【阅读文献】单目视觉SLAM方法综述【1】~单目视觉SLAM分类方法

【摘要】 目录
1 单目视觉SLAM分类方法
1.1 基于概率框架的单目视觉SLAM
1.2 基于非概率框架的单目视觉SLAM方法
SLAM最先由Smith Self 和 Cheeseman于1987年提出,被认为是实现移动机器人真正自主的关键。
视觉传感器信息量大、灵活性高、成本低,其他传感器无法比拟,随着计算机视觉的发展和计算能力的增强,出现了大量利用摄影机作为传感器的...
目录
SLAM最先由Smith Self 和 Cheeseman于1987年提出,被认为是实现移动机器人真正自主的关键。
视觉传感器信息量大、灵活性高、成本低,其他传感器无法比拟,随着计算机视觉的发展和计算能力的增强,出现了大量利用摄影机作为传感器的视觉SLAM方法。
单目视觉SLAM仅使用一个摄像头,具有系统结构简单、成本低且易实现。
1 单目视觉SLAM分类方法
根据是否采用概率框架,分为两类:
- 基于概率框架的单目视觉SLAM
- 非概率框架的单目视觉SLAM
1.1 基于概率框架的单目视觉SLAM
总体思路:在给定了从初始时刻到当前时刻的控制输入以及观测数据的条件下,构建一个联合后验概率密度
函数来描述摄像机姿态和地图特征的空间位置。通过递归的贝叶斯滤波方法对此概率密度函数加以估计,
从而实现摄像机SLAM。
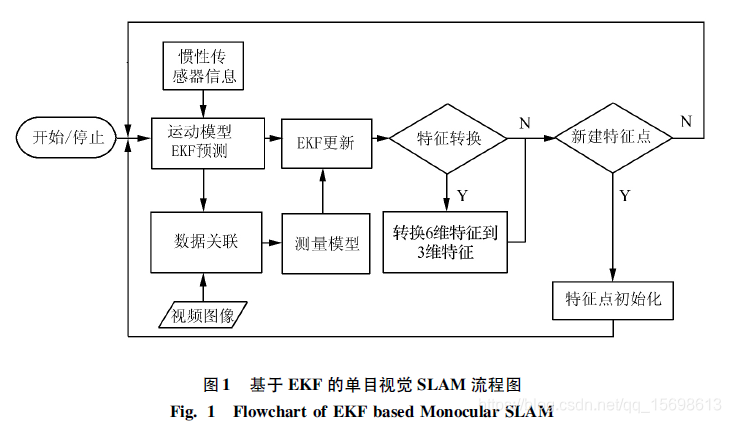
在该类方法中,使用扩展卡尔曼滤波实现SLAM是一种常见的解决方案:
- Davison实现了一种基于扩展卡尔曼滤波的实时单目SLAM系统--MonoSLAM
- Lemaire利用matlab实现了一个基于扩展卡尔曼滤波的单目SLAM仿真实验系统
- Roussillon利用高速摄像机实现了基于EKF的实时单目视觉SLAM系统RTSLAM
此外,还有利用粒子滤波概率滤波器实现单目视觉SLAM方法::
为了改进系统非线性给EKF带来的影响,无迹卡尔曼滤波器也被引入到单目时间SLAM算法中,但是比EKF增加了计算复杂度。
- Sim提出一种基于例子滤波的SLAM方法。原理是将运动路径和地图的联合后验分布估计问题分解为用例子滤波器对运动路径的估计问题和在已知路径下的路标估计问题。
- 然而,为保证定位精度,在复杂场景和运动中需要较多粒子,大大增加算法复杂度,重采样容易导致样本贫化等问题
1.2 基于非概率框架的单目视觉SLAM方法
主要是基于关键帧和稀疏捆绑调整等优化算法实现:
- Mouragnon利用摄像机最近采集的固定数目的图像作为关键帧,进行局部捆绑调整优化,以实现SLAM
- Klein提出一种基于关键帧的单目视觉SLAM系统PTAM。该系统利用一个线程对摄像机姿态进行跟踪,同时利用另外一个线程对关键帧数据以及所有特征点的空间位置进行捆绑调整,进而实现SLAM
基于图优化的SLAM方法也逐渐被引入到单目视觉SLAM中

顾照鹏, et al. "单目视觉同步定位与地图创建方法综述." 智能系统学报 10.4(2015):499-507.
文章来源: kings.blog.csdn.net,作者:人工智能博士,版权归原作者所有,如需转载,请联系作者。
原文链接:kings.blog.csdn.net/article/details/87906593

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)