数字图像基础

目录
一,视觉感知
1,人眼

锥状体位于视网膜中间的中央凹,感受颜色,有600-700万个,
杆状体分布在视网膜表面,感受细节、形状,有7500-15000万个。
锥状体视觉叫亮视觉,杆状体视觉叫暗视觉,比如,晚上月光下只有杆状体受刺激。
2,亮度适应和辨别
主观亮度:由人的视觉系统感知的亮度。
主观亮度是进入人眼的光强的对数函数。

二,光和电磁波谱
1,单色光、灰度级
没有颜色的光叫单色光,或无色光。
灰度级用来描述单色光的强度
2,光源的三属性
发光强度:光源流出能量的总量,单位瓦特
光通量:观察者从光源感受到的能量,单位流明,如红外光能量高,但光通量很低。
亮度:光感知的主观描绘,没有实际度量。
三,图像的感知和获取
1,单个传感器
使用单个传感器,需要有二维运动才能获得二维图像,
常见的两种方法,一种是线性运动+转动,即圆柱形,另一种是线性运动+线性运动,即平面床。
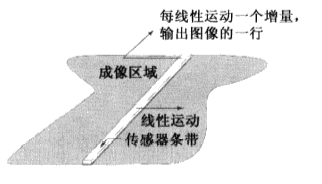
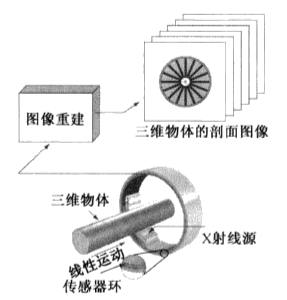
2,条带传感器
线性条带传感器
环形条带传感器
3,传感器阵列
如摄像机。
四,图像的采样和量化
大多数传感器的输出是连续电压波形,为了产生一幅数字图像,需要把连续的 感知数据转化为数字形式。这包括两种处理:取样和量化。
1,取样
图像空间坐标的数字化,一般都是均匀的坐标。
非统一的图像的采样:在灰度级变化尖锐的区域,用细腻的采样, 在灰度级比较平滑的区域,用粗糙的采样。

2,量化
图像函数值(灰度值)的数字化,一般都是均匀的量化。
非统一的图像的量化:在边界附近使用较少的灰度级。剩余的灰度级可用于灰度级变化比较平滑的区域,避免或减少由于量化的太粗糙,在灰度级变化比较平滑的区域出现假轮廓的现象。
五,图像的质量
1,灰度级和层次
灰度级:表示像素明暗程度的整数量,例如:像素的取值范围为0-255,就称该图像为256个灰度级的图像。
层 次:表示图像实际拥有的灰度级的数量。层次越多,视觉效果就越好。

2,对比度
对比度是指一幅图像中灰度反差的大小。
对比度 = 最大亮度 / 最小亮度,这里的最大和最小,指的是关键区域的最大最小亮度,而不是整个图像的,所以对比度是个主观概念,无法完全量化。

3,饱和度
饱和度是色彩的纯度,受到亮度和对比度的双重影响。
六,像素间关系
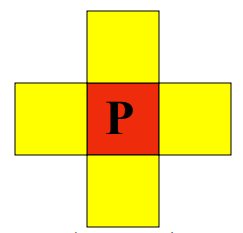
1,邻域
4邻域
D邻域
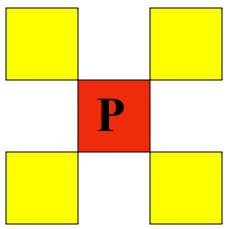
合起来就是8邻域
2,连通性
连通性是描述区域和边界的重要概念。
两个像素连通的两个必要条件是: 两个像素的位置是否相邻,两个像素的灰度值是否满足特定的相似性准则(或者是否相等)
连通类型:4连通,8连通,m连通(4连通和D连通的混合)
3,像素距离
空间中两点的距离,如欧式距离,D4距离(曼哈顿距离),D8距离
常用的就是欧式距离。
D4和D8距离示例:


文章来源: blog.csdn.net,作者:csuzhucong,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/nameofcsdn/article/details/118382256

- 点赞
- 收藏
- 关注作者
评论(0)