卡尔曼滤波器2——数据融合(笔记篇 + 代码实现)

前言
本文是观看DR_CAN老师的视频后,简单总结了一下的笔记,并根据思路写了示例代码;这里主要讲使用卡尔曼滤波器进行数据融合。
视频地址:https://www.bilibili.com/video/BV12D4y1S7fU
数据融合 Date Fusion
这里从一个例子开始,用“两个称”来称同一个物体,得到两个结果;第一个称结果是30g,第二个称结构是32g。
由于两个称都不准,存在误差的。第一个称的标准差是2g;第二个称的标准差是4g。而且都符合正态分布,也称为高斯分布。
数学形式记为:
第一个称 
第二个称
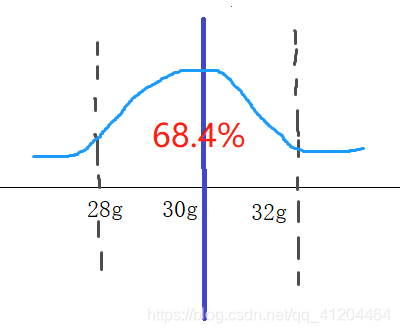
下面看看,两个称的输出的概率分布情况;第一个称服从正态分布,标准差是2g;所以他在28g到32g之间的概率是68.4%。
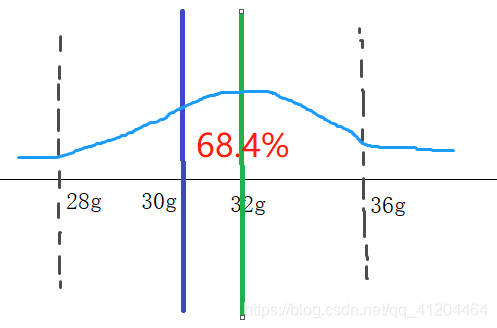
第二个称也服从正态分布,标准差是4g;所以他在28g到36g之间的概率是68.4%。相对于第一个称,由于标准差更大,所以看起来,更矮一些更胖一些。
现在需要用这两个称的结果,去“估计真实值”,如何估算呢?
感觉上是在这两个称结果之间,而且第一个称标准差更小,真实结果更靠近第一个称的结果。
数学上是找到一个最优值,于是采用卡尔曼算法。设估计值为,则:
其中 K 是卡尔曼增益;它的范围在0到1,即[0,1]。
目的 是求 K 使得估计值的标准最少,也就是使得估计值的方差最小。
设: 估计值 ,估计值标准差,估计值的方差Var()。
估计值的方差 =
备注:红色和蓝色两部分相互独立,可以单独拿出来;
如果要求估计值方差的最小值,需要对k求导,然后令它等于0,就可以求得极值了:
上面求得 估计值的方差,进行求导得到:
即:
整理后得到:
好啦,现在求出k,这个k值能使得估计值方差的最小
然后把数据代入,
第一个称
第二个称
先求k值 卡尔曼增益,
然后计算估计值 ,
最后更新一下估计值的方差,
于是估计值的标准差 等于1.79。
Python版的伪代码:
'''
卡尔曼滤波——数据融合
'''
# 卡尔曼增益 = 数据1的误差 除以 (数据1的误差 + 数据2的误差)
# 误差对应方差!!
def kalman_gain(e1, e2):
return e1/(e1 + e2)
# 估计值 = 数据1的估计值 + 系数*(数据2测量值 - 数据1的估计值)
def now_estimated_value(X1, K, X2):
return X1 + K(X2 - X1)
# 更新估计误差 = (1 - 卡尔曼增益)* 数据1的估计误差 + 卡尔曼增益* 数据2的估计误差
def now_estimated_error(K, e1, e2):
return (1 - K)*e1 + k*e2
# 循环体
K = kalman_gain(e1, e2)
X_k = now_estimated_value(X1, K, X2)
e_EST = now_estimated_error(K, e1, e2)
- 点赞
- 收藏
- 关注作者
评论(0)