[Python图像处理] 十二.图像几何变换之图像仿射变换、图像透视变换和图像校正

前面的第六篇文章讲解了图像缩放、图像旋转、图像翻转和图像平移的几何变换,本篇文章主要讲解图像仿射变换和图像透视变换,通过Python调用OpenCV函数实。基础性知识希望对您有所帮助。
- 1.图像仿射变换
- 2.图像透视变换
- 3.基于图像透视变换的图像校正
- 4.图像几何变换总结
PS:文章参考自己以前系列图像处理文章及OpenCV库函数,同时,本篇文章涉及到《计算机图形学》基础知识,请大家下来补充。
该系列在github所有源代码:
前文参考:
- [Python图像处理] 九.形态学之图像开运算、闭运算、梯度运算
- [Python图像处理] 十.形态学之图像顶帽运算和黑帽运算
- [Python图像处理] 十一.灰度直方图概念及OpenCV绘制直方图
- [Python图像处理] 十二.图像几何变换之图像仿射变换、图像透视变换和图像校正
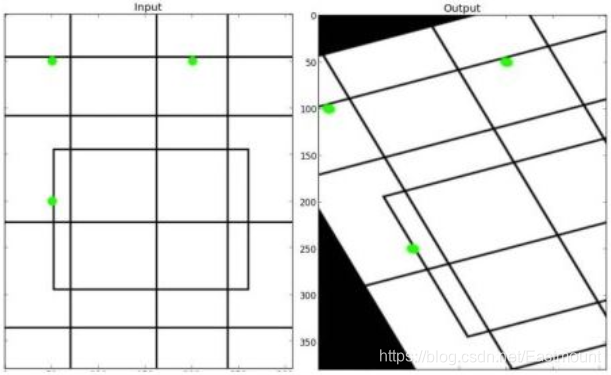
图像仿射变换又称为图像仿射映射,是指在几何中,一个向量空间进行一次线性变换并接上一个平移,变换为另一个向量空间。通常图像的旋转加上拉升就是图像仿射变换,仿射变换需要一个M矩阵实现,但是由于仿射变换比较复杂,很难找到这个M矩阵.
OpenCV提供了根据变换前后三个点的对应关系来自动求解M的函数——cv2.getAffineTransform(pos1,pos2),其中pos1和pos2表示变换前后的对应位置关系,输出的结果为仿射矩阵M,接着使用函数cv2.warpAffine()实现图像仿射变换。图5-14是仿射变换的前后效果图。
图像仿射变换的函数原型如下:
M = cv2.getAffineTransform(pos1,pos2)
- pos1表示变换前的位置
- pos2表示变换后的位置
cv2.warpAffine(src, M, (cols, rows))
- src表示原始图像
- M表示仿射变换矩阵
- (rows,cols)表示变换后的图像大小,rows表示行数,cols表示列数
实现代码如下所示:
#encoding:utf-8
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图片
src = cv2.imread('test.bmp')
#获取图像大小
rows, cols = src.shape[:2]
#设置图像仿射变换矩阵
pos1 = np.float32([[50,50], [200,50], [50,200]])
pos2 = np.float32([[10,100], [200,50], [100,250]])
M = cv2.getAffineTransform(pos1, pos2)
#图像仿射变换
result = cv2.warpAffine(src, M, (cols, rows))
#显示图像
cv2.imshow("original", src)
cv2.imshow("result", result)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
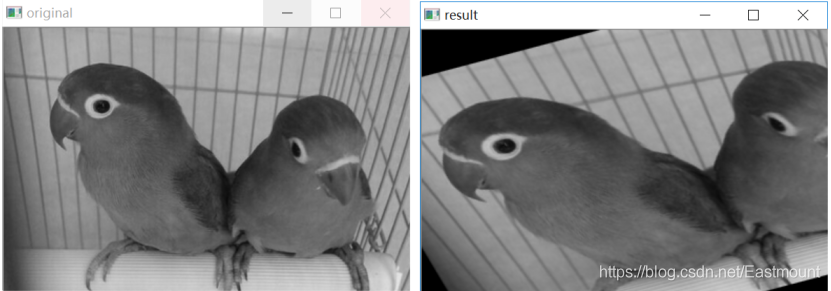
输出效果图如下所示:
图像透视变换(Perspective Transformation)的本质是将图像投影到一个新的视平面,同理OpenCV通过函数cv2.getPerspectiveTransform(pos1,pos2)构造矩阵M,其中pos1和pos2分别表示变换前后的4个点对应位置。得到M后在通过函数cv2.warpPerspective(src,M,(cols,rows))进行透视变换。
图像透视变换的函数原型如下:
M = cv2.getPerspectiveTransform(pos1, pos2)
- pos1表示透视变换前的4个点对应位置
- pos2表示透视变换后的4个点对应位置
cv2.warpPerspective(src,M,(cols,rows))
- src表示原始图像
- M表示透视变换矩阵
- (rows,cols)表示变换后的图像大小,rows表示行数,cols表示列数
代码如下:
#encoding:utf-8
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图片
src = cv2.imread('test01.jpg')
#获取图像大小
rows, cols = src.shape[:2]
#设置图像透视变换矩阵
pos1 = np.float32([[114, 82], [287, 156], [8, 322], [216, 333]])
pos2 = np.float32([[0, 0], [188, 0], [0, 262], [188, 262]])
M = cv2.getPerspectiveTransform(pos1, pos2)
#图像透视变换
result = cv2.warpPerspective(src, M, (190, 272))
#显示图像
cv2.imshow("original", src)
cv2.imshow("result", result)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
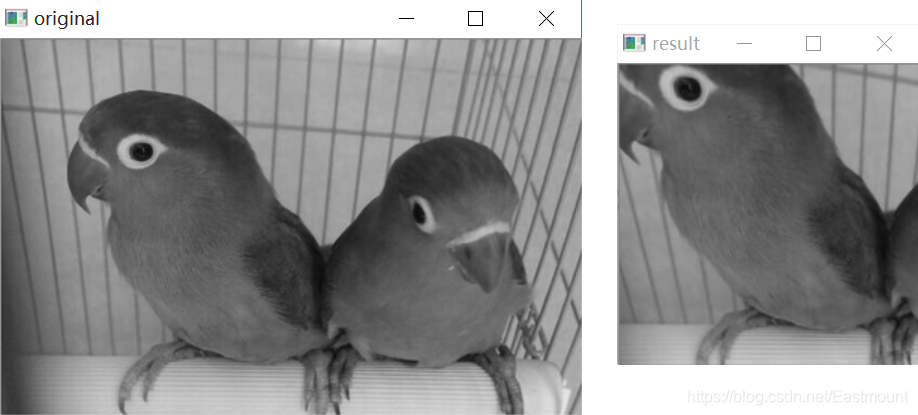
输出结果如下图所示:
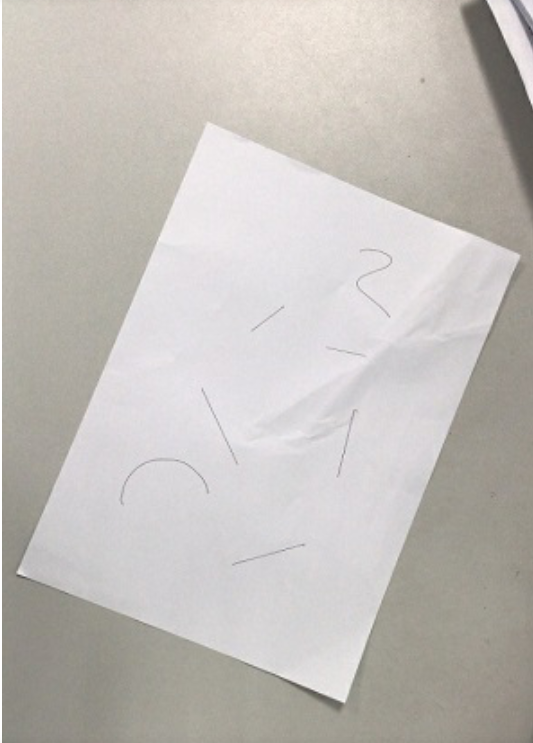
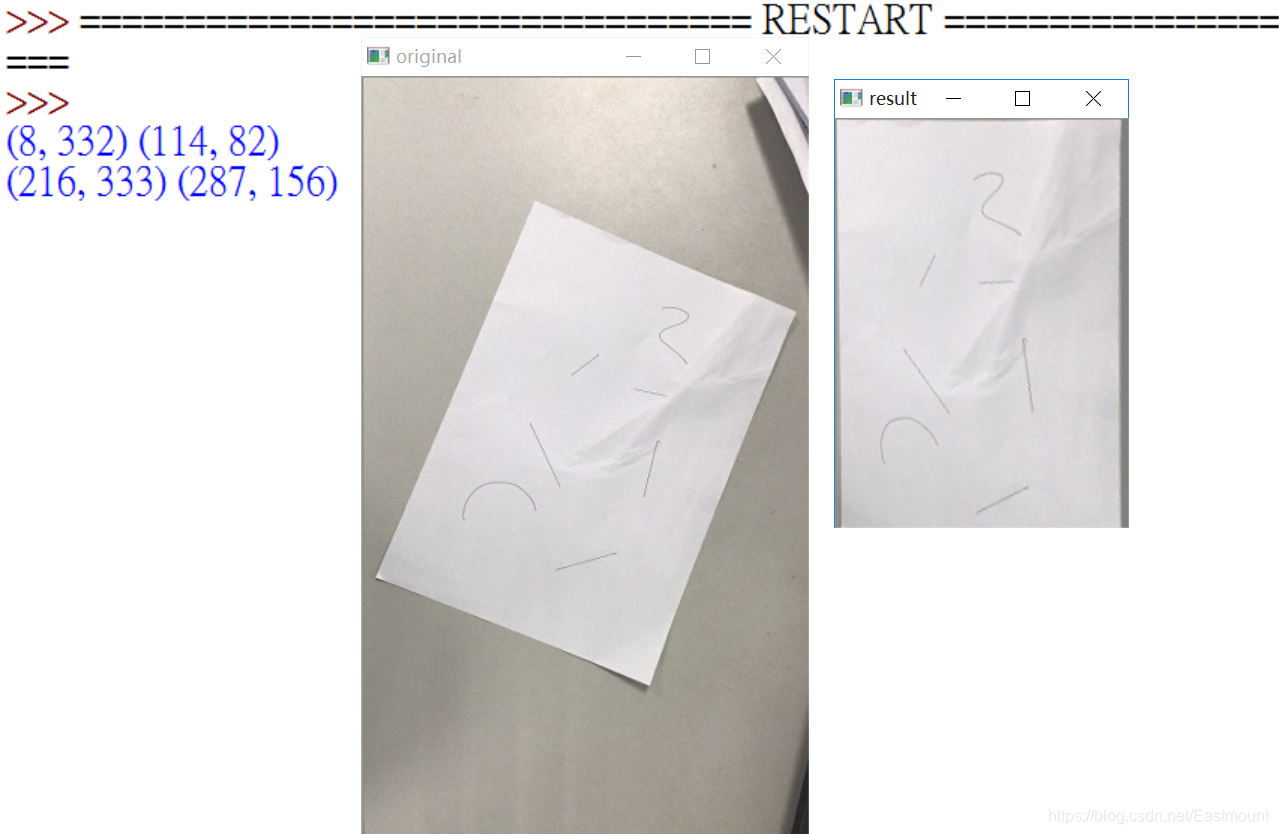
下面参考 t6_17大神 的文章,通过图像透视变换实现图像校正功能。
假设现在存在一张A4纸图像,现在需要通过调用图像透视变换校正图像。
代码如下所示:
#encoding:utf-8
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图片
src = cv2.imread('test01.jpg')
#获取图像大小
rows, cols = src.shape[:2]
#将源图像高斯模糊
img = cv2.GaussianBlur(src, (3,3), 0)
#进行灰度化处理
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
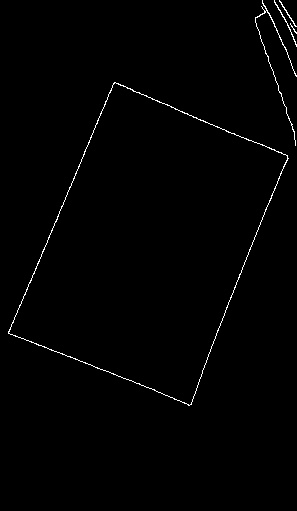
#边缘检测(检测出图像的边缘信息)
edges = cv2.Canny(gray,50,250,apertureSize = 3)
cv2.imwrite("canny.jpg", edges)
#通过霍夫变换得到A4纸边缘
lines = cv2.HoughLinesP(edges,1,np.pi/180,50,minLineLength=90,maxLineGap=10)
#下面输出的四个点分别为四个顶点
for x1,y1,x2,y2 in lines[0]:
print(x1,y1),(x2,y2)
for x1,y1,x2,y2 in lines[1]:
print(x1,y1),(x2,y2)
#绘制边缘
for x1,y1,x2,y2 in lines[0]:
cv2.line(gray, (x1,y1), (x2,y2), (0,0,255), 1)
#根据四个顶点设置图像透视变换矩阵
pos1 = np.float32([[114, 82], [287, 156], [8, 322], [216, 333]])
pos2 = np.float32([[0, 0], [188, 0], [0, 262], [188, 262]])
M = cv2.getPerspectiveTransform(pos1, pos2)
#图像透视变换
result = cv2.warpPerspective(src, M, (190, 272))
#显示图像
cv2.imshow("original", src)
cv2.imshow("result", result)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果如下图所示:
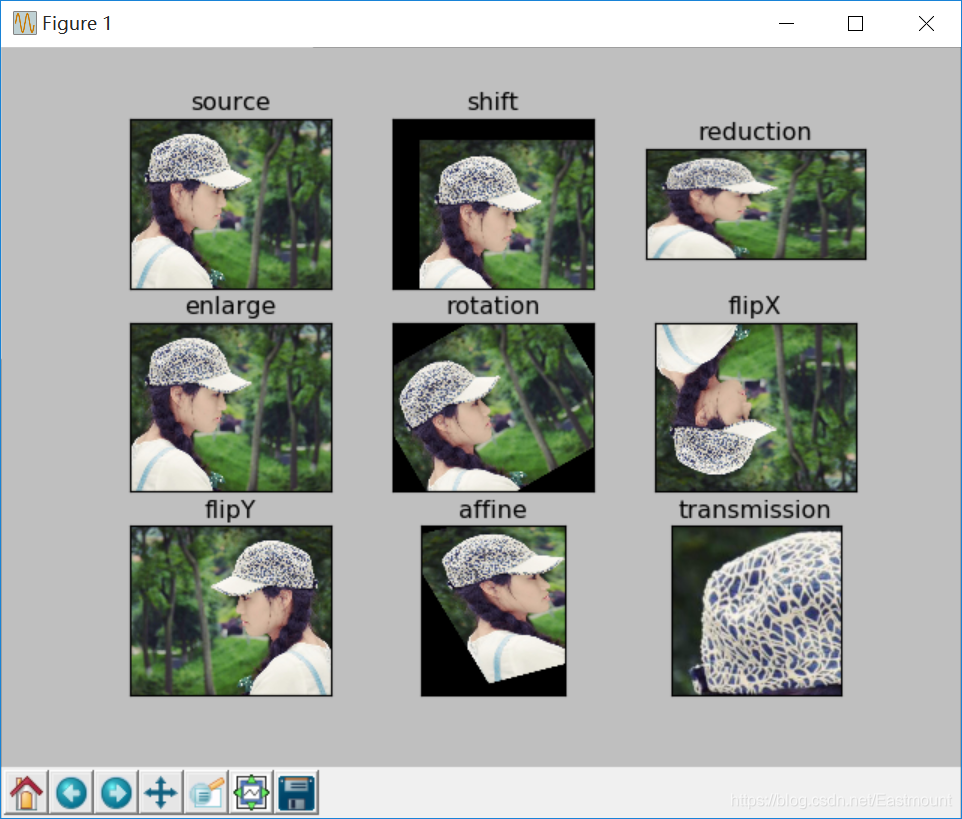
最后补充图像几何代码所有变换,希望读者能体会下相关的代码,并动手实践下。输出结果以女神为例:
完整代码如下:
#encoding:utf-8
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图片
img = cv2.imread('test3.jpg')
image = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#图像平移矩阵
M = np.float32([[1, 0, 80], [0, 1, 30]])
rows, cols = image.shape[:2]
img1 = cv2.warpAffine(image, M, (cols, rows))
#图像缩小
img2 = cv2.resize(image, (200,100))
#图像放大
img3 = cv2.resize(image, None, fx=1.1, fy=1.1)
#绕图像的中心旋转
#源图像的高、宽 以及通道数
rows, cols, channel = image.shape
#函数参数:旋转中心 旋转度数 scale
M = cv2.getRotationMatrix2D((cols/2, rows/2), 30, 1)
#函数参数:原始图像 旋转参数 元素图像宽高
img4 = cv2.warpAffine(image, M, (cols, rows))
#图像翻转
img5 = cv2.flip(image, 0) #参数=0以X轴为对称轴翻转
img6 = cv2.flip(image, 1) #参数>0以Y轴为对称轴翻转
#图像的仿射
pts1 = np.float32([[50,50],[200,50],[50,200]])
pts2 = np.float32([[10,100],[200,50],[100,250]])
M = cv2.getAffineTransform(pts1,pts2)
img7 = cv2.warpAffine(image, M, (rows,cols))
#图像的透射
pts1 = np.float32([[56,65],[238,52],[28,237],[239,240]])
pts2 = np.float32([[0,0],[200,0],[0,200],[200,200]])
M = cv2.getPerspectiveTransform(pts1,pts2)
img8 = cv2.warpPerspective(image,M,(200,200))
#循环显示图形
titles = [ 'source', 'shift', 'reduction', 'enlarge', 'rotation', 'flipX', 'flipY', 'affine', 'transmission']
images = [image, img1, img2, img3, img4, img5, img6, img7, img8]
for i in xrange(9):
plt.subplot(3, 3, i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
感恩能与大家在华为云遇见!
希望能与大家一起在华为云社区共同成长,原文地址:https://blog.csdn.net/Eastmount/article/details/88679772
(By:娜璋之家 Eastmount 2021-08-13 夜于贵阳)
参考文献:
- 点赞
- 收藏
- 关注作者
评论(0)