使用ORBSLAM2进行kineticV2稠密建图,实时转octomap建图以及导航

决定总结最近一个月的工作,这个月在orbslam2的基础上,使用kineticV2完成了稠密点云地图的重建,实现了点云的回环,并使用octomap转换成实时的八叉树地图,导航部分已经有了思路,打算下个月所一个基于octomap的航迹生成能用在视觉的导航上。
一、传感器和依赖包安装
PC性能:Dell xps13 内存16GB 硬盘SSD:500GB 显卡:Intel iris集显
操作系统:ubuntu16.04 ROS:kinetic版本
依赖库版本:eigen3.1.2 、pcl-1.7、opencv3.2、vtk6.2、octomap1.9、
安装顺序:
1、先安装eigen3.1.2(涉及到很多东西,所以先解决eigen问题)
2、安装pcl1.7、再安装opencv3.2
3、安装kineticV2的libfreenect2、iai_kinect2
4、最后安装octomap
安装eigen3.1.2
cd eigen-eigen-5097c01bcdc4
mkdir build &&cd build
cmake ..
sudo make install
查看eigen版本
pkg-config --modversion eigen3
注:安装eigen不要更改安装路径,这样更换版本时可以自动覆盖原来的路径
2、pcl
本代码使用pcl-1.7版本开发,删除其他版本pcl
locate pcl查看其他版本的pcl安装在哪里,一般存于像/usr/local/share/pcl-1.8 、/usr/local/lib/pkgconfig/等区域,sudo rm -rf 文件路径删除。
例:
sudo rm -rf /usr/local/share/pcl-1.8 /usr/local/lib/pkgconfig/pcl*
locate pcl后如果还有这个文件,打开文件夹的形式打开到那个目录下再看看。有时候多余文件夹或文件已经删了,但是通过命令行locate的还是会有。
cd pcl-pcl-1.7.2
mkdir build&&cd build
cmake ..
make -j8 (编译大概30分钟)
sudo make install
编译有问题的话百度下,基本上都是eigen或者各种依赖库版本不对导致的。
3、下载安装libfreenect(Kinect开源驱动)
安装方式参考https://github.com/OpenKinect/libfreenect2
git clone https://github.com/OpenKinect/libfreenect2.git
cd libfreenect2
sudo apt-get install build-essential cmake pkg-config
sudo apt-get install libusb-1.0-0-dev
sudo apt-get install libturbojpeg libjpeg-turbo8-dev
sudo apt-get install libglfw3-dev
sudo apt-get install libopenni2-dev
cd ..
mkdir build && cd build
cmake .. -DCMAKE_INSTALL_PREFIX=$HOME/freenect2
make
make install
设定udev rules:
libfreenect2目录下执行
sudo cp ../platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/
重新插拔设备
运行Demo程序: libfreenect2目录下执行 ./build/bin/Protonect, 不出意外, 应该能够看到如下效果:
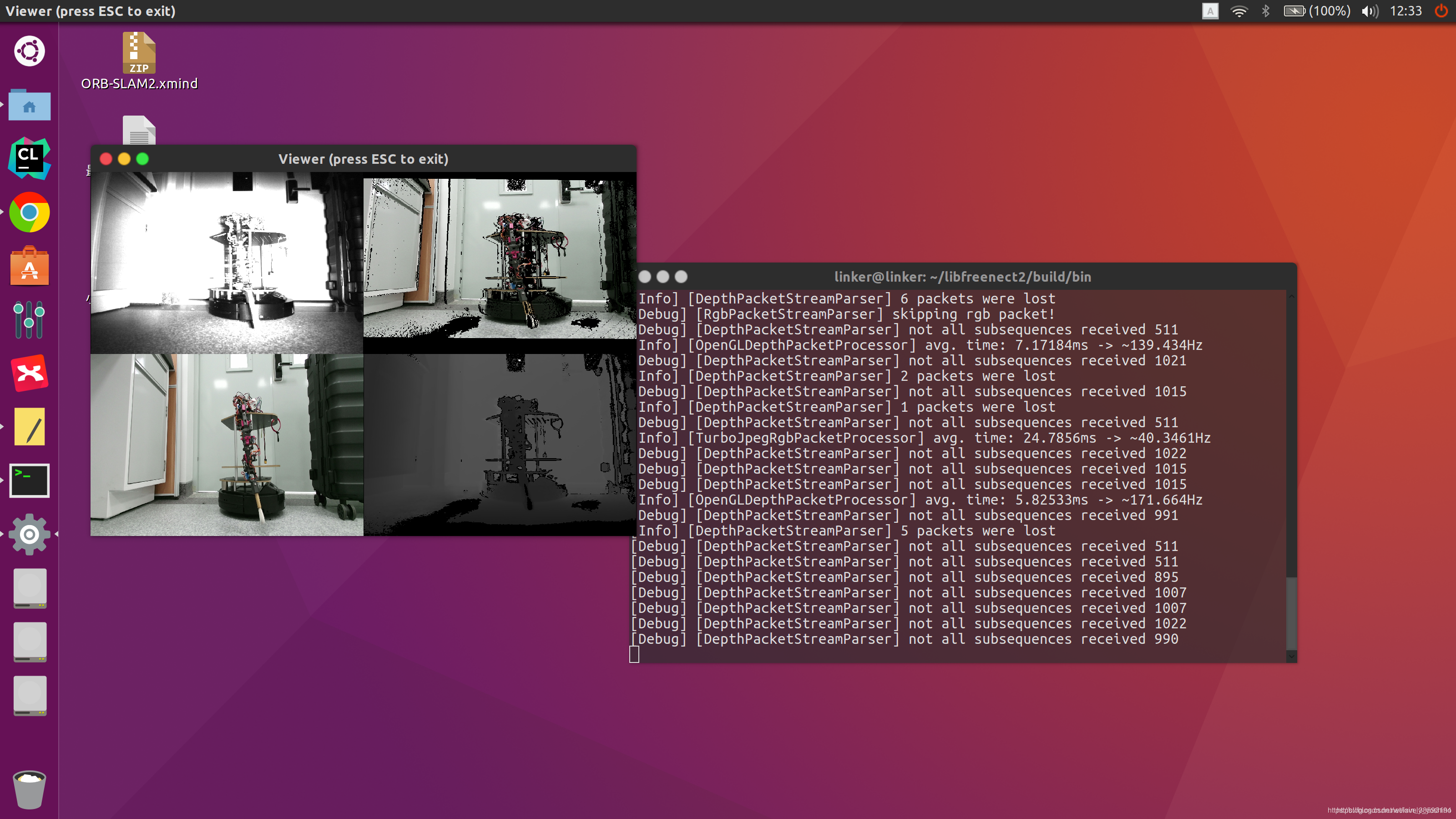
注意:这里要分别测测cpu、opengl、opencl模型下的情况
./build/bin/Protonect cpu
./build/bin/Protonect gl
./build/bin/Protonect cl
尤其是使用opengl和opencl跑的,NVIDIA和Intel需要先安装NVIDIA的cuda后再执行,opencl执行不过关会影响后面iai_kinect2安装后执行roslaunch kinect2_bridge kinect2_bridge.launch的效果,这里我们先测一下,只要有图像就行,如果gl、或者cl执行不出来问题先保留,在iai_kinect2安装后再给出对应解决方案。
4、iai_kinect2
利用命令行从Github上面下载工程源码到工作空间内src文件夹内:
cd ~/catkin_ws/src/
git clone https://github.com/code-iai/iai_kinect2.git
cd iai_kinect2
rosdep install -r --from-paths .
cd ~/catkin_ws
catkin_make -DCMAKE_BUILD_TYPE="Release"
安装iai-kinect2操作这一步"rosdep install -r --from-paths 出现错误
ERROR: the following packages/stacks could not have their rosdep keys resolved
to system dependencies:
kinect2_viewer: Cannot locate rosdep definition for [kinect2_bridge]
kinect2_calibration: Cannot locate rosdep definition for [kinect2_bridge]
kinect2_bridge: Cannot locate rosdep definition for [kinect2_registration]
Continuing to install resolvable dependencies…
解决办法:命令改写为:
rosdep install --from-paths ~/catkin_ws/src/iai_kinect2 --ignore-src -r
执行下面命令查看能否正常执行kineticV2
roslaunch kinect2_bridge kinect2_bridge.launch
如果安装正常是可以执行的,
…
[ INFO] [1565591147.113376730]: [DepthRegistration::New] Using CPU registration method!
[ INFO] [1565591147.113685492]: [DepthRegistration::New] Using CPU registration method!
[ INFO] [1565591147.192329239]: [Kinect2Bridge::main] waiting for clients to connect
这里最后一行显示等待客户端连接,这个是正常的,因为会产生大量的计算量,因此默认不会自动打开显示窗口,
执行rostopic list明显看到是有话题的,当订阅相关话题时才会有数据。执行:
rosrun rviz rviz
左下角add —— image 在Image Topic中选/kinect2/qhd/image_color_rect ,可以看到图像,则kinect2可以正常使用了
5、出错排雷
好,关于kineticV2该安装的都安装完了,接下来我讲讲我遇到过的问题,供各位朋友们参考
a、其实我遇到的核心问题就是双显卡状态下,cl不能执行的问题。一开始在我的台式机(双显卡)上执行./build/bin/Protonect cl,报错,找不到opencl设备;执行roslaunch kinect2_bridge kinect2_bridge.launch。报错如下:
[ INFO] [1565590436.239968384]: [DepthRegistration::New] Using OpenCL registration method!
[ INFO] [1565590436.240130258]: [DepthRegistration::New] Using OpenCL registration method!
beignet-opencl-icd: no supported GPU found, this is probably the wrong opencl-icd package for this hardware
(If you have multiple ICDs installed and OpenCL works, you can ignore this message)
[ INFO] [1565590436.245914876]: [DepthRegistrationOpenCL::init] devices:
[ERROR] [1565590436.245966385]: [DepthRegistrationOpenCL::init] could not find any suitable device
[Info] [Freenect2DeviceImpl] closing…
[Info] [Freenect2DeviceImpl] releasing usb interfaces…
[Info] [Freenect2DeviceImpl] deallocating usb transfer pools…
[Info] [Freenect2DeviceImpl] closing usb device…
[Info] [Freenect2DeviceImpl] closed
[ERROR] [1565590436.247492556]: [Kinect2Bridge::start] Initialization failed!
…
[Error] [OpenCLDepthPacketProcessorImpl] OpenCLDepthPacketProcessor is not initialized!
[Error] [OpenCLDepthPacketProcessorImpl] OpenCLDepthPacketProcessor is not initialized!
[Error] [OpenCLDepthPacketProcessorImpl] OpenCLDepthPacketProcessor is not initialized!
[Info] [Freenect2DeviceImpl] submitting rgb transfers…
[Info] [Freenect2DeviceImpl] submitting depth transfers…
[Error] [DepthPacketStreamParser] Packet buffer is NULL
[Error] [DepthPacketStreamParser] Packet buffer is NULL
查看错误信息我们可以得知问题出在opencl上,找不到opencl设备
解决方案:
a、查看https://github.com/OpenKinect/libfreenect2里关于双显卡的安装依赖包,下载nvidia对应显卡的cuda,两个显卡都安装后,重新编译,再执行其他操作。在xps13的笔记本上只有一个显卡,所以一遍通过。
b、如果不安装opencl,则可以通过opengl+cpu的形式执行,opengl用来计算深度图(depth),cpu用来计算(color)的方式,解决。
修改iai_kinect2/kinect2_bridge/launch下kinect2_bridge.launch
将
<arg name="depth_method" default="default"/>
<arg name="reg_method" default="default"/>
修改为
<arg name="depth_method" default="opengl"/>
<arg name="reg_method" default="cpu"/>
再次执行roslaunch kinect2_bridge kinect2_bridge.launch,报错
[Kinect2Bridge::initRegistration] CPU registration is not available! ".
参考解决方案:https://github.com/code-iai/iai_kinect2/issues/447
这里找不到cpu是因为eigen找不到的原因
locate FindEigen3.cmake
locate找到FindEigen3.cmake复制到iai_kinect2/kinect2_registration/cmake下,重新catkin_make整个iai_kinect2工程可解决问题。
6、安装octomap1.9
源码下载git clone https://github.com/OctoMap/octomap.git
cd octomap
mkdir build&&cd build
cmake …
make
sudo make install
传感器安装部分结束。安装参考博客https://blog.csdn.net/wuguangbin1230/article/details/77184032
二、基于ORBSLAM2的pcl-1.7点云拼接与三维稠密点云重建
先进行个稠密点云的三维重建,感谢高博做出的工作!https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map
在高博基础上,另一位大佬给稠密地图加了回环https://github.com/tiantiandabaojian/ORB-SLAM2_RGBD_DENSE_MAP.git
我的工作是将kineticV2相机的稠密点云实时转换成octomap,并在rviz里进行展示。
原理:用单目、双目、RGBD都可以进行稠密地图的建立,建立全局地图是我们实现导航的第一步,通过相机图像将像素转换为点云(pointcloud)数据,进而进行拼接,在此基础上如果要恢复物体外观轮廓,就需要使用三角网格(mesh)、面片(surfel)进行建图,这样的生成的pcd点云地图往往很大,跑tum生成的数据集都可达到5、600MB的大小,用于导航的话非常不利于我们设备进行导航地图的导入,所以亦可以通过体素(voxel)占据网格地图(Occupancy Map)。
点云包含xyz和rgb信息
外点滤波器以及降采样滤波器。
数据集实现效果:
先抛出代码,后面解释
pointcloudmapping.c文件
/*
* <one line to give the program's name and a brief idea of what it does.>
* Copyright (C) 2016 <copyright holder> <email>
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
*
*/
#include "pointcloudmapping.h"
#include <KeyFrame.h>
#include <opencv2/highgui/highgui.hpp>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/filters/statistical_outlier_removal.h>
#include "Converter.h"
#include "PointCloude.h"
#include "System.h"
int currentloopcount = 0;
/*
*
* @param resolution_ :体素大小分辨率,分辨率越小,单个体素越小
* @param meank_ : meank_ 为在进行统计时考虑查询邻近点个数
* @param thresh_:设置距离阈值,其公式是 mean + global stddev_mult * global stddev,即mean+1.0*stddev
* @return :无
*/
PointCloudMapping::PointCloudMapping(double resolution_,double meank_,double thresh_)
{
this->resolution = resolution_;//分辨率
this->meank = thresh_;
this->thresh = thresh_;
statistical_filter.setMeanK(meank);//统计估计滤波参数
statistical_filter.setStddevMulThresh(thresh);
voxel.setLeafSize( resolution, resolution, resolution);//设置每个体素子叶分辨率
globalMap = boost::make_shared< PointCloud >( );
viewerThread = make_shared<thread>( bind(&PointCloudMapping::viewer, this ) );
}
/*
* void PointCloudMapping::shutdown()
* \brief 关闭建图线程
*/
void PointCloudMapping::shutdown()
{
{
unique_lock<mutex> lck(shutDownMutex);
shutDownFlag = true;
keyFrameUpdated.notify_one();
}
//等待PointCloudMapping_viewer 本线程执行结束再执行系统主线程
viewerThread->join();
}
//插入关键帧
/*
*
* @param kf 关键帧
* @param color 关键帧彩色图
* @param depth 关键帧深度图
* @param idk 第idk个关键帧
* @param vpKFs 获取全部关键帧
* @function 在点云地图里插入关键帧
*/
void PointCloudMapping::insertKeyFrame(KeyFrame* kf, cv::Mat& color, cv::Mat& depth,int idk,vector<KeyFrame*> vpKFs)
{
cout<<"receive a keyframe, id = "<<idk<<" 第"<<kf->mnId<<"个"<<endl;
//cout<<"vpKFs数量"<<vpKFs.size()<<endl;
unique_lock<mutex> lck(keyframeMutex);
keyframes.push_back( kf );
currentvpKFs = vpKFs;
//colorImgs.push_back( color.clone() );
//depthImgs.push_back( depth.clone() );
PointCloude pointcloude;
pointcloude.pcID = idk;
pointcloude.T = ORB_SLAM2::Converter::toSE3Quat( kf->GetPose() );//获取关键帧位姿
pointcloude.pcE = generatePointCloud(kf,color,depth);//迭代关键帧点云
pointcloud.push_back(pointcloude);
keyFrameUpdated.notify_one();//通知线程开锁
}
/**
*
* @param kf 关键帧
* @param color 彩色图
* @param depth 深度图
* @return 关键帧点云
*/
pcl::PointCloud< PointCloudMapping::PointT >::Ptr PointCloudMapping::generatePointCloud(KeyFrame* kf, cv::Mat& color, cv::Mat& depth)//,Eigen::Isometry3d T
{
//新建一个点云// point cloud is null ptr
PointCloud::Ptr tmp( new PointCloud() );
//对点云进行
for ( int m=0; m<depth.rows; m+=2 )
{
for ( int n=0; n<depth.cols; n+=2 )
{
float d = depth.ptr<float>(m)[n];//获取(m,n)处的深度值
if (d < 0.01 || d>5)//滤除设备可靠深度范围之外点
continue;
PointT p;
//相机模型,只计算关键帧的点云
//座标系与pcl座标系相反,所以可以p.z=-d
p.z = d;
p.x = ( n - kf->cx) * p.z / kf->fx;
p.y = ( m - kf->cy) * p.z / kf->fy;
//彩色图计算点云颜色
p.b = color.ptr<uchar>(m)[n*3];
p.g = color.ptr<uchar>(m)[n*3+1];
p.r = color.ptr<uchar>(m)[n*3+2];
tmp->points.push_back(p);
}
}
//cout<<"generate point cloud for kf "<<kf->mnId<<", size="<<cloud->points.size()<<endl;
return tmp;
}
/*
* @brief 显示点云线程
*/
void PointCloudMapping::viewer()
{
//创建显示点云窗口
pcl::visualization::CloudViewer viewer("viewer");
while(1)
{
{
unique_lock<mutex> lck_shutdown( shutDownMutex );
if (shutDownFlag)
{
break;
}
}
{
unique_lock<mutex> lck_keyframeUpdated( keyFrameUpdateMutex );
keyFrameUpdated.wait( lck_keyframeUpdated );
}
// keyframe is updated
size_t N=0;
{
unique_lock<mutex> lck( keyframeMutex );
N = keyframes.size();
}
if(loopbusy || bStop)
{
//cout<<"loopbusy || bStop"<<endl;
continue;
}
//cout<<lastKeyframeSize<<" "<<N<<endl;
if(lastKeyframeSize == N)
cloudbusy = false;
//cout<<"待处理点云个数 = "<<N<<endl;
cloudbusy = true;
for ( size_t i=lastKeyframeSize; i<N ; i++ )
{
PointCloud::Ptr p (new PointCloud);
//将点云数据转换成ascii码形式存储在pcd文件中
//1、源点云 2、转变后的点云 3、位姿变换矩阵
pcl::transformPointCloud( *(pointcloud[i].pcE), *p, pointcloud[i].T.inverse().matrix());
// 转换后的点云叠加存储在globalMap中
*globalMap += *p;
}
// depth filter and statistical removal
//这里的滤波只是显示上的滤波
PointCloud::Ptr tmp1 ( new PointCloud );
statistical_filter.setInputCloud(globalMap); //对globalMap进行统计学去噪
statistical_filter.filter( *tmp1 ); // 执行去噪计算并保存点到 tmp1
//体素滤波器voxel filter进行降采样
PointCloud::Ptr tmp(new PointCloud());
voxel.setInputCloud( tmp1 );
voxel.filter( *globalMap );
//globalMap->swap( *tmp );
viewer.showCloud( globalMap );
cout<<"show global map, size="<<N<<" "<<globalMap->points.size()<<endl;
lastKeyframeSize = N;
cloudbusy = false;
}
}
/*
* 保存pcd地图
*/
void PointCloudMapping::save()
{
pcl::io::savePCDFile( "/home/linker/catkin_make/src/MYNT-EYE-ORB-SLAM2-Sample/result.pcd", *globalMap );
cout<<"globalMap save finished"<<endl;
}
/*
* 更新点云
*/
void PointCloudMapping::updatecloud()
{
if(!cloudbusy)
{
loopbusy = true;
cout<<"startloopmappoint"<<endl;
PointCloud::Ptr tmp1(new PointCloud);
for (int i=0;i<currentvpKFs.size();i++)
{
for (int j=0;j<pointcloud.size();j++)
{
if(pointcloud[j].pcID==currentvpKFs[i]->mnFrameId)
{
Eigen::Isometry3d T = ORB_SLAM2::Converter::toSE3Quat(currentvpKFs[i]->GetPose() );
PointCloud::Ptr cloud(new PointCloud);
pcl::transformPointCloud( *pointcloud[j].pcE, *cloud, T.inverse().matrix());
*tmp1 +=*cloud;
continue;
}
}
}
cout<<"finishloopmap"<<endl;
PointCloud::Ptr tmp2(new PointCloud());
voxel.setInputCloud( tmp1 );
voxel.filter( *tmp2 );
globalMap->swap( *tmp2 );
loopbusy = false;
loopcount++;
}
}
//获取全局点云地图点,智能指针,return 回来
pcl::PointCloud<PointCloudMapping::PointT>::Ptr PointCloudMapping::getGlobalMap() {
return this->globalMap;
}
pointcloudmapping.h
/*
* <one line to give the program's name and a brief idea of what it does.>
* Copyright (C) 2016 <copyright holder> <email>
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
*
*/
#ifndef POINTCLOUDMAPPING_H
#define POINTCLOUDMAPPING_H
#include "System.h"
#include "PointCloude.h"
#include <pcl/common/transforms.h>
#include <pcl/point_types.h>
#include <pcl/filters/voxel_grid.h>
#include <condition_variable>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/statistical_outlier_removal.h>
using namespace std;
using namespace ORB_SLAM2;
class PointCloudMapping
{
public:
//定义点云类型
typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloud;
PointCloudMapping( double resolution_,double meank_,double thresh_ );
void save();
// 插入一个keyframe,会更新一次地图
void insertKeyFrame( KeyFrame* kf, cv::Mat& color, cv::Mat& depth,int idk,vector<KeyFrame*> vpKFs );
void shutdown();
void viewer();
void inserttu( cv::Mat& color, cv::Mat& depth,int idk);
int loopcount = 0;
vector<KeyFrame*> currentvpKFs;
bool cloudbusy;
bool loopbusy;
void updatecloud();
bool bStop = false;
PointCloud::Ptr getGlobalMap();
protected:
PointCloud::Ptr globalMap;
PointCloud::Ptr generatePointCloud(KeyFrame* kf, cv::Mat& color, cv::Mat& depth);
//PointCloud::Ptr globalMap;
shared_ptr<thread> viewerThread;
bool shutDownFlag =false;
mutex shutDownMutex;
condition_variable keyFrameUpdated;
mutex keyFrameUpdateMutex;
vector<PointCloude> pointcloud;
// data to generate point clouds
vector<KeyFrame*> keyframes;
vector<cv::Mat> colorImgs;
vector<cv::Mat> depthImgs;
vector<cv::Mat> colorImgks;
vector<cv::Mat> depthImgks;
vector<int> ids;
mutex keyframeMutex;
uint16_t lastKeyframeSize =0;
double resolution = 0.04;
double meank = 50;
double thresh = 1;
pcl::VoxelGrid<PointT> voxel;
pcl::StatisticalOutlierRemoval<PointT> statistical_filter;
};
#endif // POINTCLOUDMAPPING_H
void System::Shutdown()
{
mpLocalMapper->RequestFinish();
mpLoopCloser->RequestFinish();
mpPointCloudMapping->shutdown();
if(mpViewer)
{
mpViewer->RequestFinish();
while(!mpViewer->isFinished())
usleep(5000);
}
// Wait until all thread have effectively stopped
while(!mpLocalMapper->isFinished() || !mpLoopCloser->isFinished() || mpLoopCloser->isRunningGBA())
{
usleep(5000);
}
if(mpViewer)
pangolin::BindToContext("ORB-SLAM2: Map Viewer");
}
void System::save()
{
mpPointCloudMapping->save();
}
pcl::PointCloud<PointCloudMapping::PointT>::Ptr System::getGlobalMap() {
return mpPointCloudMapping->getGlobalMap();
}
int System::getloopcount()
{
return mpLoopCloser->loopcount;
}
}
track.cc中void Tracking::CreateNewKeyFrame()函数添加
// insert Key Frame into point cloud viewer
vector<KeyFrame*> vpKFs = mpMap->GetAllKeyFrames();
mpPointCloudMapping->insertKeyFrame( pKF, this->mImRGB, this->mImDepth ,idk,vpKFs);
LoopClousing.cc的void LoopClosing::RunGlobalBundleAdjustment(unsigned long nLoopKF)添加代码
//稠密建图
loopcount++;
while(loopcount!=mpPointCloudMapping->loopcount)
mpPointCloudMapping->updatecloud();
cout<<"mpPointCloudMapping->loopcount="<<mpPointCloudMapping->loopcount<<endl;
接下来我将生成的稠密点云通过ros_octomap映射到ros话题中,octomap原理高博在书中已经讲的很详细了。
在ros里进行展示
ros_rgbd.cc
int main(int argc, char **argv)
{
ros::init(argc, argv, "RGBD");
ros::start();
if(argc != 3)
{
cerr << endl << "Usage: rosrun ORB_SLAM2 RGBD path_to_vocabulary path_to_settings" << endl;
ros::shutdown();
return 1;
}
// Create SLAM system. It initializes all system threads and gets ready to process frames.
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::RGBD,true);
ImageGrabber igb(&SLAM);
ros::NodeHandle nh;
//原代码
// message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_raw", 1);
// message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "camera/depth_registered/image_raw", 1);
//修改为kinect2
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/kinect2/qhd/image_color", 1);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/kinect2/qhd/image_depth_rect", 1);
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::Image> sync_pol;
message_filters::Synchronizer<sync_pol> sync(sync_pol(10), rgb_sub,depth_sub);
sync.registerCallback(boost::bind(&ImageGrabber::GrabRGBD,&igb,_1,_2));
//TODO OCTOMAP添加
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr global_map(new pcl::PointCloud<pcl::PointXYZRGBA>);
global_map = SLAM.mpPointCloudMapping->getGlobalMap();
pcl::PointCloud<pcl::PointXYZRGB>::Ptr global_map_copy(new pcl::PointCloud<pcl::PointXYZRGB>);
//数据格式转换
cout<<"-----------------------------------------------------------"<<endl;
cout <<"ros is running "<<endl;
while (ros::ok())
{
pcl::copyPointCloud(*global_map, *global_map_copy);
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2> ("/orbslam2_with_kinect2/output", 10);
sensor_msgs::PointCloud2 output;
pcl::toROSMsg(*global_map_copy,output);// 转换成ROS下的数据类型 最终通过topic发布
output.header.stamp=ros::Time::now();
output.header.frame_id ="camera_rgb_frame";
//output.header.frame_id ="map";
ros::Rate loop_rate(10);
pcl_pub.publish(output);
ros::spinOnce();
loop_rate.sleep();
}
//TODO 结束
//ros::spin();
SLAM.save();
// Stop all threads
SLAM.Shutdown();
// Save camera trajectory
SLAM.SaveKeyFrameTrajectoryTUM("KeyFrameTrajectory.txt");
ros::shutdown();
return 0;
}
之后存在几种方法去实现导航:
1、octomap_server是ROS中的一个基于octomap的功能包。我在查阅资料的时候,发现所有的介绍、博客等资料都是在介绍其将点云地图转化为基于Octree的OctoMap的功能。由于之前一直在查找三维点云地图转化为二维地图的方法,所以之前试过这个包的三维转换功能后就没有在继续使用,由于之前使用其他方法将二维占据栅格地图生成了,然后准备回过头来再看一下octomap_server的三维概率地图,然后在不经意间就发现了它也有转化为二维地图的功能
首先简单介绍下octomap_server【设置】的安装。
打开一个终端.(ctrl+alt+T)输入下面指令安装octomap.
sudo apt-get install ros-kinetic-octomap-ros #安装octomap
sudo apt-get install ros-kinetic-octomap-msgs
sudo apt-get install ros-kinetic-octomap-server
安装octomap 在 rviz 中的插件
sudo apt-get install ros-kinetic-octomap-rviz-plugins
安装上这个插件以后你可以启动 rviz ,这时候点开Add选项,会多一个octomap_rviz_plugins模组.如下图所示:
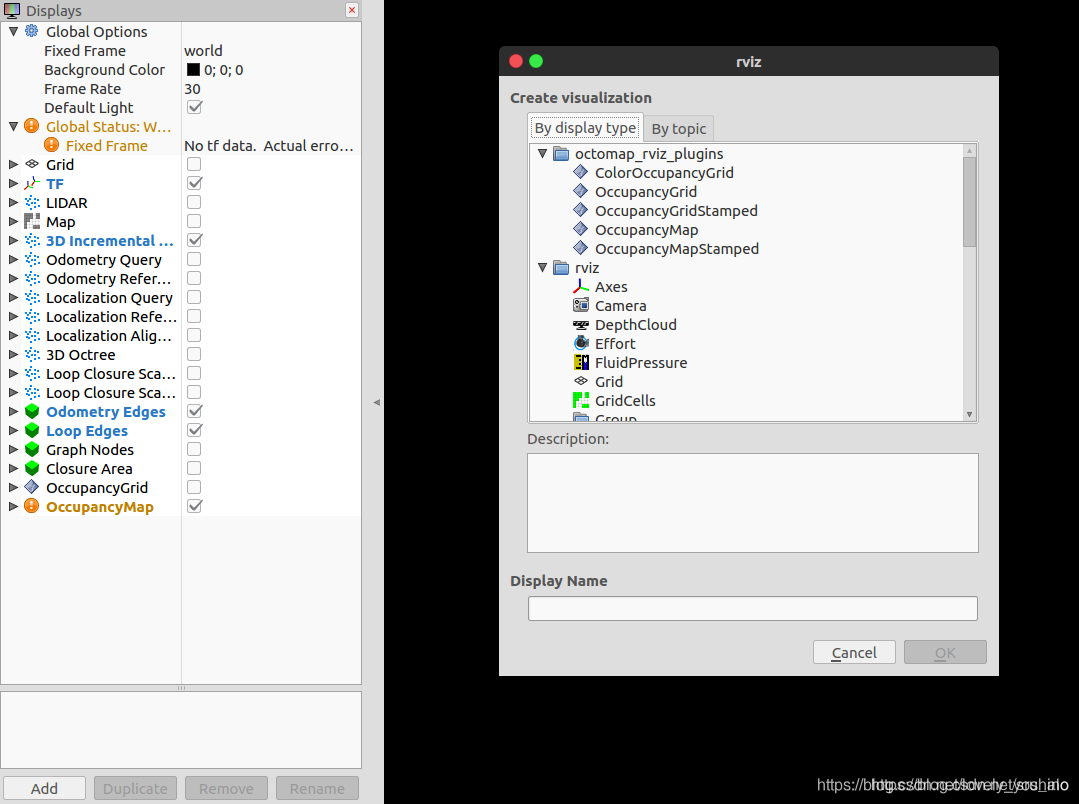
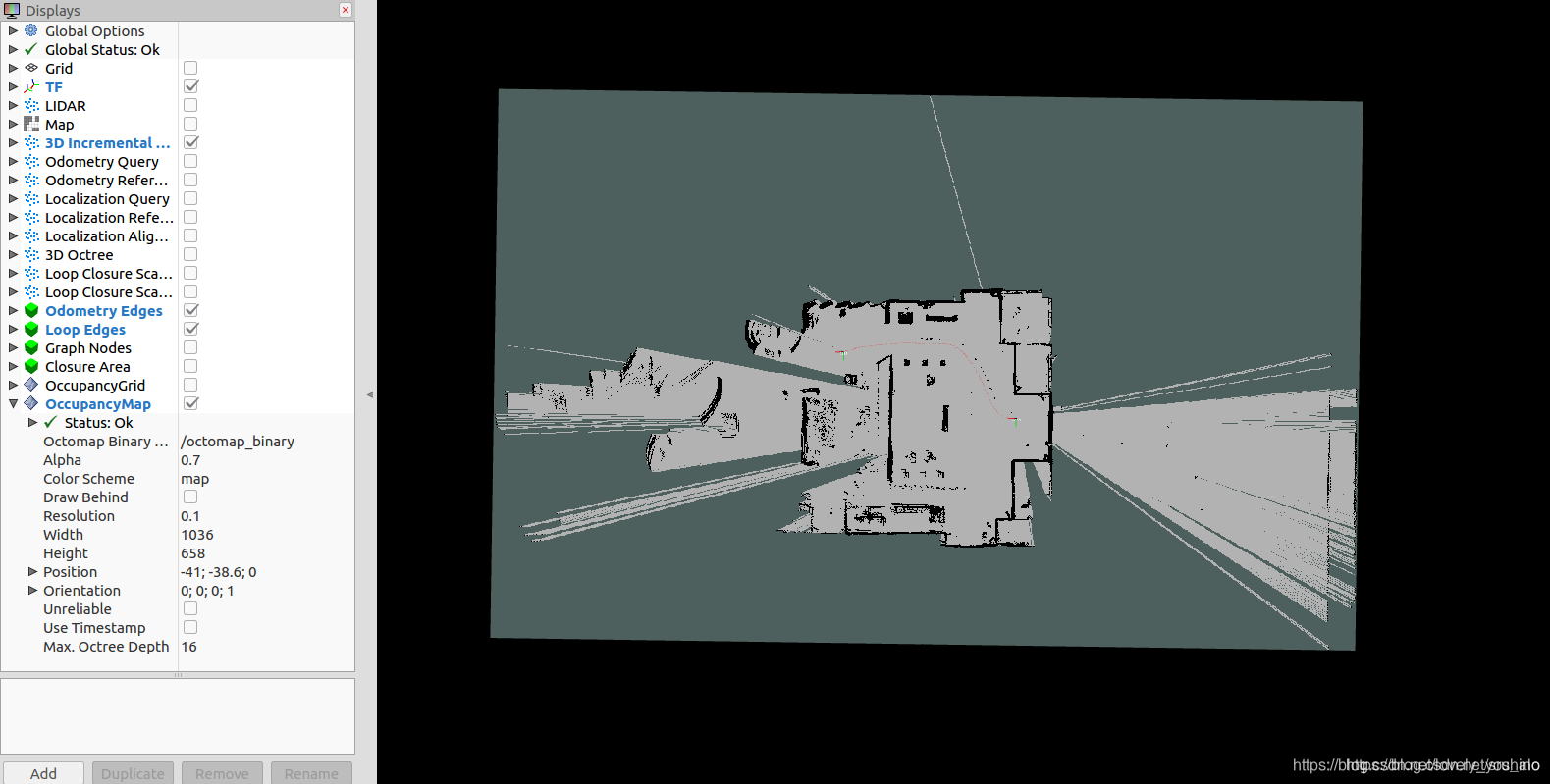
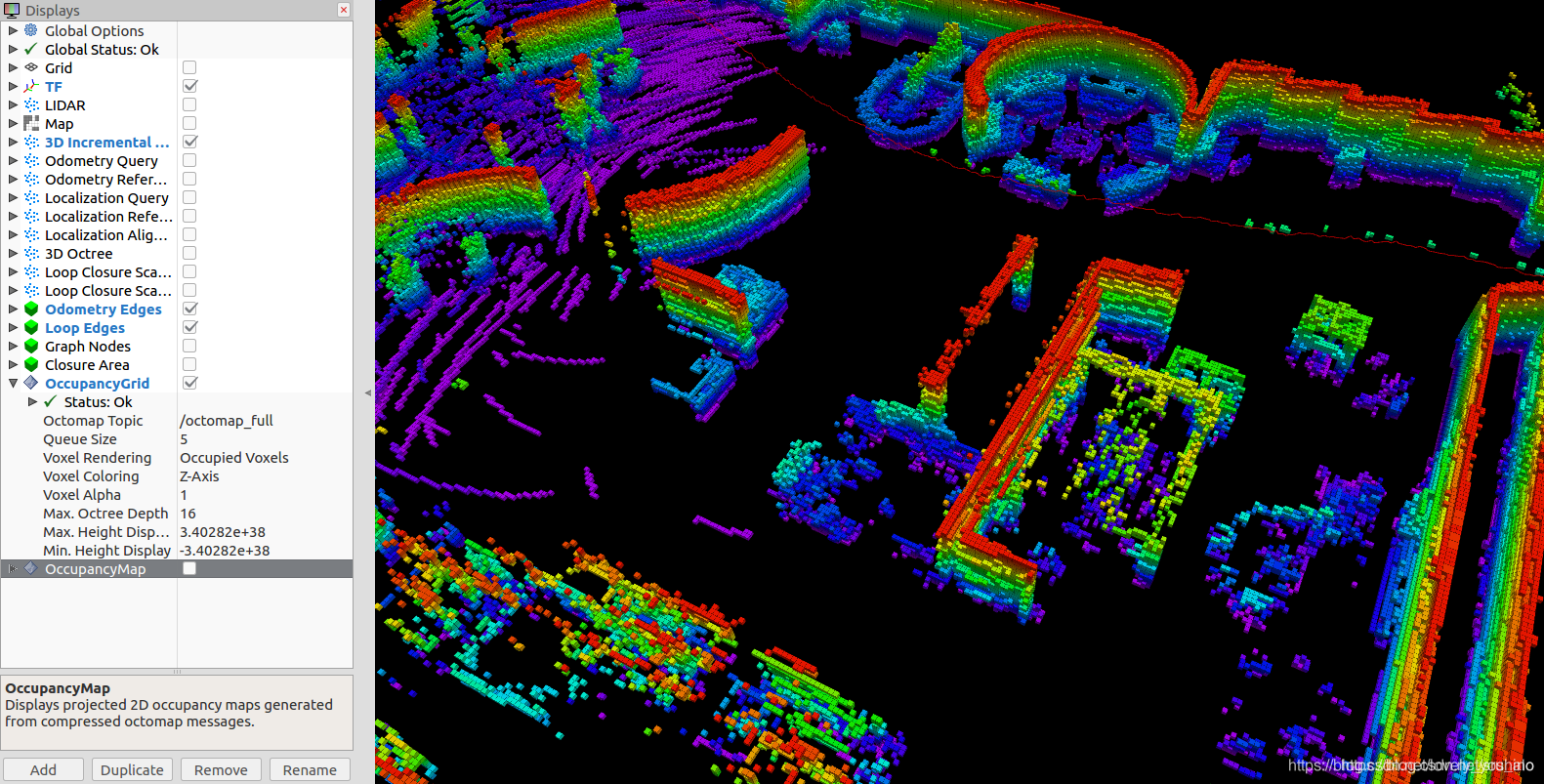
其中的OccupancyGrid是显示三维概率地图,也就是octomap地图。OccupancyMap是显示二维占据栅格地图。
可以通过一个launch文件启动octomap_server节点,如下:
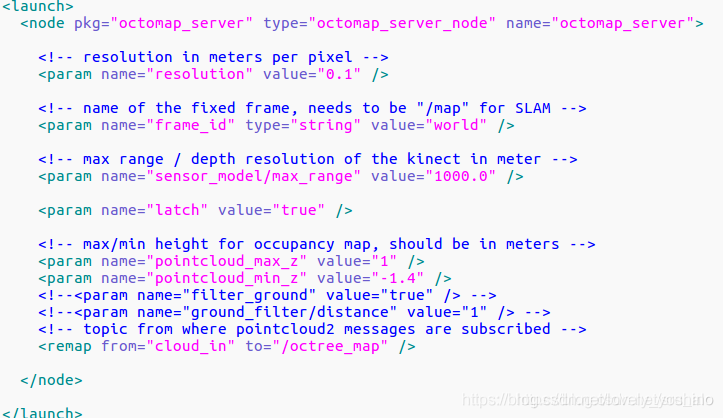
其中的param都是可以修改的,具体的修改细节见这里。/octotree_map修改为自己的PointCloud2点云即可。
运行此launch文件会有如下话题:
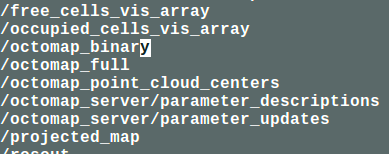
打开rviz,在里面添加OccupancyGrid,OccupancyMap,Map显示选项,显示话题选择octomap_full或者octomap_binary。
注意:param中的frame_id要和rviz的Fixed Frame一致。
Map:
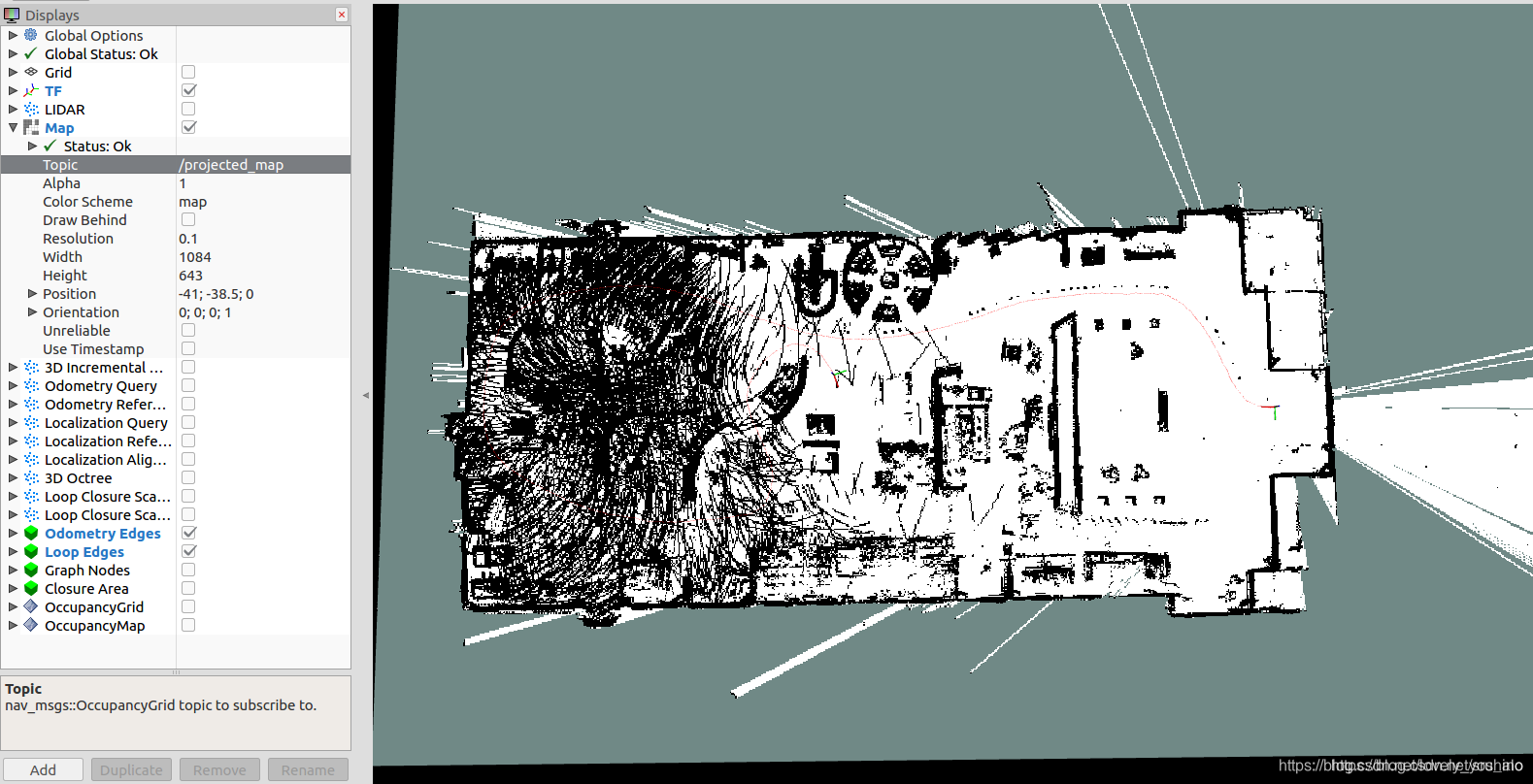
OccupancyMap:
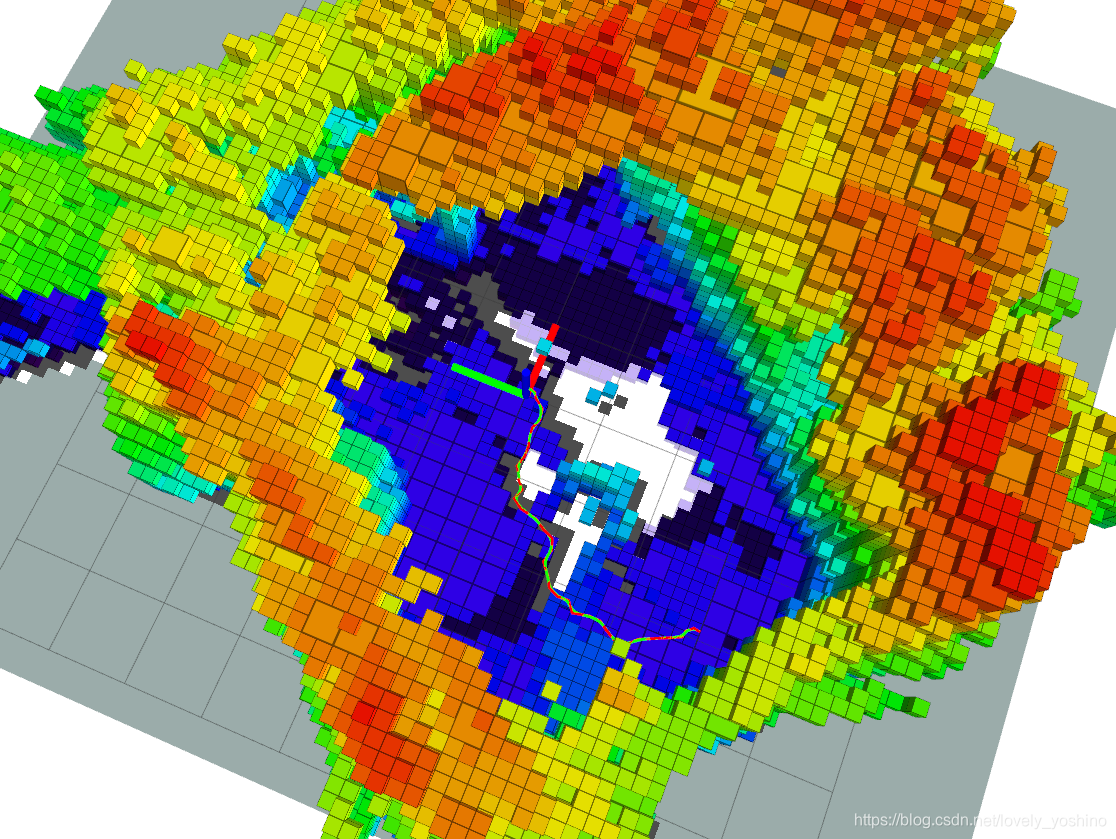
OccupancyGrid:
对应的参考代码:https://github.com/306327680/PointCloud-to-grid-map【参考注释】
或者北达科他大学( North Dakota State University)cloud_to_map学习代码:https://download.csdn.net/download/sru_alo/12277545
2、使用3D稠密点云图,并使用octomap进行压缩滤除地面信息。然后通过2D投影生成占据格地图最后利用costmap进行全局和局部路径规划导航实时避障。【参考代码】
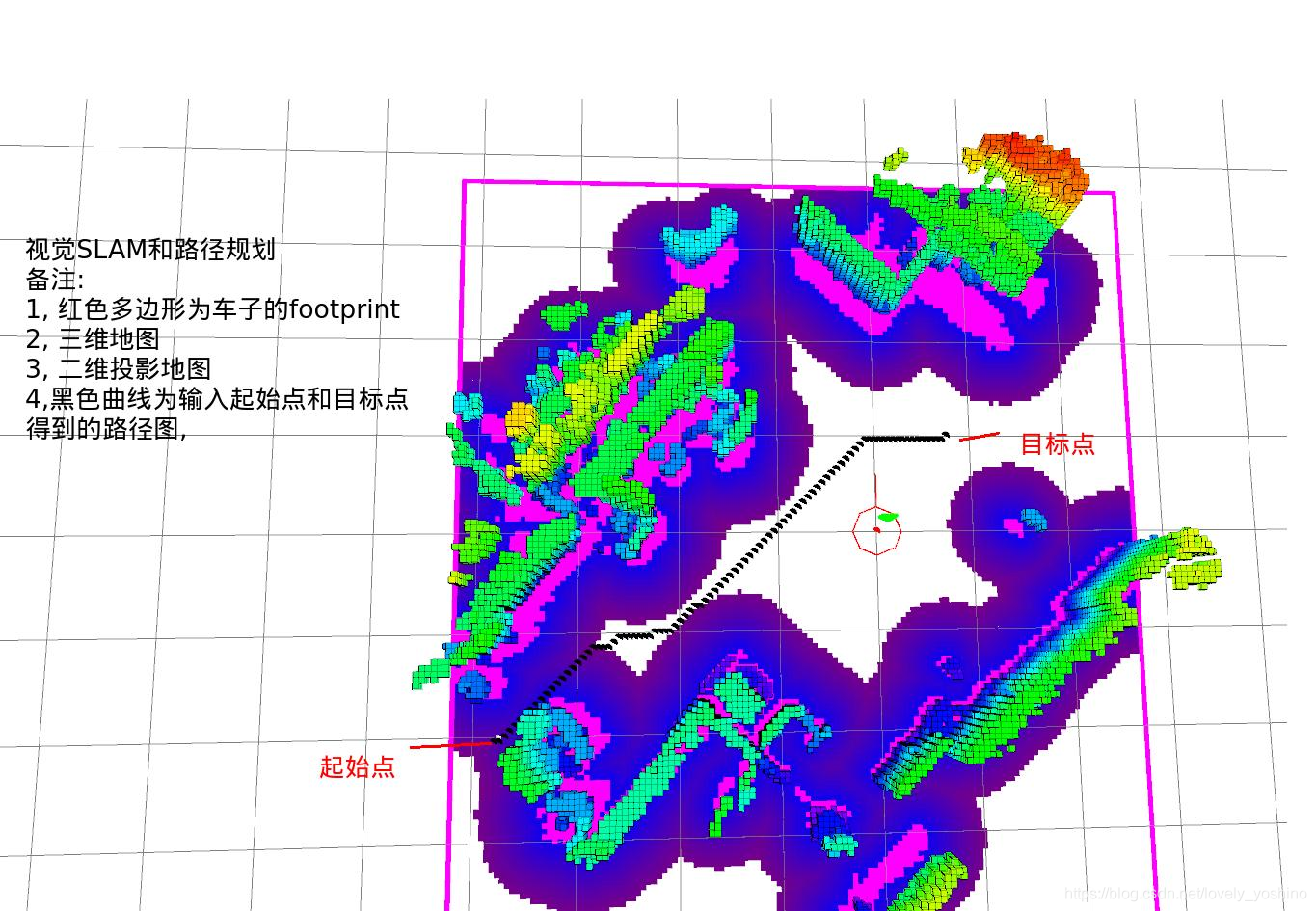
然后参考OctoMap中3D-RRT路径规划

- 点赞
- 收藏
- 关注作者
评论(0)