基于 YOLOv8 的共享单车乱停放智能识别系统— 从数据集构建到可视化部署的完整项目

基于 YOLOv8 的共享单车乱停放智能识别系统— 从数据集构建到可视化部署的完整项目
一、项目背景:为什么要做“乱停放识别”?
随着共享单车在城市中的高密度投放,“最后一公里”出行问题得到了极大缓解,但随之而来的随意停放、占道堆积、盲道阻塞等问题,也成为城市治理中的一大痛点。
在实际城市管理中,传统处理方式主要依赖以下手段:
- 人工巡查(成本高、效率低)
- 群众举报(滞后、不可控)
- 简单规则检测(误报率高)
这些方式很难应对大规模、全天候、动态变化的街景环境。因此,基于计算机视觉的自动化识别方案成为一种必然选择。
本项目的目标是:
🎯 构建一套完整、可落地的共享单车/自行车乱停放智能识别系统
覆盖:数据 → 训练 → 推理 → UI → 部署
源码下载与效果演示
哔哩哔哩视频下方观看:
包含:
📦完整项目源码
📦 预训练模型权重
🗂️ 数据集地址(含标注脚本
二、系统总体设计思路
从工程角度出发,本项目并非“单一模型测试”,而是完整的软件系统,整体架构如下:
数据采集 → 数据标注 → YOLOv8模型训练
↓
模型评估与调优
↓
PyQt5 可视化检测系统
↓
图片 / 视频 / 摄像头 / 批量检测

系统核心组成模块
| 模块 | 说明 |
|---|---|
| 目标检测模型 | YOLOv8 Detection |
| 深度学习框架 | PyTorch |
| 图形界面 | PyQt5 |
| 推理方式 | 图片 / 文件夹 / 视频 / 摄像头 |
| 输出形式 | 标注图像 / 视频文件 |
| 使用方式 | 开箱即用 / 可二次开发 |
三、YOLOv8 模型选型与原理分析
3.1 为什么选择 YOLOv8?
在众多目标检测模型中(Faster R-CNN、SSD、YOLOv5/7 等),YOLOv8 具备以下明显优势:
- Anchor-Free 架构:减少人为超参依赖
- 更高的推理速度:适合实时摄像头场景
- Ultralytics 官方生态完善:训练、推理、导出一步到位
- 对小目标更友好:适合街景中密集单车检测
3.2 YOLOv8 Detection 架构概览
YOLOv8 仍然遵循经典的三段式结构:
- Backbone:特征提取(C2f + CSP 思想)
- Neck:多尺度特征融合(FPN + PAN)
- Head:Anchor-Free 检测头
其核心改进点在于:
- Task-Aligned Assigner
- 解耦式检测头
- DFL(Distribution Focal Loss)
这些设计显著提升了模型在复杂场景下的稳定性。
四、数据集构建与标注规范
4.1 数据来源与采集
数据主要来自:
- 城市街景实拍
- 公共道路监控截图
- 不同天气 / 光照 / 角度场景
重点覆盖以下情况:
- 随意堆叠停放
- 占用盲道、人行道
- 路口密集区域
- 单车与背景高度相似场景
4.2 YOLO 数据集结构
采用标准 YOLOv8 数据集格式:
dataset/
├── images/
│ ├── train/
│ └── val/
├── labels/
│ ├── train/
│ └── val/
4.3 标注格式说明
每一行标签格式如下:
<class_id> <x_center> <y_center> <width> <height>
坐标全部采用 归一化比例值,便于模型泛化。
五、模型训练流程与参数配置
5.1 训练命令示例
yolo detect train \
data=dataset/bike.yaml \
model=yolov8n.pt \
epochs=100 \
batch=16 \
imgsz=640 \
lr0=0.001
5.2 训练过程关注指标
- box_loss(定位误差)
- cls_loss(分类误差)
- dfl_loss(边界框分布)
- mAP@0.5 / mAP@0.5:0.95
在实验中,当 mAP@0.5 稳定在 90% 以上,模型已具备实际部署价值。
六、模型推理与检测结果分析
6.1 Python 推理示例
from ultralytics import YOLO
model = YOLO("best.pt")
results = model("test.jpg", conf=0.25, save=True)
6.2 输出结果内容
- 检测框位置
- 类别名称
- 置信度评分
- 自动保存标注图像
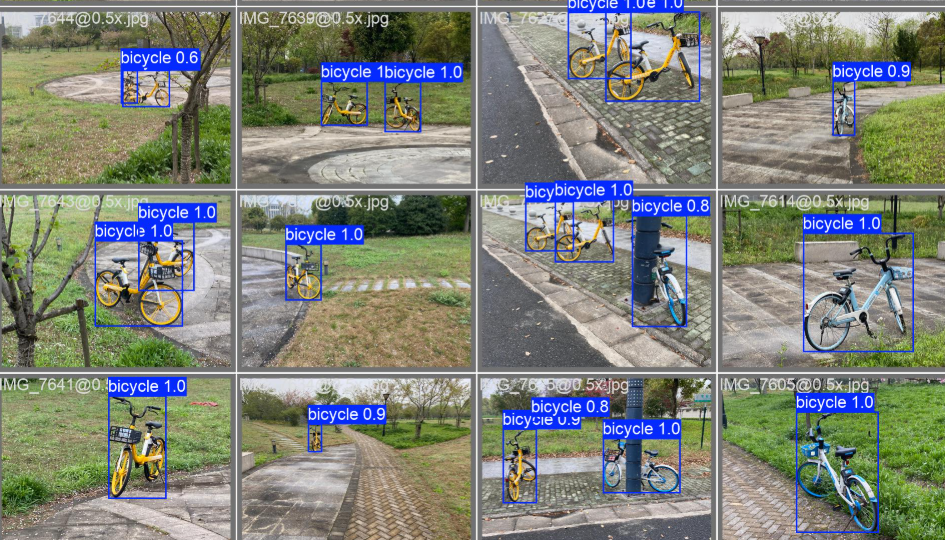
模型在复杂街景、遮挡场景下仍能保持较好鲁棒性。

七、PyQt5 可视化检测系统设计
7.1 为什么要做 GUI?
对于实际使用者(城管、运营人员、学生演示)来说:
❌ 命令行 ≠ 易用
✅ 可视化界面 = 真正可用系统
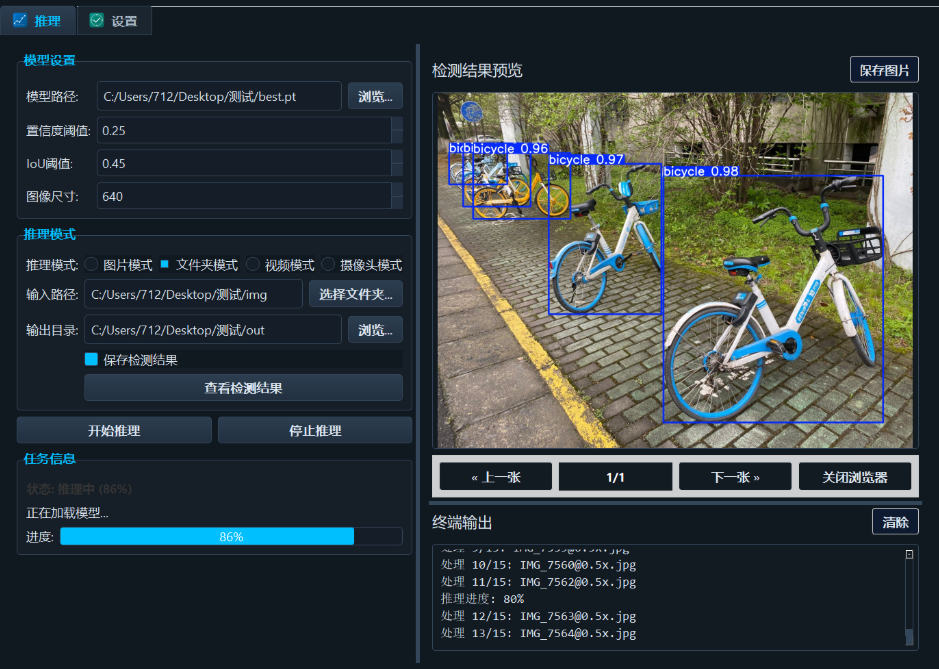
7.2 支持功能一览
- 📷 单张图片检测
- 📁 文件夹批量检测
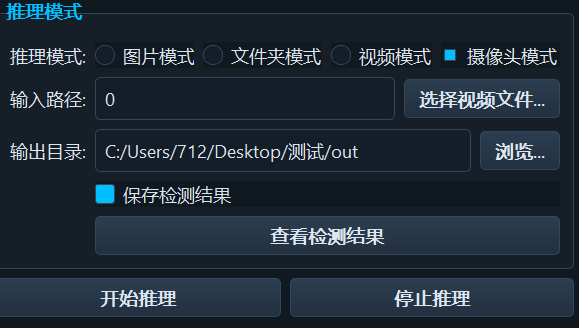
- 🎞️ 视频文件检测
- 🎥 实时摄像头检测
- 💾 结果保存开关
7.3 系统运行方式
python main.py
无需任何深度学习基础,即可完成检测。
八、工程落地与应用场景
本系统可直接应用于:
- 🚦 城市智慧城管
- 🏙️ 智慧园区管理
- 🚴♂️ 共享单车运维监管
- 🎓 计算机视觉教学/毕设
同时,该项目也可作为 YOLOv8 + GUI 工程模板,快速迁移到其他检测任务。
九、完整源码与资源说明
项目已打包提供:
- ✔️ 完整训练代码
- ✔️ 数据集与标注
- ✔️ 训练权重文件
- ✔️ PyQt5 可视化系统
- ✔️ 一键运行脚本
适合:
毕业设计 / 科研实验 / 技术复现 / 二次开发
十、总结
本项目不仅是一次 YOLOv8 模型实践,更是一套从算法到系统、从实验到落地的完整工程方案。
如果你希望:
- 系统性掌握目标检测工程
- 做一个“真正能跑”的 AI 项目
- 拥有可展示、可部署、可扩展的成果
那么,这个项目会是一个非常理想的起点。
本文围绕共享单车/自行车乱停放这一典型的城市治理痛点,完整介绍了一套基于 YOLOv8 目标检测模型 + PyQt5 可视化界面 的智能识别系统。从问题背景出发,系统性地阐述了模型选型理由、数据集构建方式、训练与评估流程,以及多输入源(图片、视频、摄像头、批量文件)的工程化落地实现。该项目不仅在算法层面验证了 YOLOv8 在复杂街景下的高精度与实时性优势,更通过图形化界面降低了使用门槛,使模型真正具备可部署、可使用、可扩展的工程价值。整体方案兼顾技术深度与实用性,既可直接应用于智慧城管与共享单车监管场景,也可作为目标检测教学、毕业设计和二次开发的完整实践范例。

- 点赞
- 收藏
- 关注作者
评论(0)