
conda clean -i
conda create -n lerobot python=3.10.12 -y
conda activate lerobot
pip install torch==2.6.0 torchvision==0.21.0 torchaudio==2.6.0 --index-url https://download.pytorch.org/whl/cu126
python -c "import torch; print(torch.cuda.is_available())"
- 下载修改后的
lerobot代码,支持恩培老师的机械臂🦾。
git clone https://github.com/enpeizhao/lerobot_single_student
cd lerobot_single_student
pip install -e . -i https://mirrors.huaweicloud.com/repository/pypi/simple
pip install 'lerobot[feetech]'
sudo apt install ffmpeg
- 安装
PCAN-Linux驱动,下载地址为:
https://peak-system.com.cn/driver/
- 下载之后解压进入安装包目录
cd peak-linux-driver-8.20.0,依次运行如下命令:
sudo apt install libpopt-dev
make clean all
sudo make install
- 安装成功之后我们可以加载模块并查看
pcan版本信息:
sudo modprobe pcan
pcaninfo
- 成功打印版本即代表安装成功😌
PCAN driver version: 8.20.0
PCAN-Basic version: 4.10.0.4
三、ACT 边缘部署
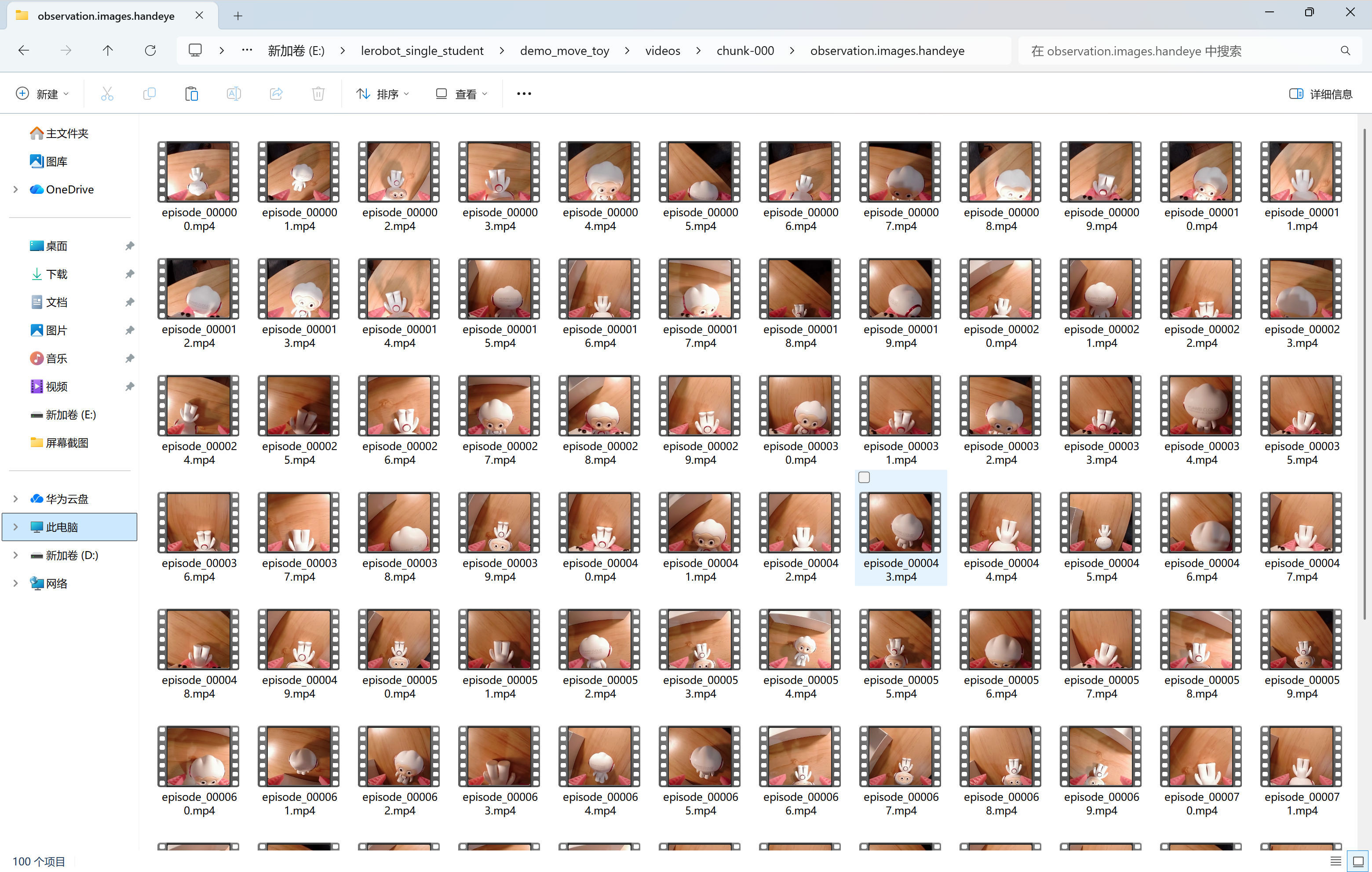
- 我们遥操机械臂采集了
100组动作视频用于ACT模型的训练:
python -m lerobot.record \
--robot.ip_address="localhost" \
--robot.port=12345 \
--robot.type=enpei_follower \
--robot.id=enpei_follower \
--robot.cameras="{ handeye: {type: opencv, index_or_path: 4, width: 320, height: 240, fps: 30}, fixed: {type: opencv, index_or_path: 2, width: 320, height: 240, fps: 30}}" \
--teleop.type=enpei_leader \
--teleop.port=/dev/ttyACM0 \
--teleop.id=enpei_leader \
--display_data=true \
--enpei_use_radian=true\
--dataset.repo_id=hou/demo_move_toy \
--dataset.push_to_hub=false \
--dataset.num_episodes=100\
--dataset.episode_time_s=15 \
--dataset.reset_time_s=5 \
--dataset.single_task="Put the toy to the white block" \
--dataset.root=/home/hou/workspace/lerobot_single_student/demo_move_toy \
--resume=false
2. 云服务器的环境配置与本地被配置基本一致,总共训练200000个steps:
python ./src/lerobot/scripts/train.py \
--dataset.repo_id=hou/demo_move_toy_degrees \
--dataset.root=./demo_move_toy_degrees\
--policy.type=act \
--output_dir=outputs/train/demo_move_toy_degrees_act \
--job_name=demo_move_toy_degrees \
--policy.device=cuda \
--policy.push_to_hub=false \
--wandb.enable=false\
--batch_size=32 \
--num_workers=8 \
--steps=200000

3. 我们在Jetson Orin Nano上实现了ACT模型的GPU实时推理,Jetpack的版本>=6.0,最终推理效果如下😜:
python -m lerobot.test_policy \
--robot.ip_address="localhost" \
--robot.port=12345 \
--robot.type=enpei_follower \
--robot.id=enpei_follower \
--robot.cameras="{ handeye: {type: opencv, index_or_path: 0, width: 320, height: 240, fps: 30}, fixed: {type: opencv, index_or_path: 2, width: 320, height: 240, fps: 30}}" \
--policy.path=last/pretrained_model\
--fps=30 \
--time_s=120 \
--single_task="Put the toy to the white box" \
--enpei_use_radian=false \
--display_data=true

四、小结
本文详细介绍了在Ubuntu 20.04 LTS系统上安装配置LeRobot环境的完整流程,包括系统镜像制作、GPU驱动安装、Miniconda与PyTorch环境搭建、LeRobot代码部署及PCAN驱动配置等关键步骤。通过实际案例演示了从数据采集、ACT模型训练到板侧推理的全流程应用,为开展VAL具身智能学习与开发提供了完整的实践指导。

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)