基于HD-MAP的自动驾驶定位技术

【摘要】 0. 前言最近公司需要实现基于HD-MAP的自动驾驶定位技术,而这方面之前涉及的较少,自动驾驶这部分的定位技术与SLAM类似,但是缺少了建图的工程,使用HD-MAP的形式来实现车辆的定位(个人感觉类似机器人SLAM当中的初始化+回环定位的问题)。下面是我个人的思考与归纳 1. AVP-SLAM从AVP-SLAM自动泊车SLAM中我们发现基础(封闭)的视觉定位模式避不开下面几个步骤A 首先...
0. 前言
最近公司需要实现基于HD-MAP的自动驾驶定位技术,而这方面之前涉及的较少,自动驾驶这部分的定位技术与SLAM类似,但是缺少了建图的工程,使用HD-MAP的形式来实现车辆的定位(个人感觉类似机器人SLAM当中的初始化+回环定位的问题)。下面是我个人的思考与归纳
1. AVP-SLAM
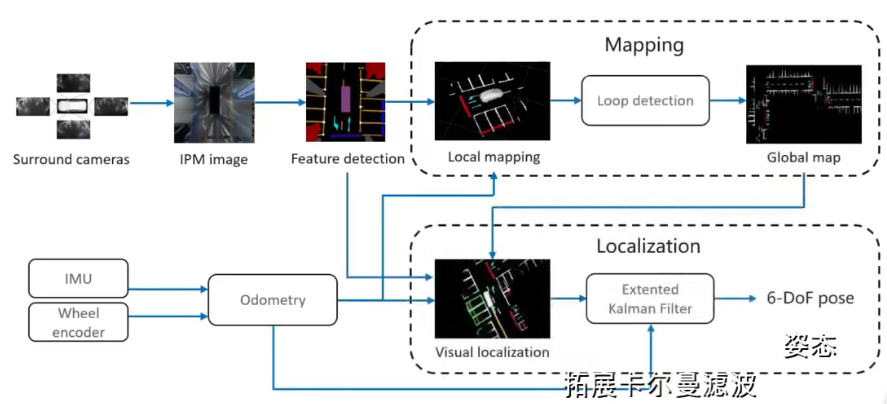
从AVP-SLAM自动泊车SLAM中我们发现基础(封闭)的视觉定位模式避不开下面几个步骤
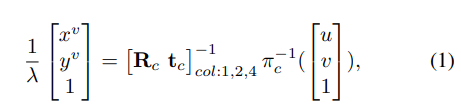
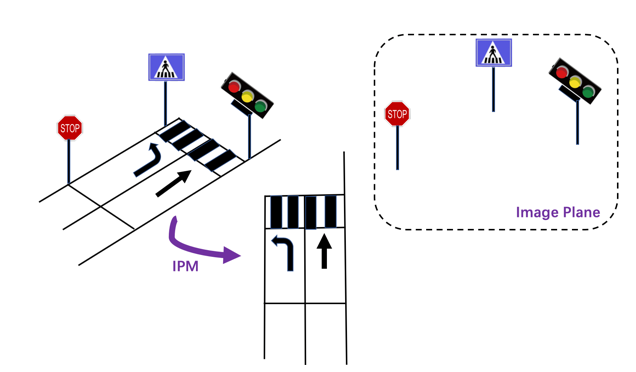
A 首先是IPM( Inverse Perspective Mapping )逆透视变换
B 语义特征提取:使用了CNN网络进行了语义特征的检测[1], U-Net [2]进行分割
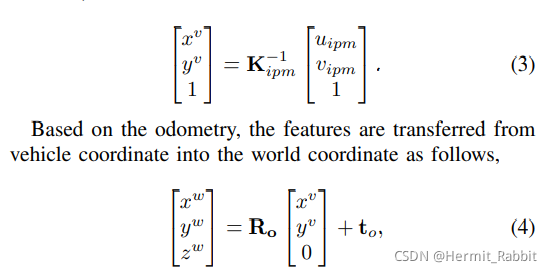
C 局部地图的构建:根据之前图像IPM的变换关系,可以将这些语义信息映射到三维空间中,并且根据里程计信息,将这些语义特征不断的变换到全局坐标下。
D 回环检测为了解决里程计的漂移的问题,这里使用了语义特征的局部地图不断的ICP全局地图,不断的局部优化。
E:全局优化,优化的残差为
F 定位:语义地图中的定位。如下图白色、红色和蓝色的圆点是地图上的停车线、减速带、指路标志。绿点是当前的特征。橙色线是估计的轨迹。通过将当前特征与地图匹配来定位车辆。停车位由停车位的角点和停车线拟合自动生成。
G 停车位的检测:由于停车线和停车位角点是从IPM图像中检测出来的,因此很容易自动检测停车位。角点用于预测停车点的位置。如果停车线与预测的停车位匹配良好,则该预测被认为是正确的。
2. Road-SLAM
…详情请参照古月居

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)