基于STM32 的智能导盲拐杖项目源码分享【源码分享】

【摘要】 基于 STM32 的智能导盲拐杖项目,是一个非常典型的“多传感器融合 + 嵌入式控制 + 人机交互”的 IoT 辅助设备示例。它不仅具有工程价值,也有重要的社会意义。通过本文的架构讲解、模块选型和软件思路,你可以快速搭建原型,并进一步扩展成一个可投入使用的辅助产品。
基于STM32的智能导盲拐杖:从方案设计到实现细节的完整解析
随着嵌入式系统与物联网技术的发展,传统的导盲工具正在被赋予更多智能能力:感知周围环境、检测危险、提供语音提示,甚至与手机联动。本文将带你深入解析一款基于 STM32 的智能导盲拐杖的完整设计方案,包括架构原理、模块选型、核心算法以及工程实现,适合需要做嵌入式课设、科研项目或实际产品开发的读者。
源码分享
免费开源,源码见:
https://blog.csdn.net/weixin_52908342/article/details/155538716
一、项目背景与设计目标
传统导盲拐杖虽然经济可靠,但功能单一,只能通过物理触碰探知前方障碍。其不足主要包括:
- 反应距离短:必须接触到障碍物才能感知。
- 无法感知上方/侧方障碍:如树枝、突出物等。
- 无法主动发出提示:使用者只能被动感受。
基于 STM32 的智能导盲拐杖旨在解决这些问题,通过多传感器融合、语音提示和无线通信,使拐杖成为主动感知和反馈的智能辅助设备。设计目标如下:
- 可靠的障碍物检测:前方、上方、侧向三维空间感知。
- 跌倒/异常姿态识别:监测使用者状态。
- 实时语音反馈:通过蜂鸣器或语音模块提示。
- 低功耗与长续航:满足全天使用需求。
- 可扩展通信能力:如 Bluetooth/LoRa/NB-IoT。

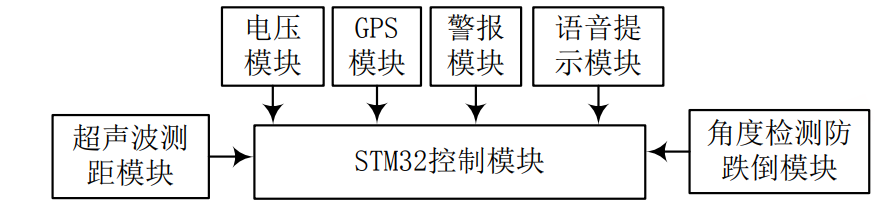
二、整体系统架构设计

智能导盲拐杖由五大部分组成:
用户交互层:语音提示 / 振动马达 / LED
传感器系统:超声波、红外 ToF、陀螺仪/加速度、环境传感器
控制核心:STM32F103/STM32G431 等 Cortex-M3/M4 芯片
电源管理:锂电池 + 充电模块(TP4056)+ DC-DC 稳压
通信模块:蓝牙 BLE / ESP8266 / LoRa(可选)
数据流向示意:
传感器采集 → STM32 数据融合与判断 → 提示模块 → 用户反馈
↓
蓝牙/网络上传(可选)
STM32 在此系统中扮演“大脑”的角色:负责任务调度、传感器采集、中断处理、数据计算和输出控制。
三、关键硬件模块选型与功能说明

1. STM32 主控
推荐型号:
- STM32F103C8T6:性价比高,资源够用,资料丰富。
- STM32G431:更低功耗、性能更强、带 DSP 运算(适合融合算法)。
主要外设需求:
- 多路 GPIO 输入输出
- ADC/USART/I2C/SPI
- 定时器用于 PWM(振动马达 / 蜂鸣器)
- 低功耗模式
2. 障碍物检测模块
① 超声波传感器(HC-SR04 或 A02YYUW)
- 负责前方距离测量
- 检测距离可达 4–7m
- 对透明物体敏感度较低,但仍是可靠基础方案
② ToF 激光测距模块(VL53L0X / VL53L1X)
- 精度高,可用于“上方”检测,比如树枝或悬挂物
- 不受光线影响
③ 红外反射式传感器
- 检测脚边低矮障碍
- 成本低,能在短距离表现出色
3. 姿态检测模块(MPU6050 / ICM20602)
- 检测拐杖是否倾倒
- 识别使用者是否摔倒
- 可用于判断移动方向,辅助导航
4. 提示系统
- 蜂鸣器(有源/无源):简单提示,功耗低
- 振动马达:适合安静环境
- 语音模块(DFPlayer / LD3320 / ESP32TTS):支持合成语音提醒
5. 通信模块(可选)
- BLE (HM-10):与手机通讯,可上传位置信息
- LoRa:适合远距离定位或报警
- ESP8266/WiFi:用于云端监控
四、软件设计与系统流程控制
核心软件框架可采用 任务调度状态机 或 裸机 + 中断 设计。
1. 系统主流程
系统初始化 → 传感器检测循环
↓
数据融合与判断
↓
发出语音/振动/蜂鸣提示
↓
蓝牙/WiFi 上报数据(可选)
2. 传感器数据融合算法(关键)
智能导盲拐杖的关键在于 避免单一传感器误检,所以通常采用:
多传感器融合策略:
| 场景 | 使用传感器 | 判断逻辑 |
|---|---|---|
| 前方障碍 | 超声波 + ToF | 两者距离差 < 20cm 才认定为障碍 |
| 上方障碍 | ToF | 小于设定阈值即提示 |
| 地面障碍 | 红外反射 + 超声波 | 红外触发时用超声波二次确认 |
| 跌倒检测 | MPU6050 | 角速度 + 加速度 > 阈值 |
可采用中值滤波、卡尔曼滤波等方法降低抖动。
3. 提示系统逻辑
根据距离不同发出不同提示:
距离 > 150cm:无提示
150cm–80cm:低频蜂鸣
80cm–30cm:中等频率蜂鸣 + 振动
< 30cm:高频蜂鸣 + 语音提醒 “危险!前方有障碍物!”
根据需要加入更复杂语音逻辑。
五、低功耗设计
对导盲拐杖而言,续航是关键:
关键低功耗策略:
- 使用 STOP 模式 降低 STM32 功耗
- 超声波不连续测量,而是 间歇性采样
- 传感器休眠控制
- 语音模块仅在告警时启动
- 使用 18650 锂电池 + 降压模块提高能量密度
实际测试可达到 24–48 小时连续使用。
六、工程结构与产品化考虑
为了能真正投入使用,必须兼顾工业设计:
1. 防水性
- 超声波安装在前端专用开孔处,加硅胶圈防尘
- PC 外壳 + 防水按键
2. 结构设计
- 传感器布置需覆盖:前、上、下
- 重量控制在 350–450g
3. 可维护性
- 模块化结构:主控板、传感器板、电源板分离
- 方便维护与升级
七、实测体验与优化方向
在真实测试中,智能导盲拐杖表现良好,但也存在如下可优化点:
- 超声波对不规则物体的反射不稳定,建议引入双超声波
- 在户外阳光下,红外传感器性能下降
- ToF 模块在雨雾天气测距波动,需要滤波算法优化
- 联网版本在地下停车场等弱信号区域连接不稳定
可进一步加入:
- GPS + 北斗定位模块
- AI 语音助手(离线语音识别)
- 摄像头 + 轻量级目标识别模型(如 MobilenetV3)

结语
基于 STM32 的智能导盲拐杖项目,是一个非常典型的“多传感器融合 + 嵌入式控制 + 人机交互”的 IoT 辅助设备示例。它不仅具有工程价值,也有重要的社会意义。通过本文的架构讲解、模块选型和软件思路,你可以快速搭建原型,并进一步扩展成一个可投入使用的辅助产品。

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)