基于 STM32 的车牌识别系统【开源免费下载】

基于 STM32 的车牌识别系统【开源免费下载】
在智慧交通和物联网快速发展的背景下,车牌识别(LPR, License Plate Recognition)已成为停车场管理、社区门禁、道路监控等场景的核心技术之一。虽然传统车牌识别多依赖 PC 或边缘 AI 计算单元,但在资源受限、成本敏感的场景中,借助 STM32 + 外接摄像头 + 嵌入式轻量化算法 中低成本方案仍然非常具有应用价值。
本文将介绍一个基于 STM32 微控制器 的车牌识别系统设计方案,包括系统架构、硬件选型、软件流程、图像处理算法以及调试要点,为嵌入式 AI 入门和工程落地提供参考。
源码分享
直接放到之前写的文章里了,免费开源,下载学习即可。
https://blog.csdn.net/weixin_52908342/article/details/155576540
一、项目概述
本项目构建一个低成本、低功耗、可嵌入式部署的车牌识别系统。系统通过摄像头采集车辆图像,经由 STM32 进行图像预处理和特征提取,再将提取后的关键数据送入轻量车牌识别模型,最终解析出车牌号码。
该系统主要应用于以下场景:
- 小区门禁、固定车位管理
- 道闸系统停车收费
- 校园/园区车辆进出管理
- 低端 IoT 设备快速部署
由于 STM32 本身算力有限,本项目采用 轻量化识别方案:在 MCU 侧完成图像预处理 + 车牌定位,通过外接 AI 协处理或者本地字符识别(如 SVM/模板匹配)完成最终车牌识别,效率高、成本低。

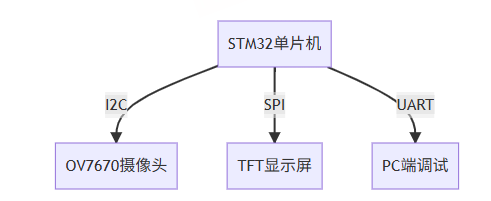
二、系统整体架构
系统主要由以下模块构成:
1. 摄像头模块(OV2640/GC0328)
负责捕捉车辆图像,支持 JPEG 输出格式,便于 STM32 解码与处理。
2. STM32 主控(推荐 STM32F407 / H743)
承担以下核心功能:
- 摄像头数据采集(DCMI)
- 图像预处理(灰度化、边缘检测)
- 车牌区域定位(颜色阈值、Sobel 边缘、形态学)
- 字符切割与简单识别
- 与外设通讯(UART/WiFi/4G)
3. 外接存储(SD 卡 / PSRAM)
用于缓存图像帧和处理过程中间结果。
4. 识别结果输出模块
如:
- OLED 显示车牌
- UART 传输至上位机
- 通过 ESP8266/4G 模块上传云端
- 控制道闸开关
典型架构图
摄像头 → STM32 → 图像预处理 → 车牌定位 → 字符识别 → 通信输出 / 控制执行机构
三、硬件设计要点
1. STM32 选型建议
| 系列 | 优点 | 推荐用途 |
|---|---|---|
| STM32F4 | DCMI接口 + 168MHz + 192KB SRAM | 常规低端车牌识别系统 |
| STM32H7 | 480MHz + 大容量RAM + 更强DSP能力 | 采用更复杂算法场景 |
| STM32F1 | 无 DCMI,不推荐直接处理图像 | 可作为辅助控制板使用 |
F4 系列即可实现基本车牌定位与字符识别。
2. 摄像头接口设计(以 OV2640 为例)
- DCMI 数据接口
- I2C 控制摄像头寄存器
- XCLK 由 STM32 提供
- 推荐使用 JPEG 模式(减少数据量)
注意:DCMI 引脚需高速信号布线,保证信号完整性。
3. 电源及稳定性设计
- 图像处理耗电较高,保证 3.3V 稳定供电
- 摄像头模块需独立滤波
- 系统建议加入 ESD 保护(户外场景)
四、软件方案设计
1. 图像采集与处理流程
DCMI 采图 → JPEG 解码 → 灰度化 → 二值化 → 边缘检测 → 车牌定位 → 字符分割 → 字符识别
2. 关键图像算法实现
(1) 灰度化
简化计算:
Gray = (R*30 + G*59 + B*11) / 100
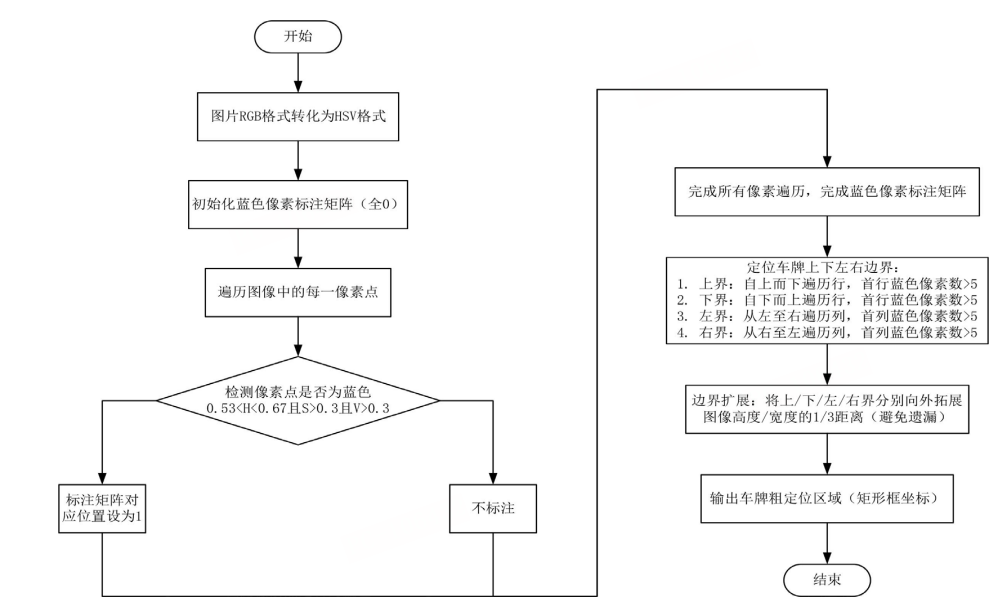
(2) 车牌颜色检测(蓝牌)
使用 HSV 阈值分割:
H: 100~140
S: 80~255
V: 50~255
筛选出蓝色区域。
(3) 边缘检测
Sobel 算子:
G = |Gx| + |Gy|
STM32 使用 ARM CMSIS-DSP 可提高效率。
(4) 车牌区域定位
依据以下规则:
- 长宽比约为 4:1
- 车牌区域边缘密集
- 面积需达到阈值
- 采用形态学闭操作增强连通性
(5) 字符切割
通过垂直投影定位每个字符:
统计每列黑色像素数量 → 判断字符分界
(6) 字符识别
可选方案:
- 模板匹配(简单高效)
- SVM 分类器
- 小型神经网络(如 TinyML + CMSIS-NN)
五、通信与系统集成
STM32 识别车牌后,支持多方式输出:
1. 串口输出
便于上位机接收处理。
2. WiFi/ESP8266 上传
通过 MQTT / HTTP 上传云服务。
3. 控制定制设备
如道闸、摄像灯光、语音播报等。
六、系统调试经验总结
1. 图像数据量大,需合理管理内存
- 使用 DMA + 缓冲区减少 CPU 占用
- 采用 QVGA 分辨率(320x240)提升帧率
2. 车牌定位比字符识别更重要
抠图准确率直接影响最终结果。
3. 户外光照变化大,需要自适应阈值
建议采用 Otsu 或动态阈值处理。
4. 提前构建多种模板或训练数据
提升不同车牌字体/颜色的识别率。
七、项目扩展方向
进一步升级可实现:
1. 使用 STM32H7 + CMSIS-NN 部署轻量 CNN
实现 MCU 本地深度学习模型推理。
2. 加入边缘 AI 芯片(如 Kendryte K210)
STM32 控制 + K210 识别,实现高精度 LPR。
3. 增加夜间红外补光 + ISP 预处理
提高复杂环境下的识别质量。
八、总结
基于 STM32 的车牌识别系统以其低成本、低功耗、可嵌入式部署等优势,在物联网和智慧交通领域具有广泛应用价值。本项目介绍了从硬件选型、系统架构、图像算法到通信模块的完整实现路径,可作为实际工程搭建的参考模板。
如果你正在进行嵌入式 AI 或图像识别类项目,STM32 车牌识别方案是一个非常好的入门方向,同时也是嵌入式系统结合 AI 的典型实践案例。

- 点赞
- 收藏
- 关注作者
评论(0)