基于 STM32 的智能车库设计[开源]

基于 STM32 的智能车库设计与实现:从自动停车到智能计费的完整方案
在智慧城市与物联网高速发展的背景下,传统车库管理系统已无法满足用户对自动化、便利性与数字化的期待。基于 STM32 微控制器,我们可以构建一套功能完整、成本可控、可扩展性强的“智能车库系统”,实现 刷卡自动停车、自动分配车位、路径规划、抓拍、计费 等一系列智能化功能。
本文将从系统架构、硬件设计、软件逻辑到关键技术实现进行全方位解析,可为学生课程设计、项目实战或企业原型研发提供参考。
源码分享
直接放到之前写的文章里了,免费开源,下载学习即可。
https://blog.csdn.net/weixin_52908342/article/details/155576070
一、项目概述
本项目基于 STM32 系列 MCU(推荐 STM32F103 或 STM32F407)构建一个智能车库控制系统。系统通过 刷卡识别车主、步进电机驱动升降杆和转盘、摄像头拍照、超声波定位车辆、算法规划停车路径、数据库自动分配车位并进行停车计时收费,实现完整的智能车库流程。
系统具有以下特点:
- 全自动化停车流程:刷卡 → 摄像头抓拍 → 分配车位 → 引导停车 → 自动计费
- 低成本可实现:基于 STM32、步进电机、超声波模块即可完成核心功能
- 可扩展性强:支持联网、云端车牌识别、微信小程序查看停车状态等
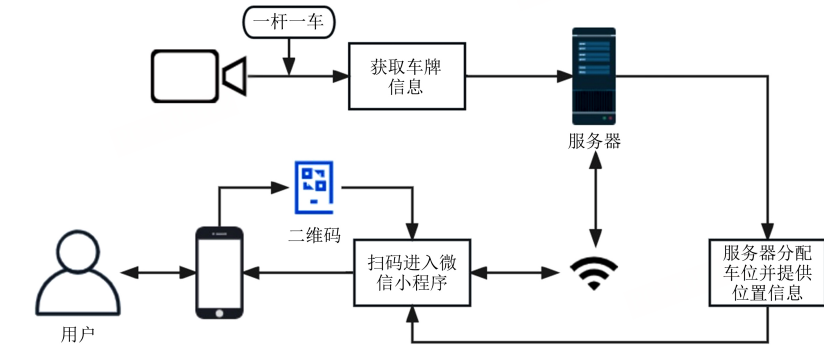
二、系统整体架构设计
系统主要包含 信息采集层、控制执行层、算法层、数据服务层、交互层 五大模块:
┌────────────────────────────┐
│ 上位机 / 云服务 │
│ 车位数据库 | 停车计费逻辑 | 车牌存储 │
└────────────────────────────┘
▲
│
┌────────────────────────────┐
│ STM32 MCU │
│ 身份识别 | 路径规划 | 电机控制 | 计时 │
└────────────────────────────┘
▲ ▲
│ │
┌──────────┐ ┌────────────┐
│ 信息采集层 │ │ 控制执行层 │
│ 超声波 | 摄像头 │ │ 步进电机 | 伺服 │
└──────────┘ └────────────┘
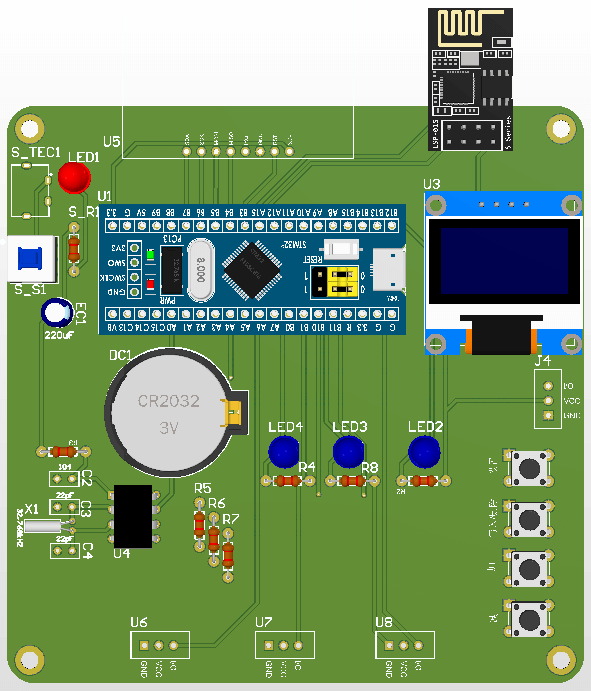
三、硬件设计与模块说明
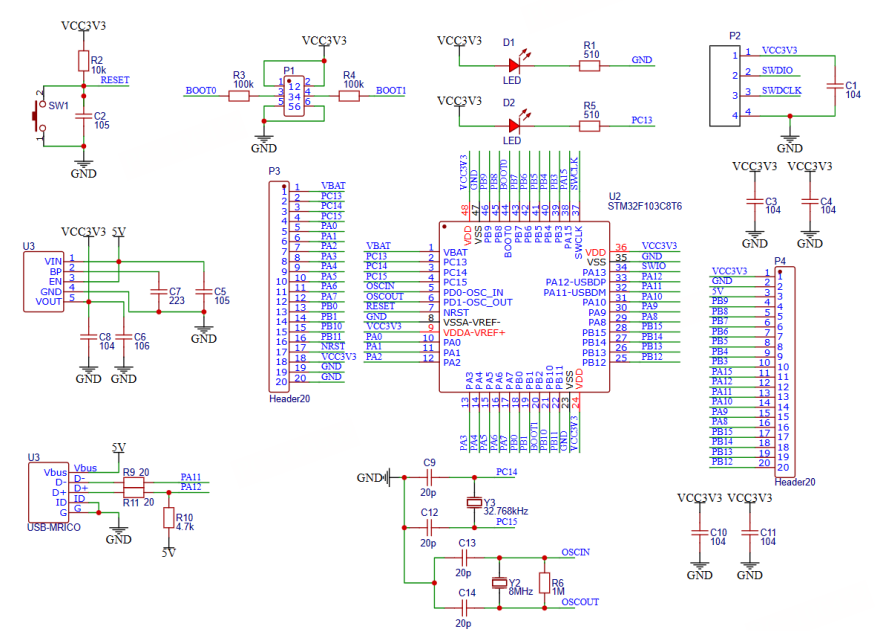
1. 核心控制器:STM32
推荐 MCU:
- STM32F103C8T6:性价比高,适合课程设计
- STM32F407:计算能力强,适合需要更多外设和摄像头接口的场景
主要负责:
- 步进电机驱动
- 刷卡识别的数据处理
- 车位路径规划算法
- 传感器数据采集
- 收费计时
- 与上位机的串口/WiFi 通信
2. 刷卡系统(RFID)
使用 MFRC522 或 ID 卡读卡器。
流程:
- 用户刷卡
- MCU 读取 UID
- 查询车主信息
- 放行/扣费/记录时间
3. 摄像头模块
可选:
- OV7670
- GC0308
- ESP32-CAM(若支持 WiFi 图传)
功能:
- 进入时拍照留存
- 可用于后期车牌识别拓展
4. 步进电机 + 驱动模块
- 驱动进出闸杆
- 控制停车平台旋转
- 引导车辆至指定区域
常用驱动:
- A4988
- TB6600(大扭矩场景)
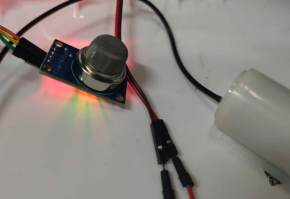
5. 超声波测距(HC-SR04)
用于:
- 检测车是否到位
- 车位是否空闲
- 辅助路径规划与避障
6. 计费模块
通过 STM32 计时器或 RTC:
- 记录停车开始时间
- 离开时计算总时长
- 输出费用(可通过屏幕展示)
四、软件逻辑与核心算法
1. 系统主流程
刷卡 → 身份验证 → 摄像头拍照 → 自动分配车位 → 路径规划 →
电机引导进场 → 超声波检测入位 → 开始计时 →
刷卡离场 → 计费 → 抬杆退出
2. 车位自动分配算法
可使用“最短路原则”或“空闲优先原则”:
int allocate_park() {
for (int i = 0; i < MAX_PARK; i++) {
if (park[i].status == EMPTY) {
return i;
}
}
return -1; // full
}
可扩展为:
- 距离入口最短
- 层级最优
- 预留 VIP 区域
3. 路径规划算法(简化版)
如果是小车模型或移动平台,则可采用:
- BFS 网格寻路
- Dijkstra 最短路径
- 或简单“直走-转弯-入库”逻辑
示例伪代码:
path = bfs(start, target);
for(step in path){
motor_run(step.direction, step.distance);
}
4. 步进电机控制
使用 TIM3/TIM4 产生脉冲:
void step_motor_run(int steps){
for(int i=0;i<steps;i++){
HAL_GPIO_WritePin(STEP_PIN, GPIO_PIN_SET);
HAL_Delay(2);
HAL_GPIO_WritePin(STEP_PIN, GPIO_PIN_RESET);
HAL_Delay(2);
}
}
5. 停车计费逻辑
fee = (leave_time - enter_time) / 3600.0 * PRICE_PER_HOUR;
支持多种计费策略:
- 首小时固定费用
- 24 小时封顶
- 会员折扣
五、系统调试与测试
1. 功能测试
- 刷卡识别成功率 > 99%
- 超声波测距误差 ±1cm
- 步进电机重复定位误差 < 1mm
2. 场景测试
- 车辆未停正 → 自动报警
- 车位满 → 屏幕提示“满位”
- 多辆车同时入场 → 队列调度
六、扩展功能(可进一步升级)
- 车牌自动识别(OCR/深度学习)
- 微信小程序查看车位占用情况
- 云端计费记录同步
- 自动泊车机器人对接
- 多层车库调度系统
七、总结
基于 STM32 的智能车库系统将传统机械式停车场升级为“智能管理新模式”。通过 刷卡识别、摄像头拍照、步进电机自动停车、超声波检测、路径规划与计费系统 的协同工作,实现了从“进场 → 停车 → 离场”的全流程自动化。
本项目不仅适合作为大学嵌入式课程设计、毕设项目,也可以作为中小企业快速落地的智慧车库解决方案的原型。未来结合 AI 车牌识别与云端管理,将具备更强的商业化价值。

- 点赞
- 收藏
- 关注作者
评论(0)