机器人&自动驾驶中的时间同步

0.时间同步技术介绍
对于自动驾驶技术的实现,涉及到感知、规划、执行三个层面。由于车辆行驶在未知动态环境中,需要事先构建出环境地图并在地图中进行自我定位,这其中涉及到各传感器数据的精确时间同步。然后根据传感器捕获的原始数据和已有环境场景,规划车辆从一个位置到另一个位置的路径。最后控制系统发出信号控制车上的电机或者液压执行器执行相应的动作。试想在感知融合阶段,左侧车道有一辆时速80km/h的车辆正准备超车变道,由于没有时间同步,激光300ms前的点云数据与相机当前的图像数据融合。融合时激光点云数据置信度又高于图像数据,则决策单元误判断为后车没有超车行为,继续当前的行车状态或加速行驶,那么下一秒则可能酿成“亲人两行泪”这一悲剧。
除了硬件时钟偏差的原因,各种传感器的采样频率也不一致,当前激光典型采样频率为10HZ,相机为30fps,高精度组合导航为100HZ。没有准确的时钟同步,各传感器在哪一帧进行融合,在哪里进行插值都没法进行判断。两个传感器即使采样频率一致,其每帧数据的采样点也一般不一致。真正应了那句,不主动求变,那就只能生死由命富贵在天了。
通过设置唯一的时钟主机给各类传感器提供相同的基准时间。但是由于各传感器设备时钟晶振及数据传输路径不同,需要根据提供的基准时间校准各自的时钟时间,实现时间同步。最后根据校准后的时间为采集数据加上时间戳信息,这样就可以保证同一时刻采集相同的环境信息。
1. “两条族规”-PPS+GPRMC
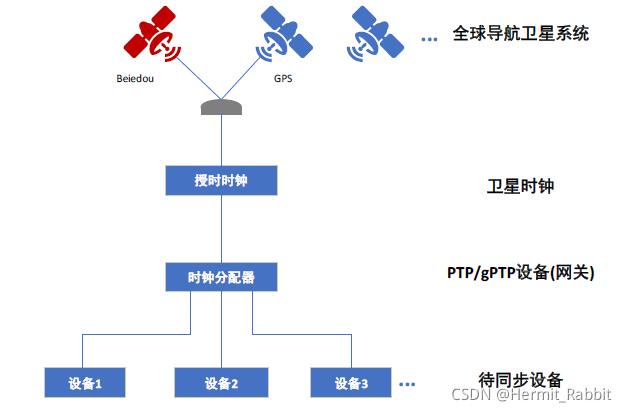
GNSS接收机加冕完成后,会颁布两条族规。一条是时间周期为1s的同步脉冲信号PPS,脉冲宽度5ms~100ms;一条是通过标准串口输出GPRMC标准的时间同步报文。同步脉冲前沿时刻与GPRMC报文的发送在同一时刻,误差为ns级别,误差可以忽略。GPRMC是一条包含UTC时间(精确到秒),经纬度定位数据的标准格式报文。
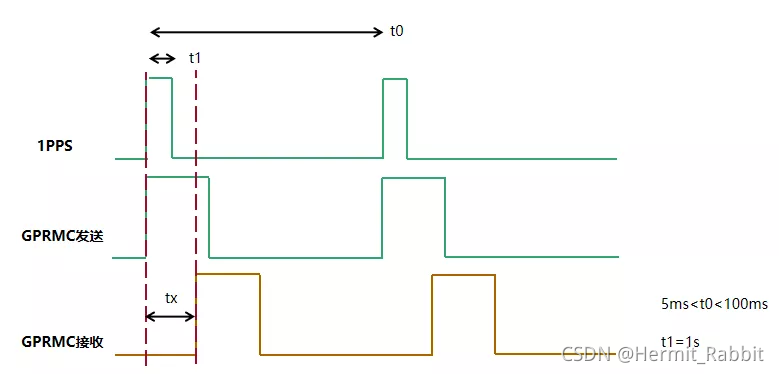
PPS秒脉冲为物理电平输出,接收及处理PPS信号的时间在ns级别,依旧可以忽略。但GPRMC数据一般通过波特率9600的串口发送,发送、接收、处理时间tx在ms级别,是时间同步的关键。以下是使用PPS+GPRMC进行时间同步的原理。
(1)设备收到PPS秒脉冲信号后,将内部以晶振为时钟源的系统时间里的毫秒及以下时间清零,并由此开始计算毫秒时间。
(2)当收到GPRMC数据后,提取报文里的时、分、秒、年、月、日UTC时间。
(3)将收到秒脉冲到解析出GPRMC中UTC时间所用的时间tx,与UTC整秒时间相加,同步给系统时间,至此已完成一次时间同步。下一秒再进行相同的过程,每秒准确校准一次。
聪明的人可能已经恍然大悟,后面哪个小弟需要进行时间同步,谁做两根线接上这两个物理接口就妥了。可见你是一位自以为是的主管,一位听不进去良言的中层!
(1)PPS是一个低功率的脉冲电平信号,驱动电流少的只有0.5mA,多的也就20mA,带几个小弟还行,十几个就很困难了。
(2)PPS是无屏蔽的单线脉冲信号,十几根PPS线穿梭在车内,极易受到车内恶劣电磁环境的干扰,届时根本无法区分出是干扰脉冲还是同步脉冲。
(3)GPRMC通过RS232串口发送同步报文,RS232是一种1对1的全双工通信形式,也可以通过主从形式实现1对几数据传输。但对十几,实属罕见,只能通过试验验证到底可不可行。但至少线束工程师是打死不愿答应的。
(4)当时钟源丢失的时候,所有需要时间同步的设备都一下子没有了主心骨,每个小弟都可以自立门户,没有二当家的及时站出来,主持大局。这对功能安全要求极高的自动驾驶系统来说,根本无法接受。
2. 高精度时间同步协议PTP
因此基于单纯的PPS和GPRMC实现整个自动驾驶系统的时间同步,具有理论可行性,但并不具有实际可操作性。而基于网络的高精度时间同步协议PTP(Precision Time Protocol,1588 V2),同步精度可以达到亚微秒级。
PTP是一种主从式的时间同步系统,采用硬件时间戳,因此可以大幅减少软件处理时间。同时PTP可运行在L2层(MAC层)和L4层(UDP层),运行在L2层网络时,直接在MAC层进行报文解析,不用经过四层UDP协议栈,从而大幅减少协议栈驻留时间,进一步提高时间同步精度,对于自动驾驶系统来说非常友善。
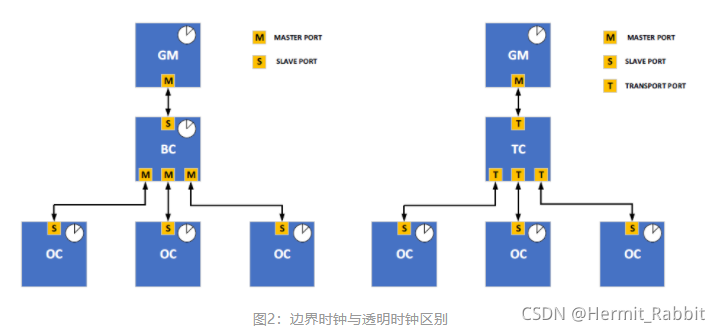
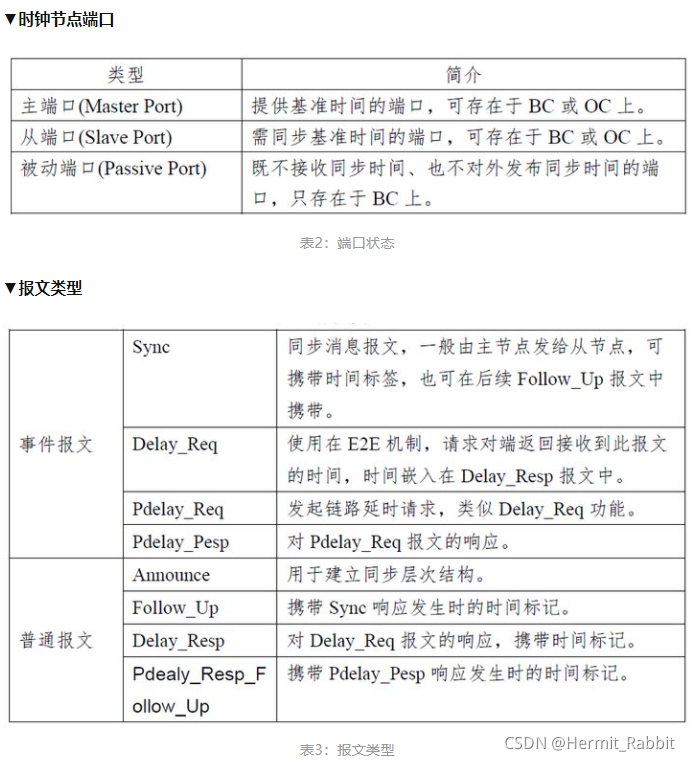
设备中运行PTP协议的网络端口称为PTP端口,PTP主端口用来发布时间,PTP从端口用来接收时间。同时定义了三种时钟节点,边界时钟节点(BC,Boundary Clock)、普通时钟节点(OC,Ordinary Clock)和透明时钟节点(TC,Transparent clock)。
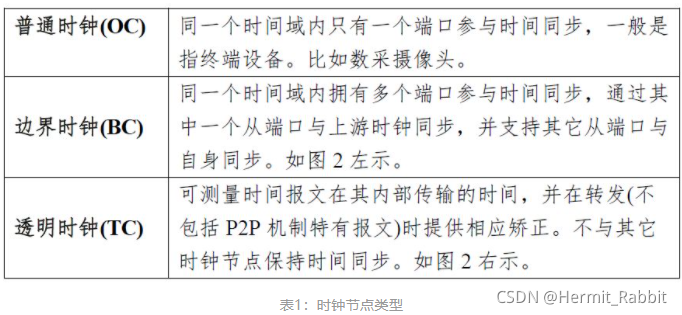
(1)边界时钟节点拥有多个PTP端口,其中一个用来同步上游设备时间,其余端口用来向下游设备发送时间。当边界时钟节点的上游时间同步设备是GNSS接收机时,此时的边界时钟节点就是一个主时钟节点(最优时钟)
(2)普通时钟节点只有一个PTP端口,用来同步上游时钟节点的时间。
(3)透明时钟,人如其名,具有多个PTP端口,收到什么时间,转发什么时间,不进行协议解析,内部不参与时间同步。
PTP通过在主从设备之间交互同步报文,并记录下报文发送时间,从而计算网络传输延迟和主从设备间时钟的偏差。PTP定义了四条同步报文:Sync、Follow_Up、Delay_Req、Delay_Resp,精确同步过程如下。
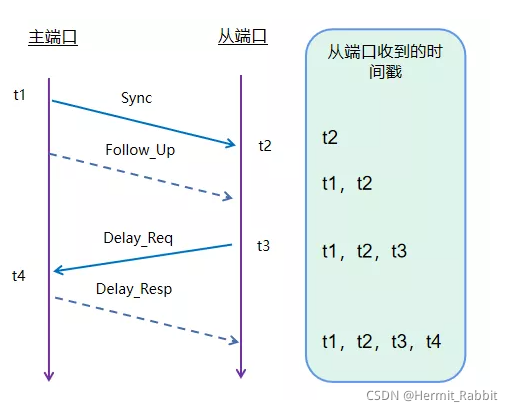
(1)PTP主端口向从端口发送Sync报文,同步记录下Sync发送的时间t1。从端口收到Sync报文后,记录下收到的时间t2。
(2)紧接着主端口将t1时间放到Follow_Up报文发送给从端口,从端口收到此报文后就可以解析出t1,并由此得到第一个方程式:t1+网络延时+时钟偏差=t2。
(3)从端口向主端口发送Delay_Req报文,同步记录下Delay_Req发送的时间t3。主端口收到报文后,记录下收到的时间t4。
(4)紧接着主端口将t4时间放到Delay_Resp报文发送给从端口,从端口收到此报文后就可以解析出t4,并由此得到第一个方程式:t3+网络延时-时钟偏差=t4。
两个未知数,两个方程组,应用初中数学知识可以解出:网络延时=[(t2-t1)+(t4-t1)]/2,时钟偏差=[(t2-t1)-(t4-t3)]/2。
3. 全域架构时间同步方案
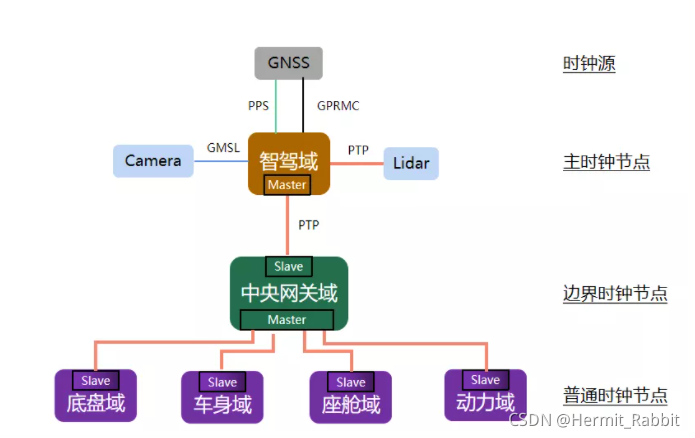
全域架构下,智驾域控制器因为直接连接GNSS接收机(或内置),而GNSS又是绝佳的时钟源,因此智驾域控制器自然而然成为主时钟节点,中央网关域控制器通过车载以太网主干网串联起其它域控制器,自然而然成为边界时钟的最佳选择,这样在时钟源丢失的时候,边界时钟节点同步主时钟节点的系统时间,仍然可以保持整个全域架构内相对时间一致。
其它域内传感器、执行器的时间同步需求,若没有,此域控制器设计成普通时钟节点即可。如有,可以设计成边界时钟,以保证无时钟源时的相对时间统一。
基于以太网设备的时间同步方案已经完善,而对于非车载以太网设备但有非常强烈同步需求的相机,我们还得特殊处理一下。将相机设置为外触发模式,通过主控给相机外触发脉冲信号。相机拍照时,曝光时刻也会产生脉冲信号发送给主控,主控记录此时系统时间,并将时间戳数据放到相机的图像数据里。
4. 参考链接
https://mp.weixin.qq.com/s/zE32DmNAVthRBlPXK9OA3w
https://zhuanlan.zhihu.com/p/135938786

- 点赞
- 收藏
- 关注作者
评论(0)