LLM驱动的跨模态感知-决策一体化智能体环境理解方法

【摘要】 多模态融合为智能体提供了一种更接近真实世界的环境感知方式,使 Agent 能够从视觉、语言和结构化状态等多源信息中构建统一、抽象且鲁棒的环境表示。通过合理的特征编码与融合策略,智能体不仅能提升对复杂环境的理解深度,还能显著增强决策的稳定性与泛化能力。从工程实践来看,多模态感知模块已逐渐成为高性能 Agent 系统的基础组件。随着算力、模型结构和自监督学习方法的不断进步,未来的智能体将具备更强的跨模
一、背景:为什么 Agent 的“环境感知”成为瓶颈?
在当前的 AI Agent(智能体)系统 中,无论是自动驾驶、具身智能、强化学习 Agent,还是 LLM 驱动的 Tool-using Agent,都绕不开一个核心问题:
Agent 对环境的理解能力,直接决定了其决策上限。
现实环境往往是多模态的:
- 视觉:图像、视频、空间结构
- 听觉:语音、环境音
- 语言:文本指令、对话上下文
- 状态:数值传感器、系统指标、位置坐标
如果 Agent 仅依赖单一模态(如只看文本状态或低维数值),往往会出现:
- 环境理解不完整
- 状态抽象能力不足
- 决策对噪声高度敏感
因此,多模态环境感知 + 特征融合,已经成为 Agent 能力提升的关键技术路径。
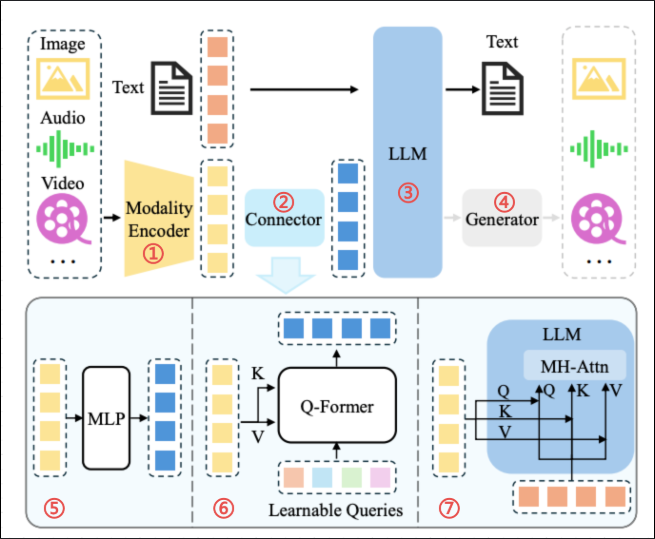
二、多模态环境感知的整体架构
一个典型的多模态环境感知与特征提取流程如下:
┌────────┐ ┌────────┐ ┌────────┐
│ 图像 │ │ 文本 │ │ 数值 │
└───┬────┘ └───┬────┘ └───┬────┘
│ │ │
┌───▼────┐ ┌────▼────┐ ┌────▼────┐
│视觉编码│ │文本编码 │ │状态编码 │
└───┬────┘ └────┬────┘ └────┬────┘
└──────┬──────────────┘
▼
多模态特征融合模块
▼
环境表示(State Embedding)
▼
Agent 决策 / 策略网络
核心思想:
将不同模态的信息映射到统一的特征空间,再进行融合,形成对环境的高层抽象。
三、关键技术一:多模态特征编码
1. 视觉模态:图像环境特征提取
视觉信息通常通过 CNN 或 Vision Transformer 提取。
import torch
import torch.nn as nn
from torchvision import models
class VisualEncoder(nn.Module):
def __init__(self, output_dim=256):
super().__init__()
backbone = models.resnet18(pretrained=True)
self.feature_extractor = nn.Sequential(*list(backbone.children())[:-1])
self.fc = nn.Linear(512, output_dim)
def forward(self, image):
x = self.feature_extractor(image)
x = x.view(x.size(0), -1)
return self.fc(x)
设计要点:
- 去掉分类头,仅保留语义特征
- 输出固定维度 embedding,便于后续融合
2. 文本模态:环境描述与指令理解
文本信息通常来自:
- 人类指令
- 环境描述
- 历史对话
from transformers import AutoModel, AutoTokenizer
class TextEncoder(nn.Module):
def __init__(self, model_name="bert-base-uncased", output_dim=256):
super().__init__()
self.tokenizer = AutoTokenizer.from_pretrained(model_name)
self.encoder = AutoModel.from_pretrained(model_name)
self.fc = nn.Linear(self.encoder.config.hidden_size, output_dim)
def forward(self, texts):
inputs = self.tokenizer(
texts,
padding=True,
truncation=True,
return_tensors="pt"
)
outputs = self.encoder(**inputs)
pooled = outputs.last_hidden_state[:, 0]
return self.fc(pooled)
3. 数值模态:环境状态与传感器信息
数值状态(位置、速度、能耗等)往往被忽视,但对 Agent 决策极其重要。
class StateEncoder(nn.Module):
def __init__(self, input_dim, output_dim=128):
super().__init__()
self.net = nn.Sequential(
nn.Linear(input_dim, 256),
nn.ReLU(),
nn.Linear(256, output_dim)
)
def forward(self, state):
return self.net(state)
四、关键技术二:多模态特征融合策略
1. 简单拼接(Baseline)
def concat_fusion(features):
return torch.cat(features, dim=-1)
优点:简单、高效
缺点:无法建模模态间关系
2. 加权融合(Learnable Fusion)
class WeightedFusion(nn.Module):
def __init__(self, dims):
super().__init__()
self.weights = nn.Parameter(torch.ones(len(dims)))
def forward(self, features):
w = torch.softmax(self.weights, dim=0)
fused = sum(w[i] * features[i] for i in range(len(features)))
return fused
适合场景:
- 不同模态重要性随任务变化
- 轻量级 Agent 系统
3. Attention 融合(推荐)
class AttentionFusion(nn.Module):
def __init__(self, feature_dim):
super().__init__()
self.attn = nn.MultiheadAttention(
embed_dim=feature_dim,
num_heads=4,
batch_first=True
)
def forward(self, features):
x = torch.stack(features, dim=1)
attn_out, _ = self.attn(x, x, x)
return attn_out.mean(dim=1)
优势:
- 显式建模跨模态依赖
- 对噪声模态更鲁棒
五、完整的多模态环境感知模块
class MultiModalPerception(nn.Module):
def __init__(self, state_dim):
super().__init__()
self.visual_encoder = VisualEncoder()
self.text_encoder = TextEncoder()
self.state_encoder = StateEncoder(state_dim)
self.fusion = AttentionFusion(feature_dim=256)
def forward(self, image, text, state):
v_feat = self.visual_encoder(image)
t_feat = self.text_encoder(text)
s_feat = self.state_encoder(state)
return self.fusion([v_feat, t_feat, s_feat])
输出的 Environment Embedding 可以直接用于:
- 强化学习 Policy Network
- 行为规划模块
- LLM Agent 的环境上下文增强
六、在 Agent 系统中的实际应用
1. 强化学习 Agent
state_embed = perception(image, text, state)
action = policy_network(state_embed)
2. LLM + Agent 结合
env_summary = env_embedding_to_text(state_embed)
prompt = f"""
当前环境状态:
{env_summary}
请规划下一步动作。
"""
七、工程实践中的关键问题
1. 模态缺失怎么办?
- 使用 Mask Attention
- 引入模态存在标识(Modality Token)
2. 性能瓶颈
- 视觉模型蒸馏
- 离线特征缓存
- 多模态异步更新
3. 训练策略
- 单模态预训练
- 再进行多模态联合微调
- Curriculum Learning(逐步增加模态)
八、总结与展望
多模态融合并不是“锦上添花”,而是 Agent 走向复杂真实环境的必经之路。
未来趋势包括:
- 多模态世界模型(World Model)
- LLM 驱动的感知-决策一体化 Agent
- 具身智能中的跨模态自监督学习
真正强大的 Agent,不是算得快,而是“看得懂世界”。
多模态融合为智能体提供了一种更接近真实世界的环境感知方式,使 Agent 能够从视觉、语言和结构化状态等多源信息中构建统一、抽象且鲁棒的环境表示。通过合理的特征编码与融合策略,智能体不仅能提升对复杂环境的理解深度,还能显著增强决策的稳定性与泛化能力。从工程实践来看,多模态感知模块已逐渐成为高性能 Agent 系统的基础组件。随着算力、模型结构和自监督学习方法的不断进步,未来的智能体将具备更强的跨模态理解与推理能力,真正实现从“被动感知”向“主动理解环境”的演进。

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)