ROS2机器人个人教程博客汇总(2021共6套)

【摘要】
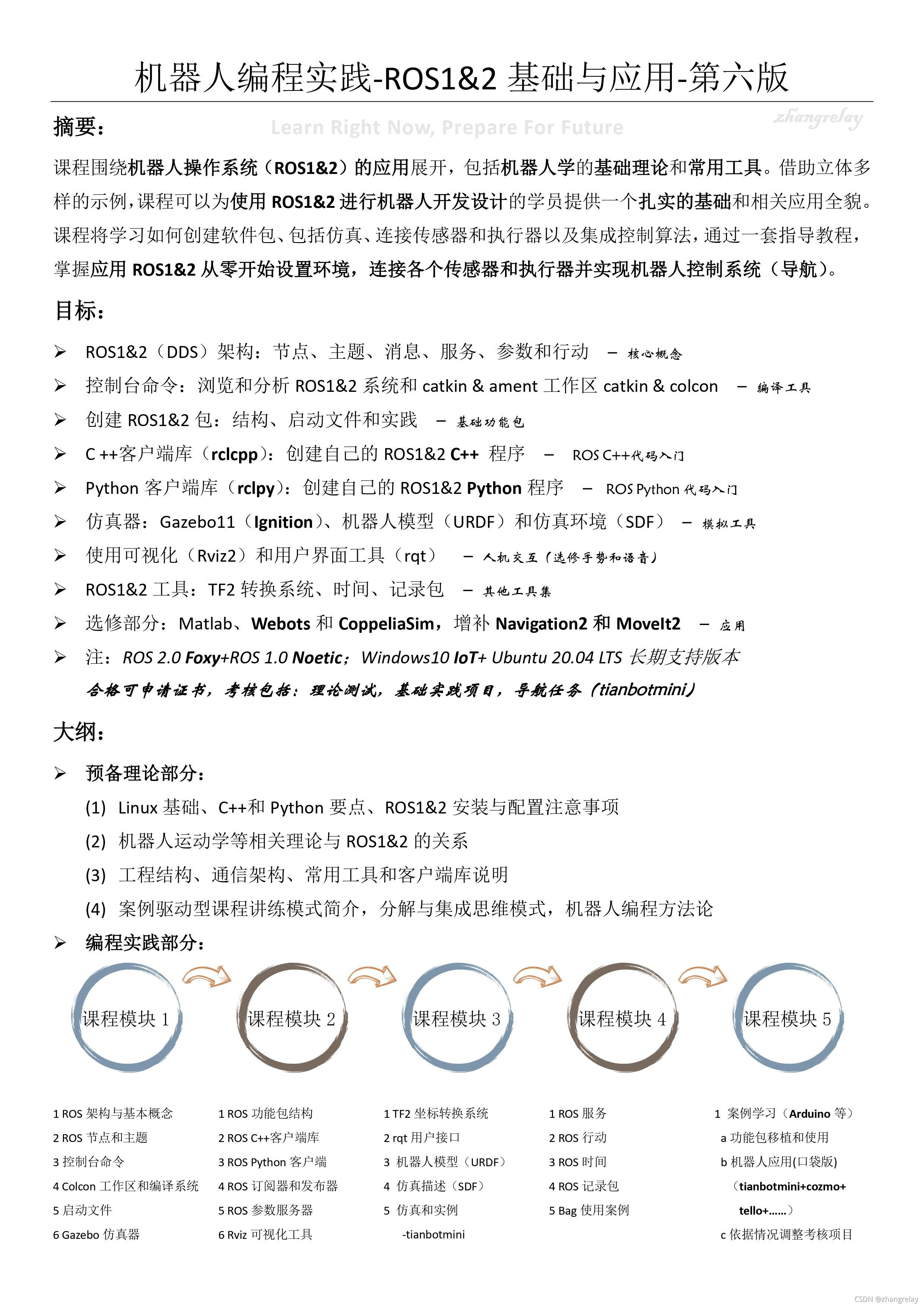
从Dashing开始正式开课,到现在用Foxy进行教学。博客零散,现在汇总一下,今后不再以ROS2为主进行博客更新(适用于应用型本科的课程建设理论和实践部分已经全部完成)改为具体应用领域为主(服务机器人主题/自动驾驶主题/人工智能主体/多机器人主题等)。
最新版课程总结(博客教程与学校课程并不一致,差异化更新):
ROS2机器人实...
从Dashing开始正式开课,到现在用Foxy进行教学。博客零散,现在汇总一下,今后不再以ROS2为主进行博客更新(适用于应用型本科的课程建设理论和实践部分已经全部完成)改为具体应用领域为主(服务机器人主题/自动驾驶主题/人工智能主体/多机器人主题等)。
最新版课程总结(博客教程与学校课程并不一致,差异化更新):
2017年开启ROS1和ROS2混合教学(零突破):
大量更新自Dashing版本发布后:
2019年(第1套):
-
原创 机器人操作系统二(ROS2)- 启程 Departure
-
原创 机器人操作系统二(ROS2)- 修行 Taoism
-
原创 机器人操作系统二(ROS2)- 仿真 Simulation
-
原创 机器人操作系统二(ROS2)- 实践 Practice
-
原创 沉迷机器人操作系统的一个理由和四种修仙秘籍(更新ROS 2.0内容)
依据官方文档的基础内容博客就不列举了,都在ROS2课程专栏中:
2020年(第2套):
-
原创 机器人实践课程镜像分享及使用说明(Arduino+ROS1+ROS2+Gazebo+SLAM+...)
-
原创 使用机器人操作系统ROS 2和仿真软件Gazebo 9搭建机器人教程(一)
-
原创 使用机器人操作系统ROS 2和仿真软件Gazebo 9命令遥控可视化教程(二)
-
原创 使用机器人操作系统ROS 2和仿真软件Gazebo 9环境综合测试教程(三)
-
原创 使用机器人操作系统ROS 2和仿真软件Gazebo 9目标跟踪实践(四)
-
原创 使用机器人操作系统ROS 2和仿真软件Gazebo 9多机器人实践(五)
-
原创 使用机器人操作系统ROS 2和仿真软件Gazebo 9激光传感器算法进阶(六)
-
原创 使用机器人操作系统ROS 2和仿真软件Gazebo 9主题进阶实战(七)- mobot速度发布与里程计订阅
-
原创 使用机器人操作系统ROS 2和仿真软件Gazebo 9服务进阶实战(八)- mobot行驶至目标位置
-
原创 使用机器人操作系统ROS 2和仿真软件Gazebo 9行动进阶实战(九)- mobot区域巡逻
2021年(第3套):
-
原创 webots和ros2笔记01-资料
-
原创 webots和ros2笔记02-启程
-
原创 webots和ros2笔记03-解析
-
原创 webots和ros2笔记04-入城
-
原创 webots和ros2笔记05-新建
-
原创 webots和ros2笔记06-王者(turtlebot3)
-
原创 webots和ros2笔记07-建国(turtlebot3)
-
原创 webots和ros2笔记08-分封
2021年(第4套):
-
ROS2极简总结-核心概念(一)
-
ROS2极简总结-核心概念(二)
-
ROS2极简总结-新增概念
-
ROS2极简总结-文件系统
-
ROS2极简总结-命令行接口基础
-
ROS2极简总结-MoveIt2
-
ROS2极简总结-导航简介-自定位
-
ROS2极简总结-坐标变换-TF
-
ROS2极简总结-SLAM
-
ROS2极简总结-Nav2-行为树
-
ROS2极简总结-Nav2-地图和自适应蒙特卡洛定位
-
ROS2极简总结-Nav2-概述(上)规划器
-
ROS2极简总结-Nav2-概述(中)控制器
-
ROS2极简总结-Nav2-概述(下)恢复器
长期更新2016-2021,ROS1-ROS2-indigo-kinetic-melodic-noetic-dashing-foxy6版(第5套):
2021年趣味编程系列,只更新了前20篇(第6套):
-
机器人编程趣味实践01-简要介绍
-
机器人编程趣味实践02-程序(Hello World)
-
机器人编程趣味实践03-运算(+ - × ÷)
-
机器人编程趣味实践04-逻辑判断(if)
-
机器人编程趣味实践05-二维图形化仿真(turtlesim)
-
机器人编程趣味实践06-程序(节点)
-
机器人编程趣味实践07-信息交互(主题)
-
机器人编程趣味实践08-任务请求回复(服务)
-
机器人编程趣味实践09-多彩背景(参数)
-
机器人编程趣味实践10-做个任务(行动)
-
机器人编程趣味实践11-图形化调试工具(rqt)
-
机器人编程趣味实践12-启动工具(launch)
-
机器人编程趣味实践13-数据保存和播放(bag)
-
机器人编程趣味实践14-机器人三维仿真(Gazebo+TurtleBot3)
-
机器人编程趣味实践15-遥控到自动(AutoAvoidObstacles)
-
机器人编程趣味实践16-同步定位与地图构建(SLAM)
-
机器人编程趣味实践17-混乱的记忆-
-
机器人编程趣味实践18-他山之石(功能包)
-
机器人编程趣味实践19-武林秘籍(文档)
-
机器人编程趣味实践20-版本课程(教学)
- ……
文章来源: zhangrelay.blog.csdn.net,作者:zhangrelay,版权归原作者所有,如需转载,请联系作者。
原文链接:zhangrelay.blog.csdn.net/article/details/120062413

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)