基于 YOLOv8 的多车型交通车辆实时检测识别项目 [目标检测完整源码]

基于 YOLOv8 的多车型交通车辆实时检测识别项目 [目标检测完整源码]
一、背景与问题引入
在智慧交通体系中,“看得清、分得准、跑得快”始终是视觉感知系统的核心诉求。传统基于规则或特征工程的方法,在复杂道路环境、密集车流、多车型混行的场景下,往往存在鲁棒性不足、维护成本高的问题。
随着深度学习目标检测模型的成熟,YOLO 系列逐渐成为交通视觉领域的主流方案。其中,YOLOv8 以其 Anchor-Free 架构、更优的速度–精度平衡以及完善的工程生态,非常适合用于实时车辆检测与系统级落地。
本文将从工程实践角度,完整介绍一个 支持 12 类常见交通车辆、具备图形化界面、可直接部署运行 的实时检测系统设计与实现思路。

源码下载与效果演示
哔哩哔哩视频下方观看:
https://www.bilibili.com/video/BV1dwg5zCEkL/
包含:
📦完整项目源码
📦 预训练模型权重
🗂️ 数据集地址(含标注脚本
二、系统整体架构设计
该系统并非仅停留在“模型推理”层面,而是以完整应用系统为目标进行设计,整体架构可划分为四个核心模块:
┌────────────┐
│ 数据输入层 │ ← 图片 / 视频 / 摄像头 / 文件夹
└─────┬──────┘
│
┌─────▼──────┐
│ 检测引擎层 │ ← YOLOv8 Detection Model
└─────┬──────┘
│
┌─────▼──────┐
│ 结果处理层 │ ← NMS / 置信度过滤 / 可视化
└─────┬──────┘
│
┌─────▼──────┐
│ UI 交互层 │ ← PyQt5 图形界面
└────────────┘
这种分层结构具备以下优势:
- 算法与界面解耦,便于模型升级
- 输入方式可扩展(无人机、RTSP流等)
- 易于二次开发与功能叠加


三、核心功能能力解析
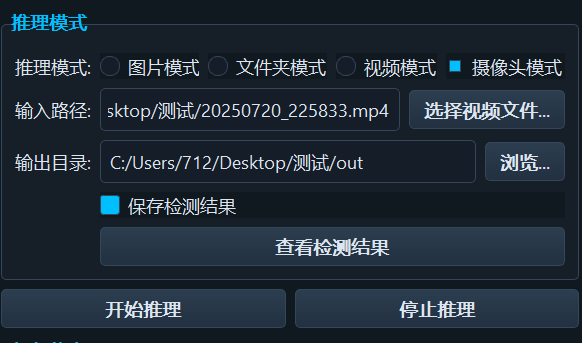
3.1 多源输入的统一检测流程
系统支持多种数据源接入,并统一走同一套检测逻辑:
- 单张图片检测:适合离线分析与测试
- 文件夹批量检测:用于数据清洗与标注校验
- 视频文件检测:适配道路监控录像
- 实时摄像头检测:满足在线监控需求
在底层实现上,通过对输入源进行抽象封装,确保模型推理逻辑保持一致,避免重复代码。
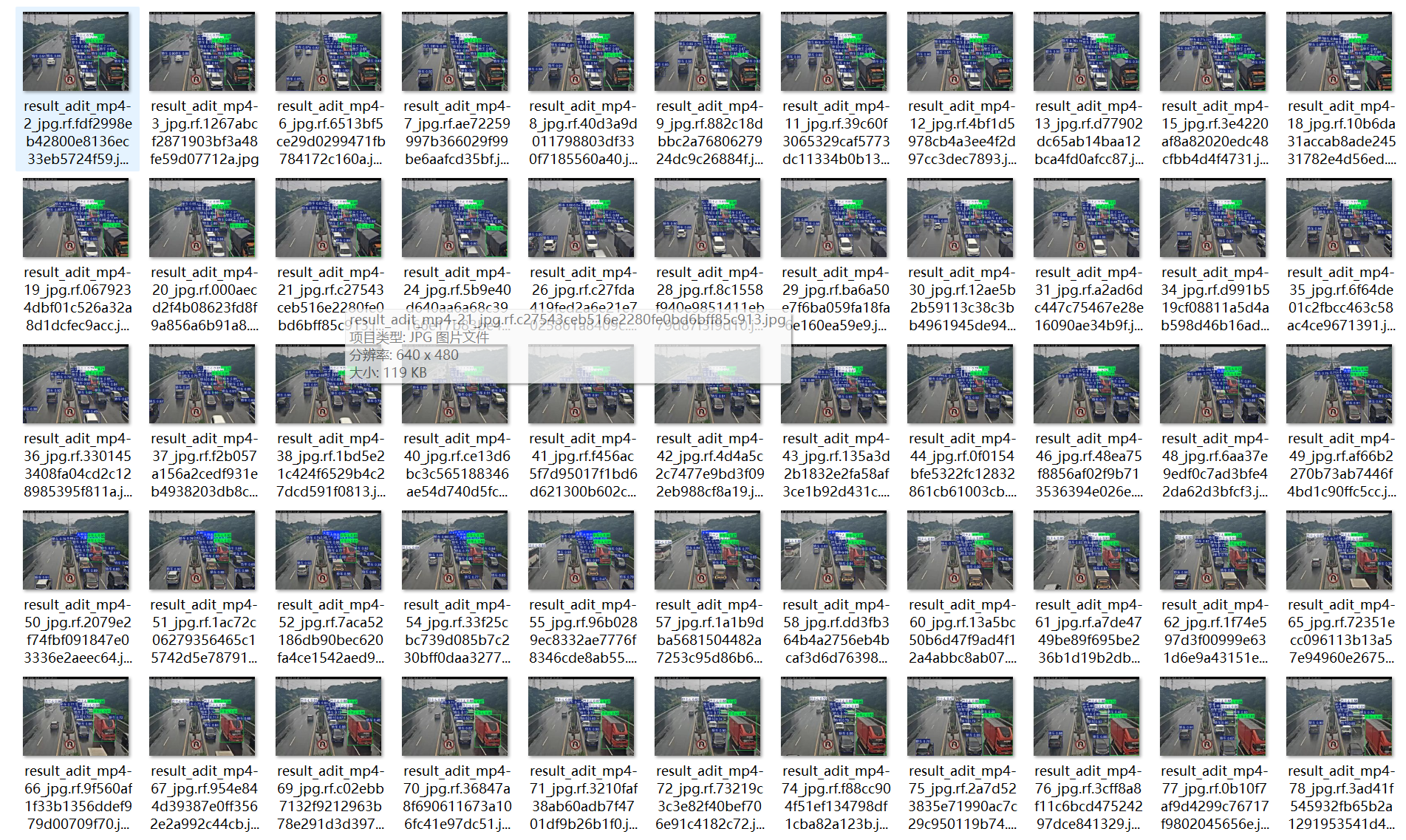
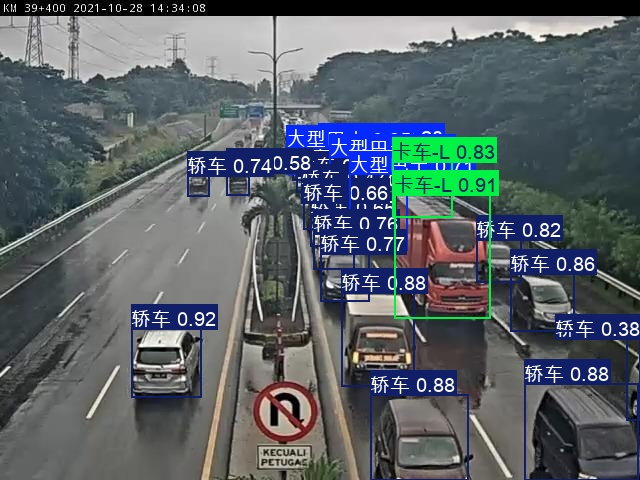
3.2 多车型精细化识别
本项目针对真实交通场景,定义了 12 类常见车辆类型,涵盖:
- 轿车、SUV、面包车
- 公交车、卡车、工程车辆
- 特殊用途车辆等
YOLOv8 的 Anchor-Free 机制在多尺度目标(远距离小车 / 近景大车)检测中表现稳定,有效降低漏检与误检率。
3.3 PyQt5 图形化交互系统
为了降低系统使用门槛,引入 PyQt5 构建桌面级应用界面,核心设计原则是:
- 无需编程经验即可使用
- 操作路径清晰
- 结果可视、可保存
主要功能包括:
- 输入源选择与切换
- 检测启动 / 停止控制
- 实时画面显示(带检测框)
- 检测结果自动保存
这使得模型能力真正转化为“可使用的软件”,而不仅是脚本级 Demo。
四、YOLOv8 模型训练与评估实践
4.1 数据集组织规范
项目采用标准 YOLO 数据格式,便于复用与迁移:
dataset/
├── images/
│ ├── train
│ └── val
└── labels/
├── train
└── val
标签文件采用归一化坐标,兼容 Ultralytics 官方训练接口。
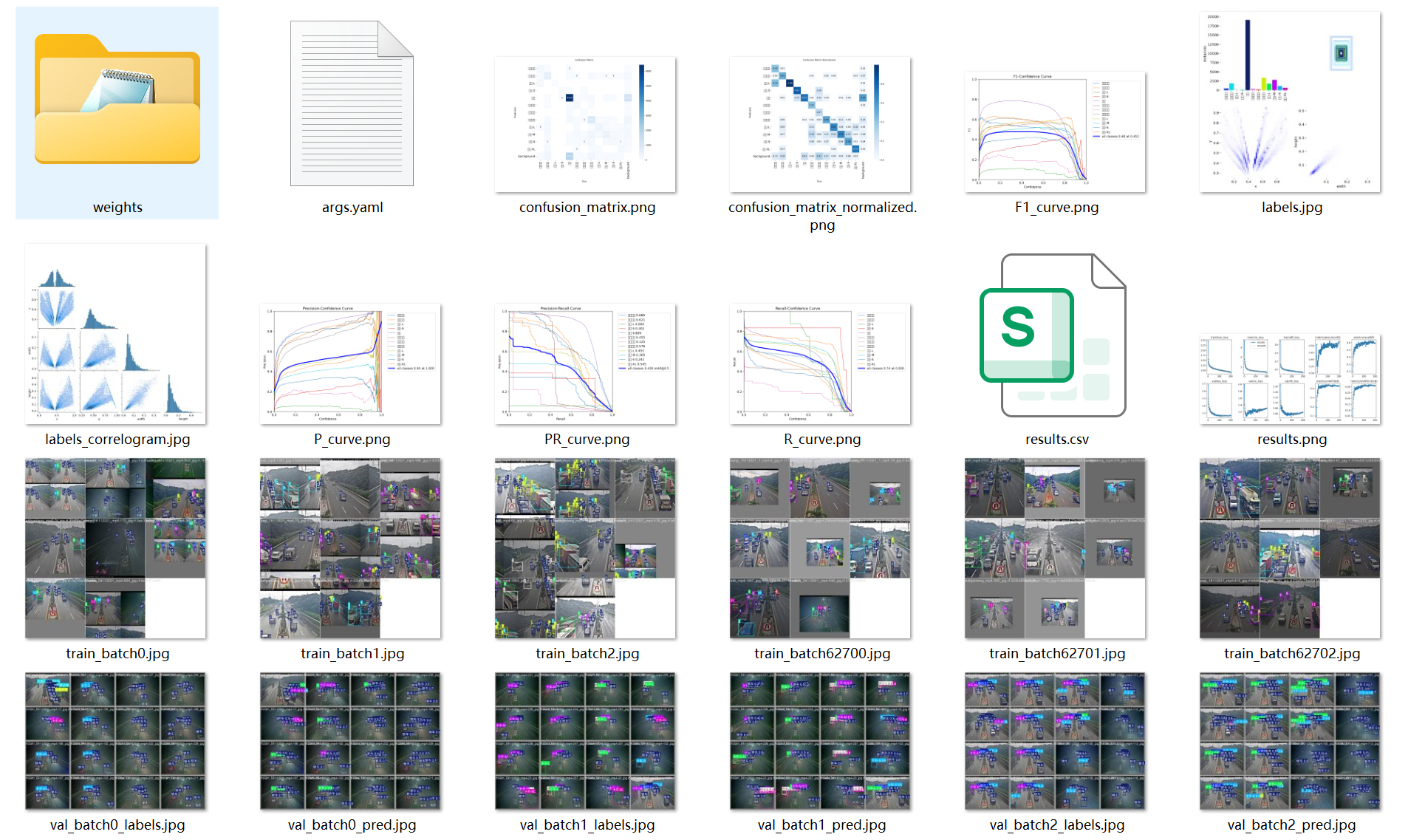
4.2 模型训练策略
训练阶段基于 YOLOv8 预训练权重进行微调,核心关注点包括:
- box_loss:定位精度
- cls_loss:车辆类别区分能力
- dfl_loss:边框质量优化
在实际项目中,当 mAP@0.5 稳定超过 90%,即可满足工程部署需求。
4.3 推理与部署方式
模型推理通过 Ultralytics 官方 API 完成,具备如下特点:
- 接口简洁,代码量少
- 支持 CPU / GPU 自适应
- 可导出 ONNX / TensorRT
结合 UI 层,可直接形成“即点即检”的完整工作流。
五、工程化落地与可扩展性
与单纯算法实验不同,该项目在工程层面具备以下实用特性:
- 完整源码与权重打包
- 一行命令启动系统
- 训练 / 推理 / UI 全流程覆盖
在此基础上,可进一步拓展:
- 车辆轨迹跟踪(DeepSORT / ByteTrack)
- 车流量统计与时间序列分析
- 多路摄像头并行检测
- 智慧交通平台对接

六、总结与展望
本文从系统视角出发,完整介绍了一套 基于 YOLOv8 的多车型交通车辆实时检测平台 的设计与实现思路。通过将高性能目标检测模型与 PyQt5 图形界面深度融合,实现了从算法能力到实际可用系统的有效转化。
该项目不仅适用于智慧交通与城市监控场景,也非常适合作为:
- 计算机视觉工程实战案例
- AI 教学与科研实验平台
- 工业级视觉系统原型
随着模型与算力的持续演进,交通视觉系统将不再只是“看见车辆”,而是逐步走向 理解交通、预测交通、优化交通。这一项目,正是迈向该目标的一个扎实起点。
本文从工程化与系统化的角度,介绍了一套基于 YOLOv8 的多车型交通车辆实时检测系统,完整覆盖了数据输入、模型训练、推理部署以及 PyQt5 图形化交互等关键环节。通过将高精度目标检测模型与易用的桌面端界面相结合,系统实现了对多种交通场景下车辆目标的稳定识别与实时展示,显著降低了深度学习技术在智慧交通领域的使用门槛。整体方案结构清晰、可扩展性强,不仅具备直接落地应用的工程价值,也为后续在车流统计、行为分析和交通智能决策等方向上的功能扩展提供了良好的技术基础。

- 点赞
- 收藏
- 关注作者
评论(0)