【DE三维路径规划】基于matlab改进的差分算法多无人机协同三维路径规划【含Matlab源码 169期】

一、无人机简介
0 引言
随着现代技术的发展,飞行器种类不断变多,应用也日趋专一化、完善化,如专门用作植保的大疆PS-X625无人机,用作街景拍摄与监控巡察的宝鸡行翼航空科技的X8无人机,以及用作水下救援的白鲨MIX水下无人机等,决定飞行器性能主要是内部的飞控系统和外部的路径规划问题。就路径问题而言,在具体实施任务时仅靠操作员手中的遥控器控制无人飞行器执行相应的工作,可能会对操作员心理以及技术提出极高的要求,为了避免个人操作失误,进而造成飞行器损坏的危险,一种解决问题的方法就是对飞行器进行航迹规划。
飞行器的测量精度,航迹路径的合理规划,飞行器工作时的稳定性、安全性等这些变化对飞行器的综合控制系统要求越来越高。无人机航路规划是为了保证无人机完成特定的飞行任务,并且能够在完成任务的过程中躲避各种障碍、威胁区域而设计出最优航迹路线的问题。
1 常见的航迹规划算法
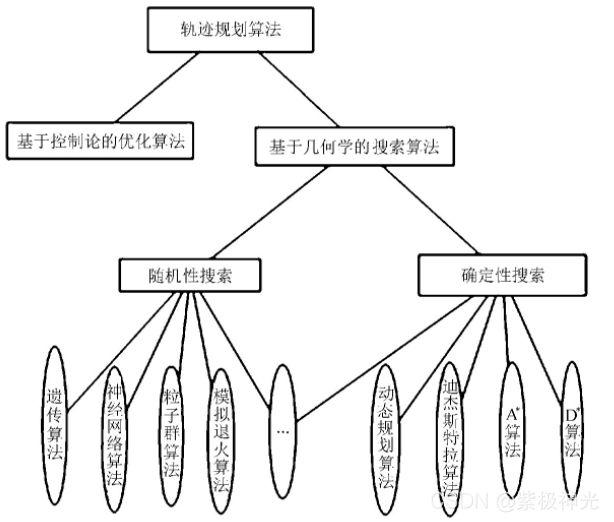
图1 常见路径规划算法
文中主要对无人机巡航阶段的航迹规划进行研究,假设无人机在飞行中维持高度与速度不变,那么航迹规划成为一个二维平面的规划问题。在航迹规划算法中,A算法计算简单,容易实现。在改进A算法基础上,提出一种新的、易于理解的改进A算法的无人机航迹规划方法。传统A算法将规划区域栅格化,节点扩展只限于栅格线的交叉点,在栅格线的交叉点与交叉点之间往往存在一定角度的两个运动方向。将存在角度的两段路径无限放大、细化,然后分别用两段上的相应路径规划点作为切点,找到相对应的组成内切圆的圆心,然后作弧,并求出相对应的两切点之间的弧所对应的圆心角,根据下式计算出弧线的长度

式中:R———内切圆的半径;
α———切点之间弧线对应的圆心角。
二、差分进化算法简介
1 差分进化算法的介绍
差分进化算法(Differential Evolution, DE)是一种基于群体差异的启发式随机搜索算法,该算法是由R.Storn和K.Price为求解Chebyshev多项式而提出的。DE算法也属于智能优化算法,与前面的启发式算法,如ABC,PSO等类似,都属于启发式的优化算法。DE算法是我在一篇求解盒子覆盖问题论文中使用的一种优化算法。
2 差分进化算法的流程
(1)初始化种群
(2)变异
(3)交叉
(4)选择

3 差分进化的具体步骤
对于无约束优化问题


4、选择
在DE中采用的是贪婪选择的策略,即选择较优的个体作为新的个体。
三、部分源代码
%清空环境
clear;
%定义地形对象
cTerrain = CTerrain3D;
%定义威胁区对象
cTread = CTread;
%调整为统一的图形环境
figure('Renderer','opengl');
%绘制地形和威胁区
cTerrain.draw();
cTread.draw();
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%数据形式说明
%xs 初始点位置集合,三维点集
%yt 目标点位置集合,三维点集
%MxsEna 能力矩阵,集合中的二元组表示最大最小飞行速度
%MxsDIs 最大航程矩阵,集合中的值表示UAV最大可飞的距离
%MytTOrd 任务点间的时序坐标,要求尽量在前面的先执行
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%调用目标分配算法
%AssignType表示不同的模型,1, N=M; 2, N>M; 3, N<M
%Key表示算法执行次数, 0,执行一次,1,执行多次
AssignType =1;
Key = 0;
%时间测试
Time = cputime;
%% 第一种情况的实验
if AssignType == 1
%%%%%%%%%%%%%%%%%%%%%%%数据区%%%%%%%%%%%%
xs = [%11 2 3;2 17 5; 34 26 7;5 2 2;6 33 3;27 34 6;21 45 5;25 12 3;22 17 11;13 31 12;
%45 21 11; 36 22 11;13 21 16;41 25 10;25 25 11;53 12 14;22 12 12;18 32 11; 67 34 12;26 16 15;
78 20 15;93 31 12;31 20 13;112 32 15; 134 26 17;45 52 12;36 63 13;67 34 16;21 85 15;32 62 13;];
yt = [%40 210 12;170 90 13 ; 80 197 21 ;172 120 13;160 56 13;160 143 21;170 200 21;113 200 12;97 134 16;100 145 11;
%81 101 21; 72 152 12; 133 60 11;84 164 21; 150 90 21;146 121 12; 167 54 12; 108 165 12;99 120 21;110 143 11;
70 181 12;15 133 13 ; 19 151 12 ;160 192 13;101 120 23;160 113 12;82 101 11;173 140 12;182 65 14; 128 156 12;];
MxsEna=[%0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3; 0.2 0.4;
% 0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;
0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.3 0.5;0.3 0.6;];
MxsDis=[%400 700 650 500 700 900 450 610 400 700
%650 500 700 900 450 610 700 900 450 610
500 700 300 350 700 900 450 610 450 610];
ytW = [%1 3 4 2 1 1 3 2 1 2
%3 2 1 3 2 1 2 3 2 1
1 1 1 1 1 1 1 1 1 1];
MytTOrd=[3 4; 5 2; 6 8; 7 4;];
%引入新的协同矩阵,最大起始时间矩阵
Twait = [];
Twindow=[];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if Key == 0
%%%%%%%%%%%%%%%%%%%%%%算法执行区%%%%%%%%%%%%%%%%%%
%调用目标分配算法,并取得解和相关数据,计算算法耗费时间
%定义目标分配算法对象
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,1);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
%DDEAssign1=DDEAssignTarget1(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd);
%执行run并返回结果集
t1 = cputime;
[solU solT solC solF ] = DDE1.run();
Time = cputime -t1;
% %结果
solU
solT
solC
solF
Time
else if Key == 1
for i=1:10
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,i);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
%DDEAssign1=DDEAssignTarget1(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd);
%执行run并返回结果集
t1 = cputime;
[solU solT solC solF ] = DDE1.run();
solu(i,:) = solU;
solt(i,:) = solT;
solc(i,:) = solC;
solf(i,:) = solF;
Time(i,:) = cputime -t1;
end %i
% %结果
solu
solt
solc
solf
Time
end % key=1
end % key=0
else if AssignType == 2
%% 第二种实验的情况
%%%%%%%%%%%%%%%%%%%%%%%数据区%%%%%%%%%%%%
xs = [%11 2 3;2 17 5; 34 26 7;5 2 2;6 33 3;27 34 6;21 45 5;25 12 3;22 17 11;13 31 12;
%45 21 11; 36 22 11;13 21 16;41 25 10;25 25 11;53 12 14;22 12 12;18 32 11; 67 34 12;26 16 15;
78 20 15;93 31 12;31 20 13;112 32 15; 134 26 17;45 52 12;36 63 13;67 34 16;21 85 15;32 62 13;];
yt = [%40 210 12;170 90 13 ; 80 197 21 ;172 120 13;160 56 13;160 143 21;170 200 21;113 200 12;97 134 16;100 145 11;
%81 101 21; 72 152 12; 133 60 11;84 164 21; 150 90 21;146 121 12; 167 54 12; 108 165 12;99 120 21;110 143 11;
70 181 12;15 133 13 ; 19 151 12 ;160 192 13 ];
MxsEna=[%0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3; 0.2 0.4;
% 0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;
0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.3 0.5;0.3 0.6;];
MxsDis=[%400 700 650 500 700 900 450 610 400 700
%650 500 700 900 450 610 700 900 450 610
500 700 300 350 700 900 450 610 450 610];
ytW = [%1 3 4 2 1 1 3 2 1 2
%3 2 1 3 2 1 2 3 2 1
1 1 1 1];
%这个数据里都代表的是目标点,是目标点与目标点的关系
MytTOrd=[3 2];
%引入新的协同矩阵,最大起始时间矩阵
Twait = [30 40 20 15 50 70 30 80 90 65];
Twindow=[];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if Key == 0
else if Key == 1
for i=1:20
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,i);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
%DDEAssign1=DDEAssignTarget1(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd);
%执行run并返回结果集
t1 = cputime;
[solU solT solC solF ] = DDE1.run();
solu(i,:) = solU;
solt(i,:) = solT;
solc(i,:) = solC;
solf(i,:) = solF;
Time(i,:) = cputime -t1;
end %i
% %结果
solu
solt
solc
solf
Time
end % key=1
end % key=0
else if AssignType == 3
%% 第三种实验的情况
%%%%%%%%%%%%%%%%%%%%%%%数据区%%%%%%%%%%%%
xs = [%11 2 3;2 17 5; 34 26 7;5 2 2;6 33 3;27 34 6;21 45 5;25 12 3;22 17 11;13 31 12;
%45 21 11; 36 22 11;13 21 16;41 25 10;25 25 11;53 12 14;22 12 12;18 32 11; 67 34 12;26 16 15;
78 20 15;93 31 12;31 20 13;112 32 15];
yt = [%40 210 12;170 90 13 ; 80 197 21 ;172 120 13;160 56 13;160 143 21;170 200 21;113 200 12;97 134 16;100 145 11;
%81 101 21; 72 152 12; 133 60 11;84 164 21; 150 90 21;146 121 12; 167 54 12; 108 165 12;99 120 21;110 143 11;
70 131 12;15 133 13 ; 19 151 12 ;160 192 13;101 120 23;160 113 12;82 101 11;173 140 12;182 65 14; 45 176 12;];
MxsEna=[%0.2 0.3; 0.2 0.4;0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3; 0.2 0.4;
% 0.4 0.75;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;0.2 0.3;0.35 0.45;0.3 0.5;0.3 0.6;
0.2 0.5; 0.3 0.4;0.4 0.75;0.3 0.45];
MxsDis=[%400 700 650 500 700 900 450 610 400 700
%650 500 700 900 450 610 700 900 450 610
700 700 900 650];
ytW = [%1 3 4 2 1 1 3 2 1 2
%3 2 1 3 2 1 2 3 2 1
1 1 1 1 1 1 1 1 1 1];
MytTOrd=[3 4; 5 2];
%引入新的协同矩阵,最大起始时间矩阵
Twait = [30 40 20 15];
Twindow=[1300,6000];
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
if Key == 0
%%%%%%%%%%%%%%%%%%%%%%算法执行区%%%%%%%%%%%%%%%%%%
%调用目标分配算法,并取得解和相关数据,计算算法耗费时间
%定义目标分配算法对象
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,1);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
%DDEAssign1=DDEAssignTarget1(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd);
%执行run并返回结果集
t1 = cputime;
[solU solT solC solF] = DDE1.run();
Time = cputime -t1;
% %结果
solU
solT
solC
solF
Time
else if Key == 1
for i=1:20
DDE1 = DMDEAssignTarget(cTerrain,xs,yt,MxsEna,MxsDis,ytW,MytTOrd,Twait,Twindow,i);
% MC = Cal1.GetMcost();
%Cal1 = CallocationTargetOld1(cTerrain);
%标签显示文字
xlabel('X/km')
ylabel('Y/km')
zlabel('Z/km')
t1 = cputime;
[solU solT solC solF ] = DDE1.run();
solu(i,:) = solU;
solt(i,:) = solT;
solc(i,:) = solC;
solf(i,:) = solF;
Time(i,:) = cputime -t1;
end %i
% %结果
solu
solt
solc
solf
Time
end % key=1
end % key=0
end % type =3
end % type =2
end % type=1
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
三、运行结果


五、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 包子阳,余继周,杨杉.智能优化算法及其MATLAB实例(第2版)[M].电子工业出版社,2016.
[2]张岩,吴水根.MATLAB优化算法源代码[M].清华大学出版社,2017.
[3]巫茜,罗金彪,顾晓群,曾青.基于改进PSO的无人机三维航迹规划优化算法[J].兵器装备工程学报. 2021,42(08)
[4]邓叶,姜香菊.基于改进人工势场法的四旋翼无人机航迹规划算法[J].传感器与微系统. 2021,40(07)
[5]马云红,张恒,齐乐融,贺建良.基于改进A*算法的三维无人机路径规划[J].电光与控制. 2019,26(10)
[6]焦阳.基于改进蚁群算法的无人机三维路径规划研究[J].舰船电子工程. 2019,39(03)
文章来源: qq912100926.blog.csdn.net,作者:海神之光,版权归原作者所有,如需转载,请联系作者。
原文链接:qq912100926.blog.csdn.net/article/details/113247810

- 点赞
- 收藏
- 关注作者
评论(0)