LIO-SAM框架:点云预处理前端---畸变矫正数据预处理

前言
LIO-SAM的全称是:Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
从全称上可以看出,该算法是一个紧耦合的雷达惯导里程计(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM库中的方法。
LIO-SAM 提出了一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架。
实现了高精度、实时的移动机器人的轨迹估计和建图。
其中点云运动畸变矫正的代码在图像投影的节点中
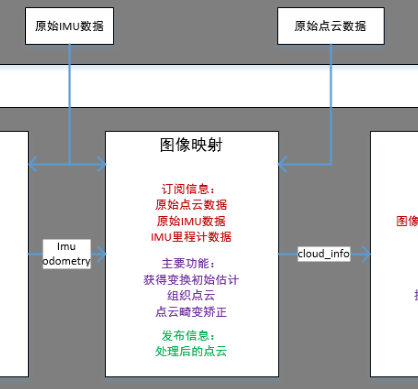
可以看到该节点 订阅 3种消息:
- 原始点云数据
- 原始imu数据
- imu预积分后预测的imu里程计数据
其中完成的一个主要功能就是进行畸变矫正。本篇博客主要解读其畸变矫正数据预处理部分。
激光雷达畸变矫正
什么是激光雷达的运动畸变 ?
激光雷达的一帧数据是过去一周期内形成的所有数据,数据仅有一时间戳,而非某个时刻的数据,因此在这一帧时间内的激光雷达或者其载体通常会发生运动,因此,这一帧的原点不一致,会导致一些问题,这个问题就是运动畸变
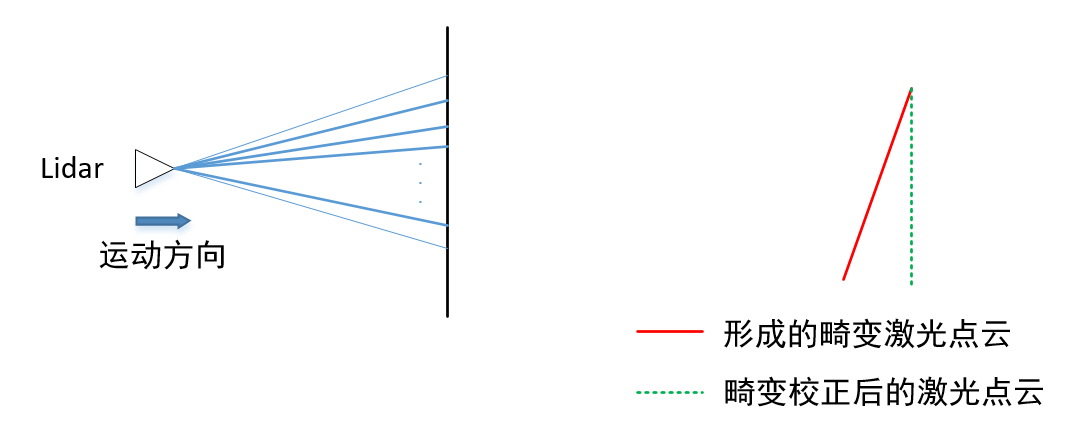
所以需要去运动畸变,也叫畸变校正
如何进行运动补偿?
运动补偿的目的就是把所有的点云补偿到某一时刻,这样就可以把本身在过去100ms内收集的点云统一到一个时间点上去 这个时间点可以是起始时刻,也可以是结束时刻,也可以是中间的任意时刻
常见的是补偿到起始时刻
Pstart = T_start_current * Pcurrent
畸变校准方法
因此运动补偿需要知道每个点时刻对应的位姿 T_start_current 通常有几种做法
1 如果有高频里程计,可以比较方便的获取每个点相对起始扫描时刻的位姿
2 如果有imu,可以方便的求出每个点相对起始点的旋转
3 如果没有其它传感器,可以使用匀速模型假设,使用上一帧间里程计的结果,作为当前两帧之间的运动,同时假设当前帧也是匀速运动,也可以估计出每个点相对起始时刻的位姿
k-1 到 k 帧 和 k到k+1帧的运动是一至的,用k-1到k帧的位姿变换当做k到k+1帧的位姿变换, 可以求到k到k+1帧的每个点的位姿变换
畸变矫正数据预处理
作者从lego-loam开始比较喜欢的一个操作,将点云投到 16*1800的cvMat上去,方便做后续的一些处理
这部分代码在 imageProjection.cpp 文件中
首先是标准的ros节点初始化
int main(int argc, char** argv)
{
ros::init(argc, argv, "lio_sam");
ImageProjection IP;//图像投影对象
ROS_INFO("\033[1;32m----> Image Projection Started.\033[0m");
//三个线程
ros::MultiThreadedSpinner spinner(3);
spinner.spin();
return 0;
}
开了三个线程
然后则继续看ImageProjection 这个类
首先看其构造函数
ImageProjection():
deskewFlag(0)
{
subImu = nh.subscribe<sensor_msgs::Imu>(imuTopic, 2000, &ImageProjection::imuHandler, this, ros::TransportHints().tcpNoDelay());
subOdom = nh.subscribe<nav_msgs::Odometry>(odomTopic+"_incremental", 2000, &ImageProjection::odometryHandler, this, ros::TransportHints().tcpNoDelay());
subLaserCloud = nh.subscribe<sensor_msgs::PointCloud2>(pointCloudTopic, 5, &ImageProjection::cloudHandler, this, ros::TransportHints().tcpNoDelay());
订阅
- imu数据,
- imu预积分预测的里程计数据,
- 原始点云数据
pubExtractedCloud = nh.advertise<sensor_msgs::PointCloud2> ("lio_sam/deskew/cloud_deskewed", 1);
pubLaserCloudInfo = nh.advertise<lio_sam::cloud_info> ("lio_sam/deskew/cloud_info", 1);
发布
- 运动补偿后的点云
- 点云相关信息
allocateMemory(); // 为各个指针分配内存
resetParameters(); // 为其他参数进行初始化与重置
进行各个指针分配内存及参数初始化
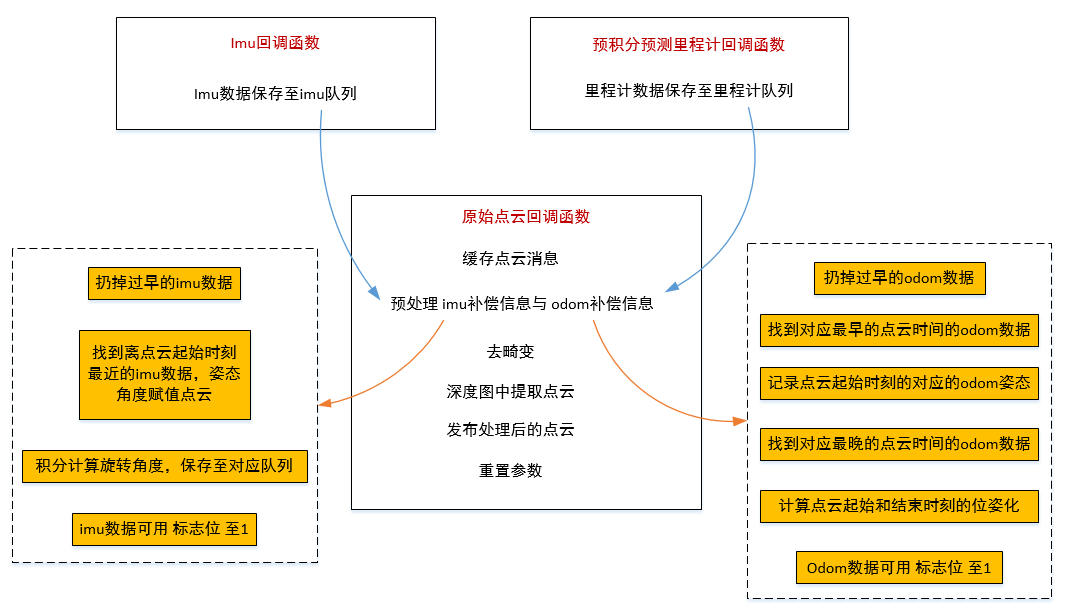
下面来看imu的回调函数 imuHandler
void imuHandler(const sensor_msgs::Imu::ConstPtr& imuMsg)
{
sensor_msgs::Imu thisImu = imuConverter(*imuMsg);
std::lock_guard<std::mutex> lock1(imuLock);
imuQueue.push_back(thisImu);
对imu做一个坐标转换
加一个线程锁,把imu数据保存进队列
下面来看里程计的回调函数 odometryHandler
void odometryHandler(const nav_msgs::Odometry::ConstPtr& odometryMsg)
{
std::lock_guard<std::mutex> lock2(odoLock);
odomQueue.push_back(*odometryMsg);
}
把里程计数据存入到 里程计队列里面去
主要的操作在原始的点云回调中cloudHandler
void cloudHandler(const sensor_msgs::PointCloud2ConstPtr& laserCloudMsg)
输入就是 激光雷达 发布的点云的消息
在里面实现了 6个 函数,对应着六个功能
if (!cachePointCloud(laserCloudMsg)) //缓存点云消息 并进行相关检查
return;
if (!deskewInfo())//获得运动补偿所需要的信息
return;
projectPointCloud();
cloudExtraction();
publishClouds();
resetParameters();
首先看第一个函数
cachePointCloud
bool cachePointCloud(const sensor_msgs::PointCloud2ConstPtr& laserCloudMsg)
{
cloudQueue.push_back(*laserCloudMsg);
if (cloudQueue.size() <= 2)
return false;
currentCloudMsg = std::move(cloudQueue.front());
cloudQueue.pop_front();
点云数据保存进队列
确保队列里大于两帧点云数据
缓存了足够的点云之后
取出第一帧点云
if (sensor == SensorType::VELODYNE)//处理VELODYNE的激光雷达
{
// 将ros格式的点云 转成 自定义的pcl格式的点云
pcl::moveFromROSMsg(currentCloudMsg, *laserCloudIn);//将ros的点云类型转换为 pcl的
}
else if (sensor == SensorType::OUSTER)//处理OUSTER的激光雷达
{
// Convert to Velodyne format
pcl::moveFromROSMsg(currentCloudMsg, *tmpOusterCloudIn);
laserCloudIn->points.resize(tmpOusterCloudIn->size());
laserCloudIn->is_dense = tmpOusterCloudIn->is_dense;
for (size_t i = 0; i < tmpOusterCloudIn->size(); i++)
{
auto &src = tmpOusterCloudIn->points[i];
auto &dst = laserCloudIn->points[i];
dst.x = src.x;
dst.y = src.y;
dst.z = src.z;
dst.intensity = src.intensity;
dst.ring = src.ring;
dst.time = src.t * 1e-9f;
}
}
else//如果是其它类型 激光雷达 报错 关闭ros
{
ROS_ERROR_STREAM("Unknown sensor type: " << int(sensor));
ros::shutdown();
}
根据不同型号的激光雷达,转成pcl的点云格式
cloudHeader = currentCloudMsg.header;
timeScanCur = cloudHeader.stamp.toSec();
timeScanEnd = timeScanCur + laserCloudIn->points.back().time;
获得该帧点云的时间戳
- 起始点时间
- 结束点时间
header里面的时间就是起始点的时间
points.back().time 的时间就是 最后一个点相对于第一点的时间
所以这里就要求激光雷达要开启每个点的时间偏移信息
if (laserCloudIn->is_dense == false)
{
ROS_ERROR("Point cloud is not in dense format, please remove NaN points first!");
ros::shutdown();
}
检测点云是否有序排列的
static int ringFlag = 0;
if (ringFlag == 0)
{
ringFlag = -1;
for (int i = 0; i < (int)currentCloudMsg.fields.size(); ++i)
{
if (currentCloudMsg.fields[i].name == "ring")
{ //有一个点有就行了
ringFlag = 1;
break;
}
}
if (ringFlag == -1)
{ //没有的话会 运行不下去
ROS_ERROR("Point cloud ring channel not available, please configure your point cloud data!");
ros::shutdown();
}
}
因为ringFlag 是 static 所以只会检查一次
检测点云中的点 是否又ring的消息
ring 代表点云处理第几根scan
没有信息则直接崩掉
if (deskewFlag == 0)
{
deskewFlag = -1;
for (auto &field : currentCloudMsg.fields)
{
if (field.name == "time" || field.name == "t")
{ //有一个点有就行了
deskewFlag = 1;
break;
}
}
if (deskewFlag == -1)
//没有也可以运行 但是 去畸变无法生效
ROS_WARN("Point cloud timestamp not available, deskew function disabled, system will drift significantly!");
}
检查是否有时间戳消息
然后则看 deskewInfo()的函数
bool deskewInfo()
{
std::lock_guard<std::mutex> lock1(imuLock);
std::lock_guard<std::mutex> lock2(odoLock);
if (imuQueue.empty() || imuQueue.front().header.stamp.toSec() > timeScanCur || imuQueue.back().header.stamp.toSec() < timeScanEnd)
{
ROS_DEBUG("Waiting for IMU data ...");
return false;
}
确保imu的数据覆盖这一帧点云
imuDeskewInfo();
准备imu补偿信息
看里面具体内容
void imuDeskewInfo()
{
cloudInfo.imuAvailable = false;
先将 imu可用标志位清0
while (!imuQueue.empty())
{
if (imuQueue.front().header.stamp.toSec() < timeScanCur - 0.01)
imuQueue.pop_front();
else
break;
}
if (imuQueue.empty())
return;
扔掉过早的imu数据
for (int i = 0; i < (int)imuQueue.size(); ++i)
{
处理imu数据队列里面每个数据
sensor_msgs::Imu thisImuMsg = imuQueue[i];
double currentImuTime = thisImuMsg.header.stamp.toSec();
if (currentImuTime <= timeScanCur)
imuRPY2rosRPY(&thisImuMsg, &cloudInfo.imuRollInit, &cloudInfo.imuPitchInit, &cloudInfo.imuYawInit);
提取要处理的 imu数据
提取处理的这个imu的时间
离当前帧起始时刻最近的imu,把imu的姿态转换成欧拉角
if (currentImuTime > timeScanEnd + 0.01)
break;
这一帧遍历完了 就 break
if (imuPointerCur == 0){
imuRotX[0] = 0;
imuRotY[0] = 0;
imuRotZ[0] = 0;
imuTime[0] = currentImuTime;
++imuPointerCur;
continue;
}
起始帧 的 角度初始为0
double angular_x, angular_y, angular_z;
imuAngular2rosAngular(&thisImuMsg, &angular_x, &angular_y, &angular_z);
取出当前imu数据的的角速度
double timeDiff = currentImuTime - imuTime[imuPointerCur-1];
imuRotX[imuPointerCur] = imuRotX[imuPointerCur-1] + angular_x * timeDiff;
imuRotY[imuPointerCur] = imuRotY[imuPointerCur-1] + angular_y * timeDiff;
imuRotZ[imuPointerCur] = imuRotZ[imuPointerCur-1] + angular_z * timeDiff;
imuTime[imuPointerCur] = currentImuTime;
++imuPointerCur;
计算每一个时刻的姿态角,方便后续查找对应每个点云时间的值
--imuPointerCur;
if (imuPointerCur <= 0)
return;
cloudInfo.imuAvailable = true;//imu数据可用 标志位 至1
imu数据可用 标志位 至1
odomDeskewInfo();
然后是这个函数
功能是准备里程计补偿信息
void odomDeskewInfo()
{
cloudInfo.odomAvailable = false;
while (!odomQueue.empty())
{
if (odomQueue.front().header.stamp.toSec() < timeScanCur - 0.01)
odomQueue.pop_front();
else
break;
}
扔掉过早的数据
if (odomQueue.empty())
return;
if (odomQueue.front().header.stamp.toSec() > timeScanCur)
return;
排除错误的时间戳情况
for (int i = 0; i < (int)odomQueue.size(); ++i)
{
startOdomMsg = odomQueue[i];
if (ROS_TIME(&startOdomMsg) < timeScanCur)
continue;
else
break;
}
找到对应最早的点云时间的odom数据
tf::Quaternion orientation;
tf::quaternionMsgToTF(startOdomMsg.pose.pose.orientation, orientation);
将ros消息格式中的姿态转成tf的格式
double roll, pitch, yaw;
tf::Matrix3x3(orientation).getRPY(roll, pitch, yaw);
将四元数转成 欧拉角
cloudInfo.initialGuessX = startOdomMsg.pose.pose.position.x;
cloudInfo.initialGuessY = startOdomMsg.pose.pose.position.y;
cloudInfo.initialGuessZ = startOdomMsg.pose.pose.position.z;
cloudInfo.initialGuessRoll = roll;
cloudInfo.initialGuessPitch = pitch;
cloudInfo.initialGuessYaw = yaw;
cloudInfo.odomAvailable = true;
记录点云起始时刻的对应的odom姿态
有助于后续地图模块的初始位姿估计
cloudInfo.odomAvailable 就是标记 odom 提供了这一帧点云的初始位姿
if (odomQueue.back().header.stamp.toSec() < timeScanEnd)
return;
这里发现没有覆盖到最后的点云,那就不能用odom数据来做运动补偿
for (int i = 0; i < (int)odomQueue.size(); ++i)
{
endOdomMsg = odomQueue[i];
if (ROS_TIME(&endOdomMsg) < timeScanEnd)
continue;
else
break;
}
找到点云最晚时刻对应的odom数据
if (int(round(startOdomMsg.pose.covariance[0])) != int(round(endOdomMsg.pose.covariance[0])))
return;
这个代表odom退化了,就置信度不高了。直接return ,不使用odom进行补偿
Eigen::Affine3f transBegin = pcl::getTransformation(startOdomMsg.pose.pose.position.x, startOdomMsg.pose.pose.position.y, startOdomMsg.pose.pose.position.z, roll, pitch, yaw);
起始位姿和结束位姿 都转成 Affine3f 这个数据结构
Eigen::Affine3f transBegin = pcl::getTransformation(startOdomMsg.pose.pose.position.x, startOdomMsg.pose.pose.position.y, startOdomMsg.pose.pose.position.z, roll, pitch, yaw);
tf::quaternionMsgToTF(endOdomMsg.pose.pose.orientation, orientation);
tf::Matrix3x3(orientation).getRPY(roll, pitch, yaw);
Eigen::Affine3f transEnd = pcl::getTransformation(endOdomMsg.pose.pose.position.x, endOdomMsg.pose.pose.position.y, endOdomMsg.pose.pose.position.z, roll, pitch, yaw);
起始位姿和结束位姿 都转成 Affine3f 这个数据结构
float rollIncre, pitchIncre, yawIncre;
pcl::getTranslationAndEulerAngles(transBt, odomIncreX, odomIncreY, odomIncreZ, rollIncre, pitchIncre, yawIncre);
将这个增量转换成x y z和欧拉角的形式
odomDeskewFlag = true;
运行结束,前面的判断没有return掉,则表示可以用odom来进行运动补偿
总结

- 点赞
- 收藏
- 关注作者
评论(0)