FreeRTOS记录(六、FreeRTOS消息队列—Enocean模块串口通讯、RAM空间不足问题分析)

本篇文章记录FreeRTOS消息队列的使用,我不从理论开始介绍,直接用起来,然后从发现的问题分析记录解决。
..补充RAM空间不足问题内容,增加FreeRTOS任务占用的RAM空间说明
..完善FreeRTOS任务占用内存大小说明
..数据接收处理部分增加 缓存数组大小问题
..RAM空间不足问题章节 开头部分增加小结
前言
说明:FreeRTOS 专栏与我的 RT-Thread 专栏不同,我的 RT-Thread 专栏是从理论学习一步一步循序渐进,从 0 起步的 完整教学,而 FreeRTOS 更偏向于 我直接拿来使用,需要用到什么,然后引出知识点,在使用中发现问题,解然后再解决问题。
FreeRTOS记录(一、熟悉开发环境以及CubeMX下FreeRTOS配置)
FreeRTOS 记录(二、FreeRTOS 任务 API 认识和源码简析)
FreeRTOS 记录(三、RTOS 任务调度原理解析 _Systick、PendSV、SVC)(上)
FreeRTOS 记录(三、RTOS 任务调度原理解析 _Systick、PendSV、SVC)(下)
FreeRTOS记录(四、FreeRTOS任务堆栈溢出问题和临界区)
FreeRTOS记录(五、FreeRTOS任务通知)
1、创建消息队列
在CubemX中,操作如下:
 创建完毕生成代码,在代码中可以看到:
创建完毕生成代码,在代码中可以看到:
...
osThreadId enoecantaskHandle;
osMessageQId EnoceanQueueHandle;
...
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* Create the queue(s) */
/* definition and creation of EnoceanQueue */
osMessageQDef(EnoceanQueue, 100, uint8_t);
EnoceanQueueHandle = osMessageCreate(osMessageQ(EnoceanQueue), NULL);
...
osThreadDef(enoecantask, StartenoecanTask, osPriorityIdle, 0, 192);
enoecantaskHandle = osThreadCreate(osThread(enoecantask), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
__HAL_UART_ENABLE_IT(&hlpuart1,UART_IT_RXNE);
/* USER CODE END RTOS_THREADS */
在上面代码void MX_FREERTOS_Init(void)最后一部分我加入了__HAL_UART_ENABLE_IT(&hlpuart1,UART_IT_RXNE);
串口中断使能,开启串口接收。
为什么在MX_FREERTOS_Init最后加入串口中断使能,是为了防止先使能了串口中断,如果操作系统还没有开始调度之前有中断发送,在中断中有消息队列的入队处理,那么是有可能出问题的。
2、中断中发送消息
我们使用消息队列接收串口的数据,那么需要在stm32l0xx_it.c文件中相关串口的中断处理函数进行消息队列的入队操作:
stm32l0xx_it.c:
...
#include "cmsis_os.h"
...
/* USER CODE BEGIN EV */
extern osMessageQId EnoceanQueueHandle;
/* USER CODE END EV */
...
/**
* @brief This function handles LPUART1 global interrupt / LPUART1 wake-up interrupt through EXTI line 28.
*/
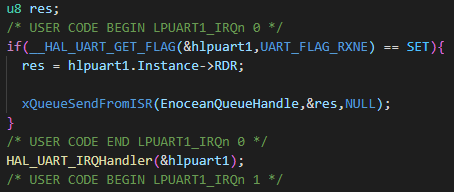
void LPUART1_IRQHandler(void)
{
u8 res;
/* USER CODE BEGIN LPUART1_IRQn 0 */
if(__HAL_UART_GET_FLAG(&hlpuart1,UART_FLAG_RXNE) == SET){
res = hlpuart1.Instance->RDR;
xQueueSendFromISR(EnoceanQueueHandle,&res,NULL);
}
/* USER CODE END LPUART1_IRQn 0 */
HAL_UART_IRQHandler(&hlpuart1);
/* USER CODE BEGIN LPUART1_IRQn 1 */
/* USER CODE END LPUART1_IRQn 1 */
}
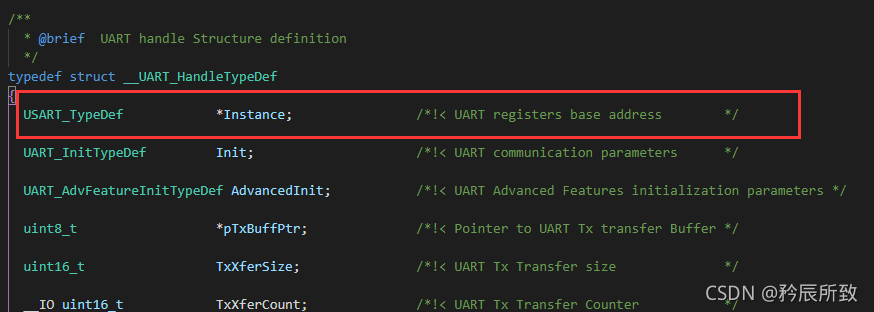
2.1 操作寄存器接收串口数据
上面代码中可以看到,使用的是M0 的内核,操作 ISR 和 RDR 寄存器:
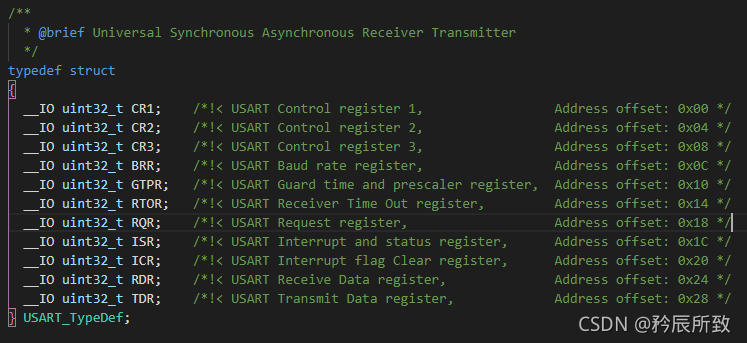
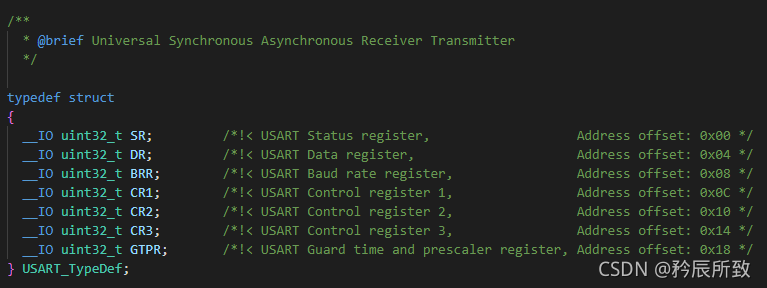
如果是M3、M4 的内核,操作 SR 和 DR 寄存器:
2.1 中断中入队
在串口中断中,使用了xQueueSendFromISR(EnoceanQueueHandle,&res,NULL);向消息队列中发送数据;
为什么使用xQueueSendFromISR而不用osMessagePut。
在CubeMX中,封装好的消息发送函数为osMessagePut,和其他一样,封装好的会自动判断是否在中断中发送,自动引用xQueueSendFromISR或者xQueueSend函数,源码如下:
/**
* @brief Put a Message to a Queue.
* @param queue_id message queue ID obtained with \ref osMessageCreate.
* @param info message information.
* @param millisec timeout value or 0 in case of no time-out.
* @retval status code that indicates the execution status of the function.
* @note MUST REMAIN UNCHANGED: \b osMessagePut shall be consistent in every CMSIS-RTOS.
*/
osStatus osMessagePut (osMessageQId queue_id, uint32_t info, uint32_t millisec)
{
portBASE_TYPE taskWoken = pdFALSE;
TickType_t ticks;
ticks = millisec / portTICK_PERIOD_MS;
if (ticks == 0) {
ticks = 1;
}
if (inHandlerMode()) {
if (xQueueSendFromISR(queue_id, &info, &taskWoken) != pdTRUE) {
return osErrorOS;
}
portEND_SWITCHING_ISR(taskWoken);
}
else {
if (xQueueSend(queue_id, &info, ticks) != pdTRUE) {
return osErrorOS;
}
}
return osOK;
}
但是注意!!!osMessagePut的第二个参数为uint32_t类型,所以只有当定义的消息Item Size 为 uint32_t 时候才能使用,否则消息会出错!
3、消息队列函数形参分析
3.1 关于 void *p
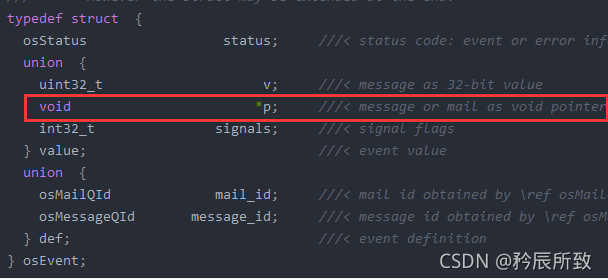
从源码可知,消息队列接收中定义了一个osEvent event;
osEvent osMessageGet (osMessageQId queue_id, uint32_t millisec)
{
portBASE_TYPE taskWoken;
TickType_t ticks;
osEvent event;
我们在上一篇文章
FreeRTOS记录(五、FreeRTOS任务通知) 中的二、任务通知使用 章节的 3、接收通知 小节 用到过osEvent类型,给出了结构体的定义。
其中结构体中关于 value 是一个联合体,比如如果是uint32_t 类型的数据,直接使用 value.v 读取,但如果是一个地址,而且可能是不同的数据类型,就得使用到 void *p :
同样的,我们在xQueueReceive和xQueueGenericSend里面,第二个形参也使用了void *类型:
BaseType_t xQueueReceive( QueueHandle_t xQueue, void * const pvBuffer, TickType_t xTicksToWait )
...
...
BaseType_t xQueueGenericSend( QueueHandle_t xQueue, const void * const pvItemToQueue, TickType_t xTicksToWait, const BaseType_t xCopyPosition )
这里要说明的是,void *可以指向任何类型的数据!
来看看我们经常使用的memset原型,是不是能更好的理解:
void *memset(void *s, int ch, size_t n);//将s中当前位置后面的n个字节 (typedef unsigned int size_t )用 ch 替换并返回 s
所以消息队列这里使用表示他可以发送和接收任意类型的数据,也就是消息类型,从简单的数据,到结构体,二维数组等消息都是可以传递的。
3.2 关于 void * const pvBuffer 和 const void * const pvItemToQueue
对于第一个void * const pvBuffer:
const 后面紧跟的是 pvBuffer , pvBuffer const 类型的,不可变(这里是指的某个地址不可变)但是 *pvBuffer 可变(该地址的数据是可变的)
消息队列接收的时候使用这个定义的形参;
对应的举个例子,如果是const void *pvBuffer:*pvBuffer 是const ,const 后面紧跟的是void,所以 *pvBuffer 可能是任意类型,但是这个数据不可变。
对于第二个const void * const pvItemToQueue:
pvItemToQueue 和 *pvItemToQueue 都是不可变的(这个地址不可变,这个地址上的数据不可变)
消息队列发送的时候使用这个定义实参;
4、数据接收处理
4.1 在任务中接收
在任务中接收消息,因为要保存到数组里面,使用了xQueueReceive函数:
...
uint8 USART_Enocean_BUF[100];
uint8 Enocean_Data = 0; //数据长度记录
...
/* USER CODE END Header_StartenoecanTask */
void StartenoecanTask(void const * argument)
{
/* USER CODE BEGIN StartenoecanTask */
/* Infinite loop */
for(;;)
{
if(xQueueReceive(EnoceanQueueHandle,&USART_Enocean_BUF[Enocean_Data++],portMAX_DELAY) == pdPASS){
while(xQueueReceive(EnoceanQueueHandle,&USART_Enocean_BUF[Enocean_Data++],15));
HAL_UART_Transmit(&huart1,USART_Enocean_BUF, Enocean_Data,0xFFFF); //将串口3接收到的数据通过串口1传出
memset(USART_Enocean_BUF,0,sizeof(USART_Enocean_BUF));
Enocean_Data=0;
}
// osDelay(1);
}
在CubeMX中,封装好的消息发送函数为osMessageGet,和其他一样,封装好的会自动判断是否在中断中,自动引用xQueueReceiveFromISR或者xQueueReceive函数,源码如下:
/**
* @brief Get a Message or Wait for a Message from a Queue.
* @param queue_id message queue ID obtained with \ref osMessageCreate.
* @param millisec timeout value or 0 in case of no time-out.
* @retval event information that includes status code.
* @note MUST REMAIN UNCHANGED: \b osMessageGet shall be consistent in every CMSIS-RTOS.
*/
osEvent osMessageGet (osMessageQId queue_id, uint32_t millisec)
{
portBASE_TYPE taskWoken;
TickType_t ticks;
osEvent event;
event.def.message_id = queue_id;
event.value.v = 0;
if (queue_id == NULL) {
event.status = osErrorParameter;
return event;
}
taskWoken = pdFALSE;
ticks = 0;
if (millisec == osWaitForever) {
ticks = portMAX_DELAY;
}
else if (millisec != 0) {
ticks = millisec / portTICK_PERIOD_MS;
if (ticks == 0) {
ticks = 1;
}
}
if (inHandlerMode()) {
if (xQueueReceiveFromISR(queue_id, &event.value.v, &taskWoken) == pdTRUE) {
/* We have mail */
event.status = osEventMessage;
}
else {
event.status = osOK;
}
portEND_SWITCHING_ISR(taskWoken);
}
else {
if (xQueueReceive(queue_id, &event.value.v, ticks) == pdTRUE) {
/* We have mail */
event.status = osEventMessage;
}
else {
event.status = (ticks == 0) ? osOK : osEventTimeout;
}
}
return event;
}
需要把数据保存至我们自己定义的数组中,所以使用了xQueueReceive函数。
然后等待15ms,确保收到的是一帧完整的数据。接收完一帧数据,通过串口1打印出来,然后清空数据。
4.2 数据解析
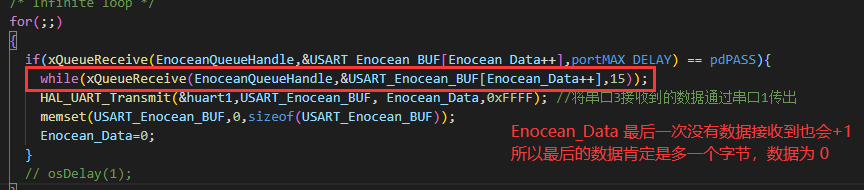
根据上面的代码,通过串口助手测试看看效果,发现有下面的问题,最后会多出来一位, 但是每次都是一帧数据正常发送(很简单的问题,仔细看一下代码就知道问题所在了):

问题的原因很简单,如下图:
然后数据解析函数直接用以前的驱动包,需要稍微修改一下函数:
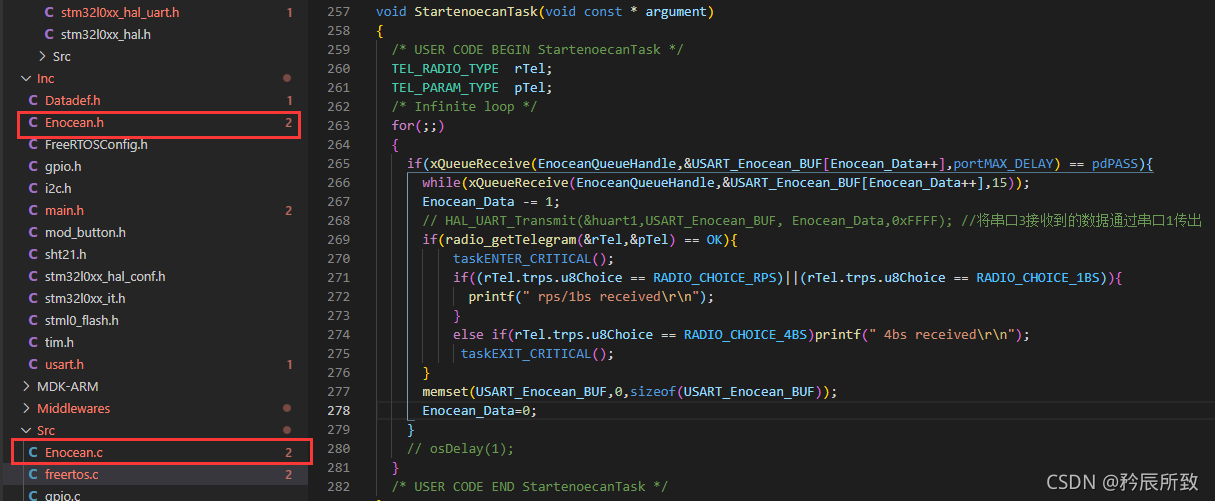
测试效果,成功:
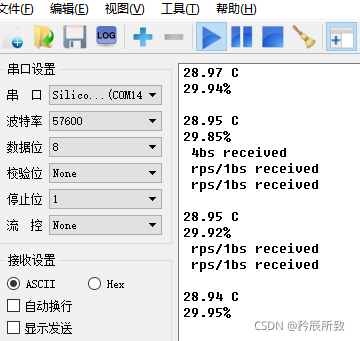
至此,使用消息队列 串口接收 不定长度的数据测试完成,结果也比较理想。
另外提一下,Enocean除了接收,发送可以直接用以前写好的函数,直接在需要的任务中调用:

4.3 缓存大小问题(未解决)
在测试中,本来为了解决RAM使用空间,想把USART_Enocean_BUF[100] 数组大小设置为50,因为最大的一帧数据也只有在读ID的时候44个字节,每次读取完成都会把数组清0。所以觉得数组 大小 50 足够使用了,但是实际上测试下来发现,50,甚至是80 90的数组大小都不够使用,接收任务会出问题,具体原因一下子还不明白。
这个缓存问题,按理来说,80、90字节 应该也够的,我试着把消息队列的大小也定义成缓存一样大大小,还是不行,这个问题后面如果发现再来补充!(未解决)
5 、RAM空间不足问题
内存空间不足 小结写在前面:
-
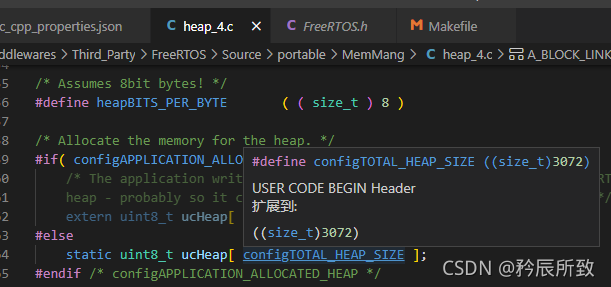
FreeRTOS定义的 TOTAL_HEAP_SIZE,直接在内存占用这么大的空间,编译过后的.bss段直接增加对应大小;

-
系统的Minimum Heap Size 和 Minimum Stack Size ,(也可以认为)直接需要占用这么大的空间;


- 如果 FreeRTOS 使能了定时器,定时器启动以后会有一个任务:
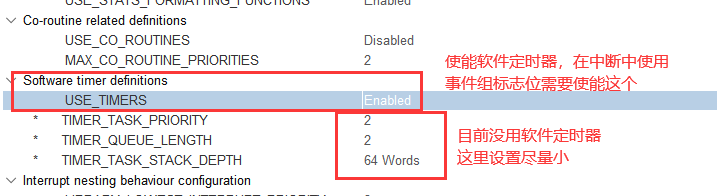
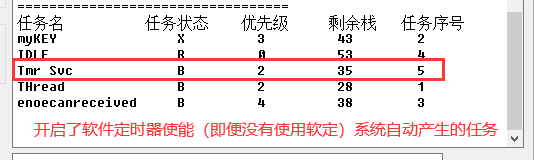
虽然前面申请了 TOTAL_HEAP_SIZE 空间,图中这个任务Tmr Svc会占用TOTAL_HEAP_SIZE 空间内容
<font color=#FF0033> 注意!!除了任务所占用的申请过的空间不用计算内存,开启软件定时器之后还会额外占用.bss段

Include definitions里面使能了需要的定义,需要占用一点.bss段
- 消息队列肯定也是要占用额外的.bss段的(这里已经使用上了,我就不重新去改掉,后面遇到再来维护)


5.1问题的出现
这次测试使用的是STM32L051C8,8KB的RAM,64KB的Flash,Flash还是够用的,但是8KB的RAM使用起来就有点捉襟见肘,在中途编译的时候就已经发现:


具体如何计算我有一篇博文单独介绍 内存问题:STM32的内存管理相关(内存架构,内存管理,map文件分析),包括本文后面的一些分析内存部分,也需要参考上面这篇博文的内容。
果然,在接下来RAM空间不够了:

原因是由于我发现 FreeRTOS 内存可用字节数不够了:

于是我把 FreeRTOS 可用的内存空间TOTAL_HEAP_SIZE修改大了:

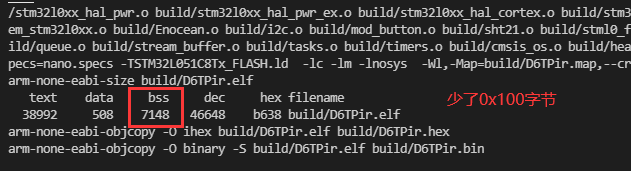
我改大了 1KB, 开始我们编译已经看到用了大概7.7KB,所以这么一加上去,RAM空间不够用,提示溢出 616 bytes,
那么我试一下,如果我减少 200 bytes,那么他编译溢出是不是就只有 416 bytes了:
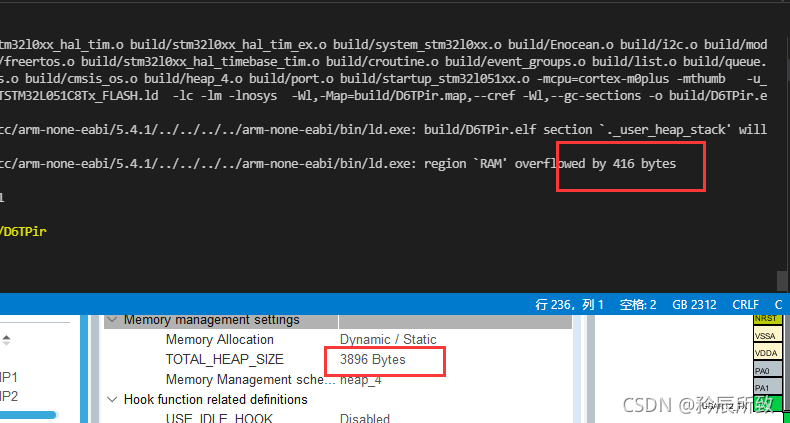
确实如此,但是注意!!!这个值需要是1024 的倍数,这是只是单纯分配大小测试 RAM的占用情况
那么在小容量的MCU上运行 RTOS,我们就得非常注意这个内存空间的使用,应该合理的划分了,那么如何能够合理的划分内存空间,除了需要知道 STM32的内存管理相关 的内容,还需要对FreeRTOS任务如何占用内存空间需要一定的了解。
5.2 FreeRTOS任务占用的RAM空间
通过上面我们知道,FreeRTOS TOTAL_HEAP_SIZE是直接在RAM里面划分空间的,那么这个TOTAL_HEAP_SIZE占用的空间是在RAM的什么位置呢?
如果了解 FreeRTOS 任务创建原理相关的知识,这点不难回答,我们这里可以用一种简单的办法告诉答案,通过.map文件,还是在 STM32的内存管理相关(内存架构,内存管理,map文件分析)文章中最后一节,GCC下.map文件中有相关解释,这里再次说明一遍:
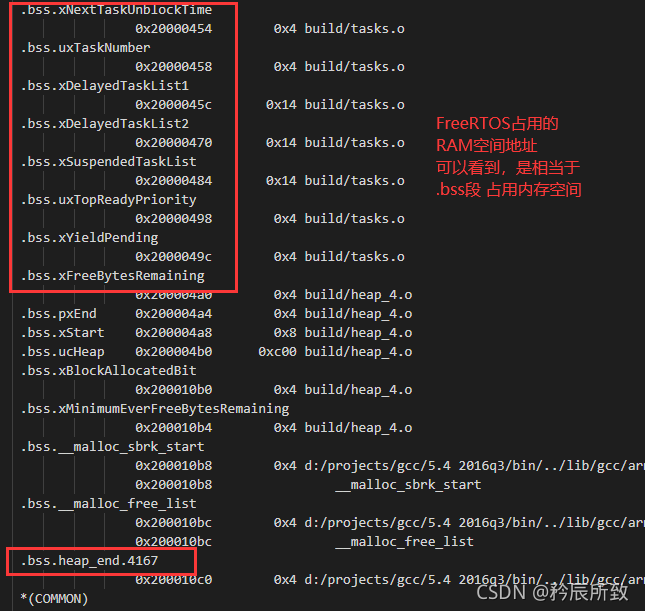
在Cubemx中设置的TOTAL_HEAP_SIZE大小,直接占用的是上图部分RAM空间的大小,结尾的地方是.bss.heap_end.4167 0x200010c0 。
FreeRTOS 每一个任务都在这个开辟 ,我们选中的是heap_4.c内存管理方案,在heap_4.c文件里面是有申请内存的操作:

我们这里需要说明的是,FreeRTOS申请的内存空间在RAM的位置属于.bss段,FreeRTOS创建的每个任务都是在开始申请的这段内存空间中创建的,每个FreeRTOS任务在这段空间中都有自己的栈空间。
在创建任务的时候我们申请的任务大小就是申请任务的栈空间,但是这个栈空间与系统的栈空间是不一样的,在.map文件的最后:

系统的栈空间是用来处理中断发生,系统函数调用的现场保存的,而FreeRTOS的任务有每个任务单独的自己的栈空间来保存任务的现场,不要搞混淆了。
简单画了一张图:

5.3 问题的解决办法
那既然遇到这个问题,该如何解决呢?
5.3.1 修改系统Heap Size
首先我们得知道内存分配的相关知识,我们知道 系统的堆空间 Heap Size 默认0x200,而且在程序中如果基本不用malloc动态分配空间,那么这个 Heap Size 是可以不用的,但是不能粗暴的设置为0,部分C库函数还要用,一定要分配一定大小。

5.3.2 了解FreeRTOS任务占用大小计算
除了修改Heap Size,FreeRTOS任务的大小和任务的分配需要好好考虑一下,可以在产品测试的时候先通过vTaskList查看每个任务需要使用的内存大小,再确定分配多少内存,如何查看,请参考另一篇博文:
FreeRTOS记录(四、FreeRTOS任务堆栈溢出问题和临界区)
这里直接给个说明:
FreeRTOS任务占用内存大小 取决于 局部变量 和 调用深度。
学会合理的分配内存空间是很有必要的,FreeRTOS 消息队列 用作串口通讯的测试就到这里,后续有关系消息队列的知识再来补充。

- 点赞
- 收藏
- 关注作者
评论(0)