图的应用——最小生成树

【摘要】
最小生成树求最小生成树构造最小生成树的准则贪心算法(Greedy Algorithm)Prim(普里姆)算法算法思想 —— 归并顶点算法设计 KrusKal(克鲁斯卡尔)算法算法思想 —— 归并边算法设计 Prim和KrusKal比较
最小生成树
生成树(极小连通子图):含有图中全部n个顶点,但只有n-1条边。并且n-1条边不能构成回路。...
最小生成树
- 生成树(极小连通子图):含有图中全部n个顶点,但只有n-1条边。并且n-1条边不能构成回路。

- 生成森林:非连通图每个连通分量的生成树一起组成非连通图的生成森林。
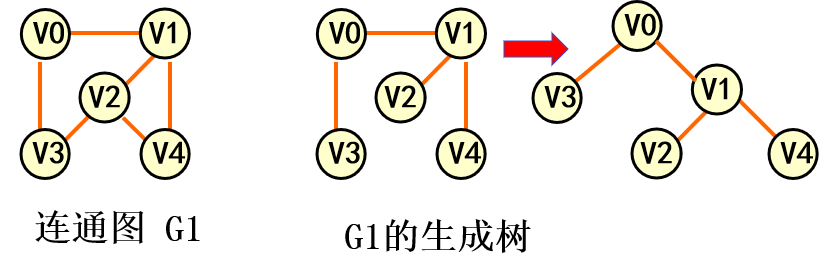
求最小生成树
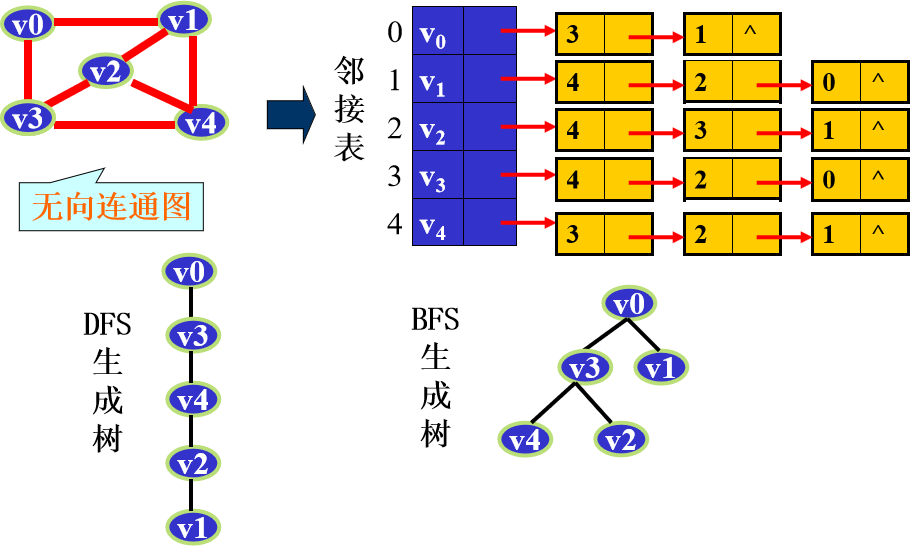
- 使用不同的遍历图的方法,可以得到不同的生成树
- 从不同的顶点出发,也可能得到不同的生成树。
- 按照生成树的定义,n 个顶点的连通网络的生成树有 n 个顶点、n-1 条边。
在网的多个生成树中,寻找一个各边权值之和最小的生成树
构造最小生成树的准则
- 必须只使用该网中的边来构造最小生成树;
- 必须使用且仅使用n-1条边来联结网络中的n个顶点
- 不能使用产生回路的边
贪心算法(Greedy Algorithm)
- 算法原理:以当前情况为基础作最优选择,而不考虑各种可能的整体情况,所以贪心法不要回溯。
- 算法优点:因为省去了为寻找解而穷尽所有可能所必须耗费的大量时间,因此算法效率高。
贪婪算法的精神就是“只顾如何获得眼前最大的利益”,有时不一定是最优解。
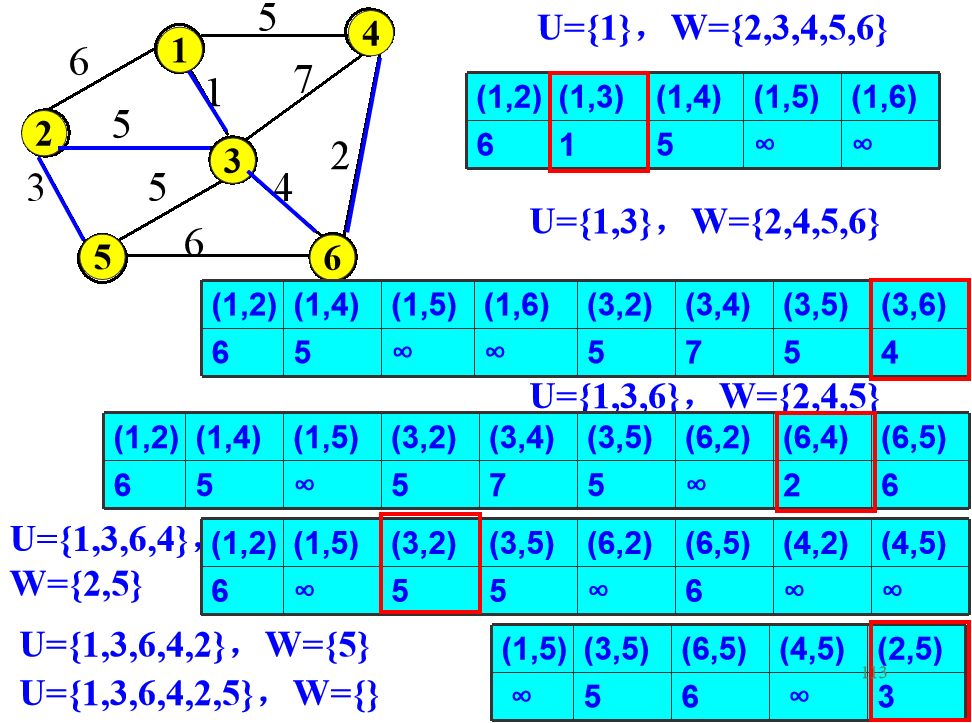
Prim(普里姆)算法
算法思想 —— 归并顶点
- 在图中任取一个顶点K作为开始点。令U={k},W=V-U,其中V为图中所有顶点集
- 在U中选取一个顶点,W中选取另一个顶点,使二者对应的边是最短的一条。将该边作为最小生成树的边保存起来,并将该边顶点全部加入U集合中,并从W中删去这些顶点。
- 重新调整U中顶点到W中顶点的距离, 使之保持最小,再重复此过程,直到W为空集止。
算法设计
- 在算法中需要设置一个辅助数组,对当前V-U集中的每个顶点,记录和顶点集U中顶点相连接的代价最小的边
struct {
VertexType adjvex; // U集中的顶点
VRType lowcost; // 边的权值
} closedge[MAX_VERTEX_NUM];
- 1
- 2
- 3
- 4
- lowcost[i]:表示以i为终点的边的最小权值,当lowcost[i]=0说明以i为终点的边的最小权值=0,也就是表示i点加入了MST
- adjvext[i]:表示对应lowcost[i]的起点,即说明边<adjvex[i],i>是MST的一条边,当adjvex[i]=0表示起点i加入MST
void MiniSpanTree_P(MGraph G, VertexType u){
// 用普利姆算法从顶点u出发构造网G的最小生成树
k = LocateVex_MG(G, u);
for(j = 0; j < G.vexnum; ++j) // 辅助数组初始化
if(j != k){ closedge[j].adjvex = new char[10]; strcpy(closedge[j].adjvex, G.vexs[k]); closedge[j].lowcost = G.arcs[k][j].adj;
}
closedge[k].lowcost = 0; // 初始, U = {u}
closedge[k].adjvex = new char[10];
strcpy(closedge[k].adjvex, G.vexs[k]);
for(i = 0; i > G.vexnum; i ++){
// //继续向生成树上添加顶点
mincost = INF; // 找权值最小的顶点
for(m = 0; m < G.vexnum; ++m) if(mincose > closedge[m].lowcost && closedge[m].lowcost != 0){ mincose = closedge[m].lowcost; k = m; } // 求出加入生成树的下一个顶点(k)
if(closedge[k].lowcost != 0) //输出生成树上一条边 cout << closedge[k].adjvex << G.vexs[k] << closedge[k].lowcost;
closedge[k].lowcost = 0; // 第k顶点并入U集
for(j = 0; j < G.vexnum; j++) // 修改其它顶点的最小边 if(G.arcs[k][j].adj < closedge[j].lowcost){ strcpy(closedge[j].adjvex, G.vexs[k]); closedge[j].lowcost = G.arcs[k][j].adj; }
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
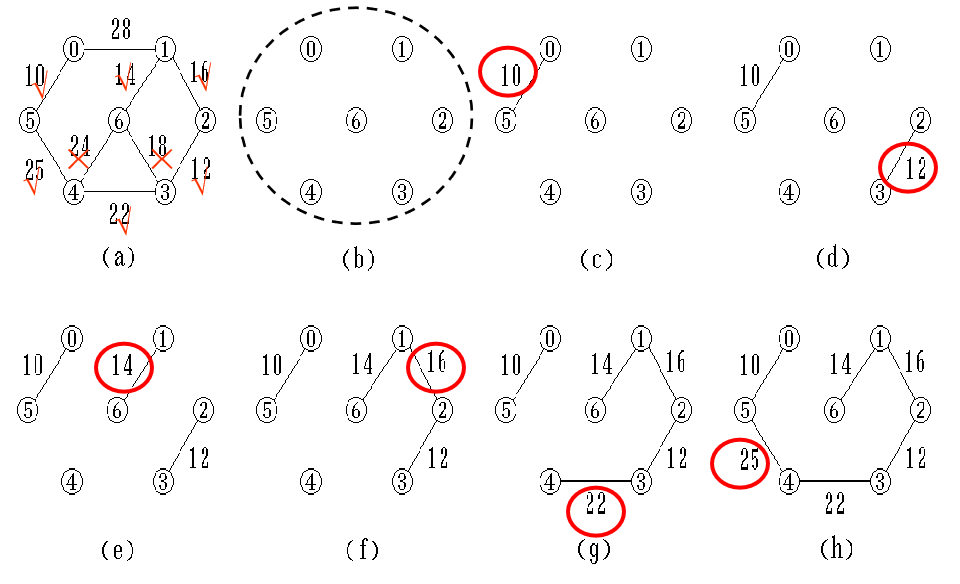
KrusKal(克鲁斯卡尔)算法
算法思想 —— 归并边
- 将图中所有边按权值递增顺序排列;
- 依次选定取权值较小的边,但要求后面选取的边不能与前面选取的边构成回路,若构成回路,则放弃该条边,再去选后面权值较大的边,n个顶点的图中,选够n-1条边即可。
算法设计
构造非连通图 ST=( V,{ } );
k = i = 0; // k 计选中的边数
while (k<n-1) {
++i;
检查边集 E 中第 i 条权值最小的边(u,v);
若(u,v)加入ST后不使ST中产生回路,
则 输出边(u,v); 且 k++;
}
typedef struct {
// 增加边结构定义
int beginvex, endvex; // 边的起点、终点
VRType cost; // 边的权值
} edgetype;
edgetype edges[MAX_VERTEX_NUM];
void MiniSpanTree_Kruskal(ALGraph &G){
int parents[MAX_VERTEX_NUM];
cin >> G.vexnum >> G.arcnum; // 顶点数、弧数
for(i = 0; i < G.vexnum; i++){
// 建立顶点表
G.vertices[i].data = new char[10];
cin >> G.vertices[i].data; // 读入顶点信息并初始化
G.vertices[i].firstarc = NULL;
}
for(k = 0; k < G.arcnum; k++){
// 建立边表
v1 = new char[10];
v2 = new char[10];
cin >> v1 >> v2 >> w;
i = LocateVex_ALG(G, v1);
j = LocateVex_ALG(G, v2);
edges[k].beginvex = i;
edges[k].endvex = j;
edges[k].cost = w;
p = new ArcNode;
p->info = NULL;
p->nextarc = G.vertices[i].firstarc;
G.vertices[i].firstarc = p;
}
Sort(G, edges); // 按权值大小,对边进行排序
for(i = 0; i < G.vexnum; i++)
parents[i] = 0;
for(i = 0; i < G.arcnum; i++){
bnf = Find(parents, edges[i].beginvex); // 查找边头分量
edf = Find(parents, edges[i].endvex); // 查找边尾分量
if(bnf != edf){ parents[bnf] = edf; cout << edges[i].beginvex << edges[i].endvex; cout << " " << edges[i].cost << endl;
}
}
}
int Find(int parents[], int f){
// 查找函数
while(parents[f] > 0) f = parents[f];
return f;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
Prim和KrusKal比较
| 算法名 | Prim | KrusKal |
|---|---|---|
| 时间复杂度 | O(n^2) | O(eloge) |
| 适应范围 | 稠密图 | 稀疏图 |
文章来源: ruochen.blog.csdn.net,作者:若尘,版权归原作者所有,如需转载,请联系作者。
原文链接:ruochen.blog.csdn.net/article/details/103762245

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)