面向大规模多智能体系统的动态领导者选举与一致性协议优化机制研究

面向大规模多智能体系统的动态领导者选举与一致性协议优化机制研究
近年来,多智能体(Multi-Agent)系统已经从理论探索走向可落地应用,例如智能仓储机器人群调度、自动驾驶车队协同、智能电网调度以及分布式金融决策系统。随着智能体数量的增加,如何在异步网络、潜在故障、节点掉线或网络抖动场景下保持决策一致性成为系统能否稳定运行的核心挑战。
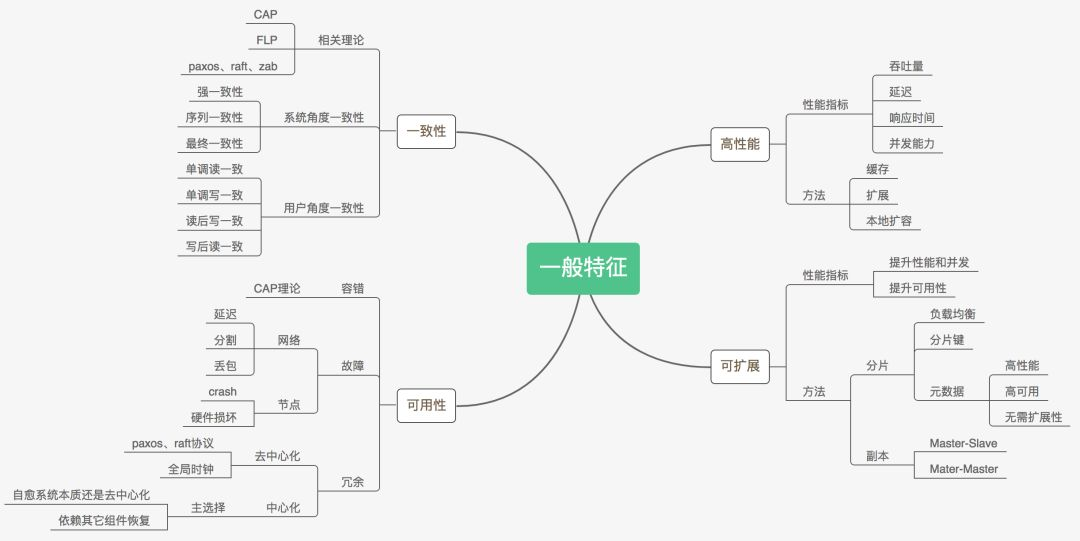
我在工程实践中逐渐意识到:多智能体系统的核心不是智能,而是协同与共识。过度强调模型精度,而忽略分布式一致性,最终系统必然会在真实环境下失控。为了解决多 Agent 的协同一致性问题,传统分布式一致性协议如 Paxos、Raft 依然具有极高的参考与改造价值。
一、为什么多 Agent 系统需要一致性协议?
自然智能的群体行为(例如蚂蚁协作、蜜蜂择巢决策、迁徙队列中的领头机制)都存在某种隐含的“共识形成过程”。人工多智能体系统如果缺乏一致性设计,会出现以下问题:
| 场景 | 问题表现 | 影响 |
|---|---|---|
| 机器人协同搬运 | 多机器人同时改变目标点 | 撞车、死锁 |
| 金融多代理决策 | 策略节点意见不一致 | 风控失效、资产损失 |
| 无人机编队 | 领航信息不一致 | 队形瓦解 |
| 智慧交通 | 多路口调度冲突 | 交通拥堵甚至事故 |
因此,一个足够健壮的智能体协同系统必须具备:
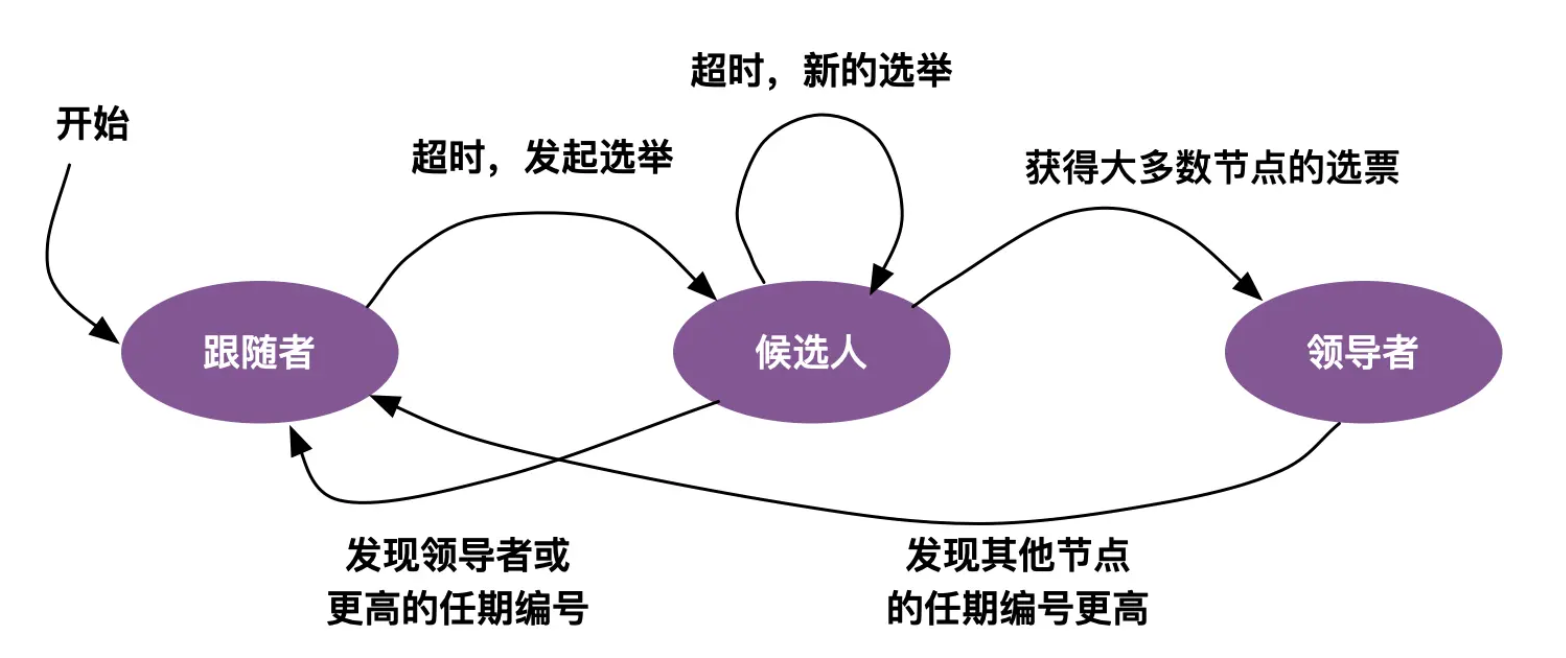
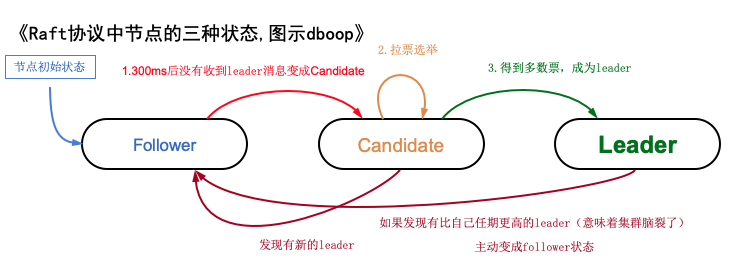
- 领导者选举能力
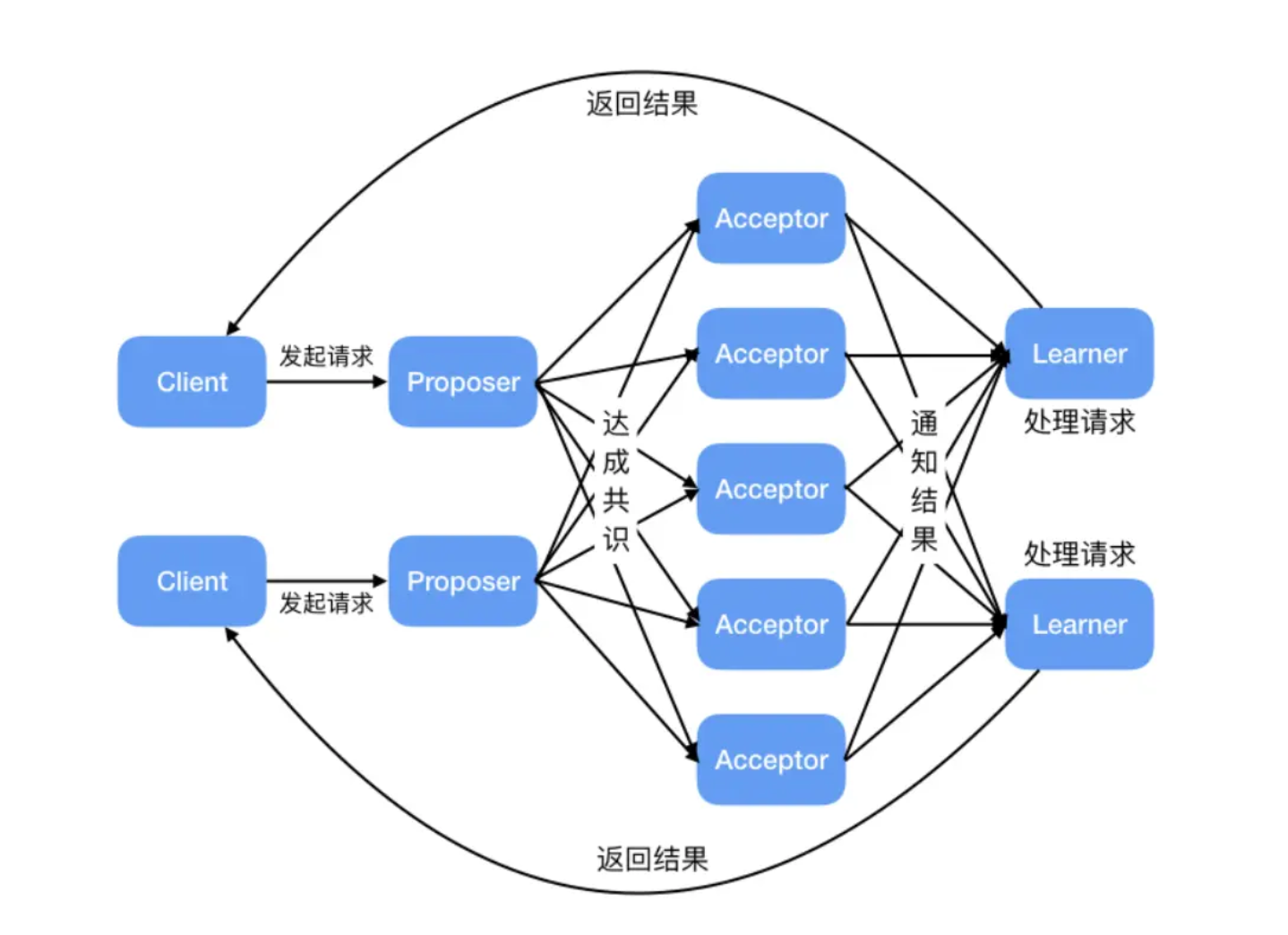
- 多节点提案与投票机制
- 故障节点可替代
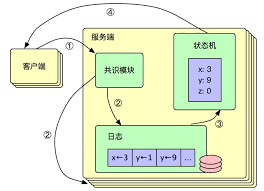
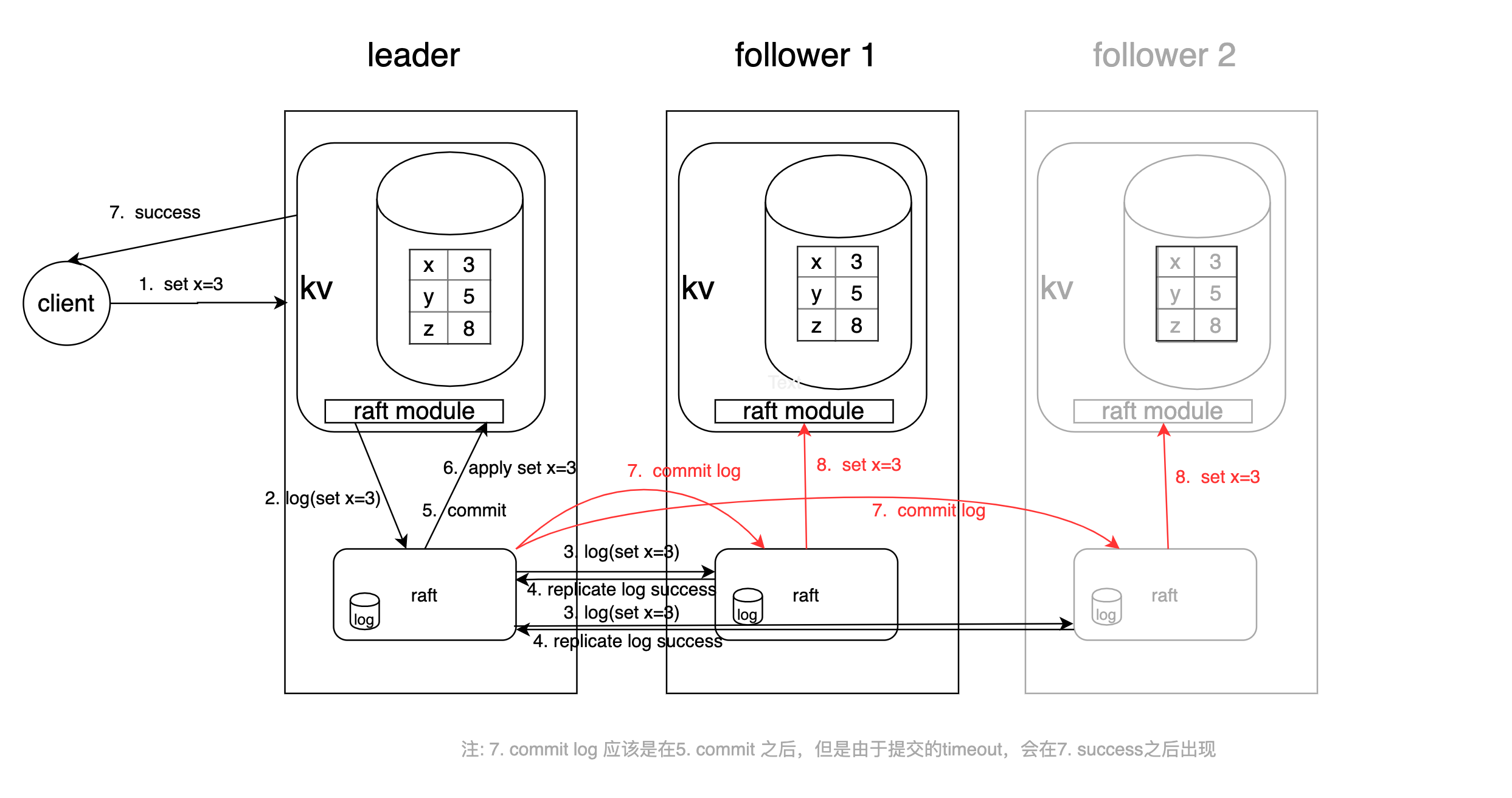
- 日志或指令严格一致
这就是 Paxos 与 Raft 仍然被视为“分布式共识基础设施”的原因。
二、Paxos 与 Raft 的适用性比较(基于个人实践)
以下是我对两者结合 AI 多 Agent 实践的评价,而不是书本理论:
| 维度 | Paxos | Raft | 工程建议 |
|---|---|---|---|
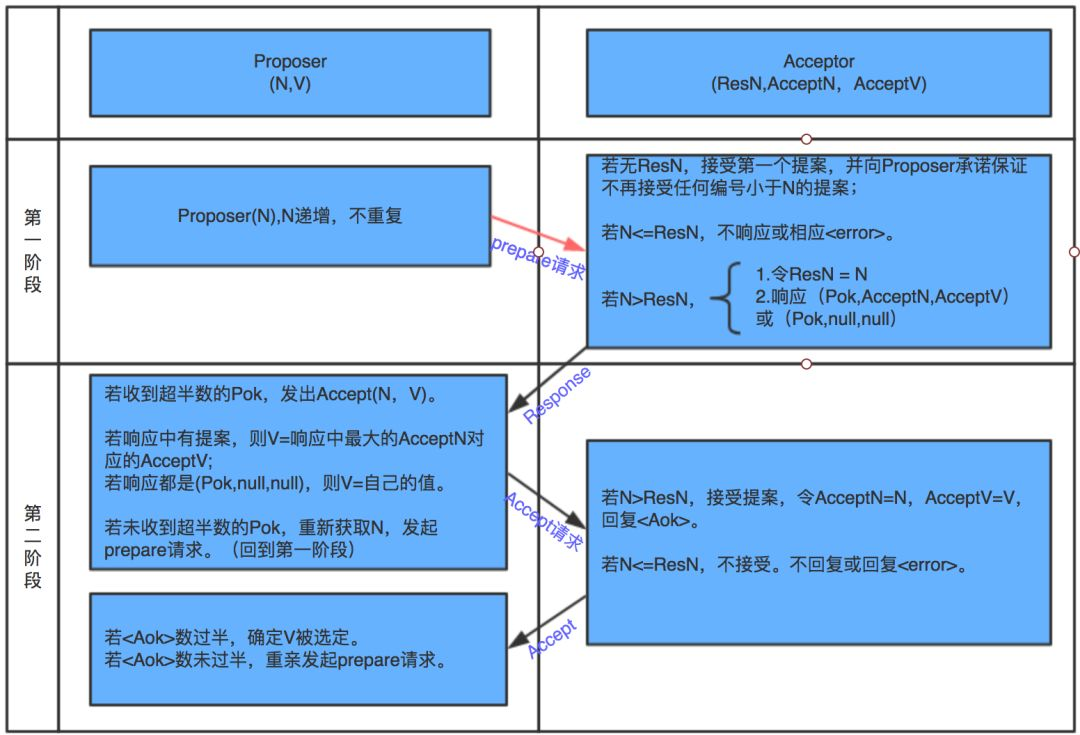
| 学习难度 | 难度陡峭、论文风格抽象 | 可读性更强、思路清晰 | 企业更易落地 Raft |
| 领导者机制 | 灵活但复杂 | 固定 Leader、逻辑简单 | 推荐易维护系统使用 Raft |
| 容错切换 | 复杂 | 清晰、可快速恢复 | 对实时系统更友好 |
| 日志复制 | 有但难理解 | 明确、结构直观 | 适合 Agent 状态同步 |
| 实际应用 | 偏理论与特殊场景 | Kubernetes、etcd、TiKV 等 | 主流工业共识首选 Raft |
结论:Paxos 适合顶尖研究场景,而 Raft 更适合规模化工程落地。
在智能体系统中,如果节点数量大于 5 且具备实时性要求,Raft 明显更具优势。
三、将 Raft 思想用于多 Agent 协同的核心要点
我的工程经验中,直接照搬 Raft 并不可行,需要做智能体场景改造:
| 原 Raft 机制 | 在多 Agent 场景的改造建议 |
|---|---|
| 日志复制 | 替换为“共享任务/意图序列”同步 |
| Leader 选举 | 可加入“能力权重 + 健康评分”策略 |
| 心跳检测 | 扩展为状态、传感器、位置、算力维度 |
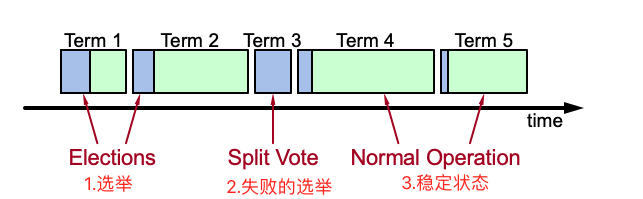
| 任期 (Term) | 用于记录“策略版本迭代号码” |
例如智能车队中,如果仅用定时心跳检测,会忽略“感知衰减、路径可信度、能耗风险”等因素,因此需要增维度一致性验证机制。
四、简单可运行的 Python Raft 风格 Agent 协同示例(最小可行版本)
说明:
- 仅为学习演示,不包含完整网络通信、日志压缩、持久化与异常注入
- 重点演示 Leader 选举与一致任务提交
4.1 环境依赖
pip install fastapi uvicorn pydantic requests
4.2 代码示例:简化版 Raft 风格 Agent 共识
agent_node.py
import random
import time
import requests
from threading import Thread
from fastapi import FastAPI
from pydantic import BaseModel
app = FastAPI()
state = {
"role": "follower",
"term": 0,
"leader": None,
"log": []
}
node_id = random.randint(1000, 9999)
peers = [] # 其他节点地址,如 ["http://localhost:8001", "http://localhost:8002"]
class Task(BaseModel):
command: str
term: int
@app.get("/heartbeat")
def heartbeat(term: int):
if term >= state["term"]:
state["term"] = term
state["role"] = "follower"
return {"status": "ok"}
@app.post("/append")
def append(task: Task):
if task.term >= state["term"]:
state["log"].append(task.command)
return {"status": "committed"}
return {"status": "reject"}
def start_election():
state["role"] = "candidate"
state["term"] += 1
votes = 1 # 自己一票
for peer in peers:
try:
res = requests.get(f"{peer}/heartbeat", params={"term": state["term"]})
if res.status_code == 200:
votes += 1
except:
pass
if votes >= (len(peers) + 1) // 2 + 1:
state["role"] = "leader"
state["leader"] = node_id
print(f"Node {node_id} 成为 Leader")
else:
state["role"] = "follower"
def heartbeat_loop():
while True:
if state["role"] == "leader":
for peer in peers:
try:
requests.get(f"{peer}/heartbeat", params={"term": state["term"]})
except:
pass
time.sleep(1)
Thread(target=heartbeat_loop, daemon=True).start()
运行多个实例即可模拟节点间选举,每次执行可观察到不同节点成为 Leader。
4.3 扩展方向
若用于真实智能体系统(如无人机群控),还需加入:
- 任务冲突检测
- 节点信誉度
- 动态权重迁移
- 冷/热备份领导机制
- 状态快照(对应 Raft snapshot)
五、个人经验总结
为了避免“概念理解正确但工程完全跑不通”的情况,我在实际项目中总结过以下更具体、更具有现实意义的经验点,它们比理论要更“辣眼睛”,但往往更有用:
5.1 一致性成本永远存在,不要幻想“零额外代价”
多智能体系统的协同一致性本质上是 可靠性换性能 的过程。你想要每个节点决策超级灵活,那么一致性系统一定受限;你想要决策一致且安全,那么系统延迟一定会上升。
因此,一致性协议并不是性能优化工具,而是系统安全底线。
在实际落地中,我一般采用:
| 场景 | 策略选择 |
|---|---|
| 无需全局同步、允许局部偏差 | 放弃一致性,用局部策略 + 信誉约束 |
| 有中度协作关系、偶尔分歧可容忍 | 半一致性:Leader + Lazy Sync |
| 高安全、高精度、不可差错 | 采用强一致性协议 |
换句话说,不要为了“技术看起来高级”而滥用 Paxos/Raft。
5.2 Leader 并非永远最聪明,而是最可靠
很多团队把 Leader 想象成“大脑”,甚至尝试把最高算力、最佳模型效果者设为 Leader,这是典型误区。
在智能体协同场景中,Leader 的首要属性不是智能,而是稳定性。
如果 Leader 过于繁忙、承担多线程规划或计算,很可能变成新的系统瓶颈甚至故障点。
因此,我的建议是:
| 职能 | 适合角色 |
|---|---|
| 复杂策略推演、模型评估 | 智能工作节点 (Compute Agent) |
| 协调、广播、状态管理、容错 | Leader 节点(可相对“笨”) |
这是工程设计中最常见、但被初学者忽视的方向 —— Leader 应该足够可替代。
5.3 必须监控“智能一致性”而不是仅监控“网络一致性”
很多团队仅监控心跳、延迟、丢包率,但完全忽略了任务、策略与价值一致性。
举例说明:
如果五个无人机节点策略模型版本不一致,即便网络连接很好,行动仍然会崩溃。
因此我在项目中加入了以下监控指标:
- 模型版本号一致性
- 策略哈希校验一致性
- 传感器可信度评分一致性
- Agent 内部负载健康度
- 最近 3 次任务决策偏差度
一句话总结:共识验证不能只验证系统状态,还要验证智能状态。
5.4 日志复制不应该只有“日志”,还应包含“因果链路”
传统 Raft 日志复制是记录事件序列,而智能体领域需要更进一步 —— 记录行动的认知理由。
例如无人机在遇到障碍时转弯:
| 普通日志 | 智能体增强日志 |
|---|---|
| turn_left | turn_left ;reason=low_confidence:front_map |
当未来回放协作轨迹时,系统可以评估行为合理性,而不是只能看到行为结果。这在故障分析与安全系统中极其关键。
六、多 Agent 一致性未来演化方向(个人观点)
我认为现有 Paxos 与 Raft 在智能体协作中还属于临界适用阶段,未来至少会往以下三个方向演进:
6.1 从“节点一致性”转向“知识一致性”
未来一致性协议需要同步决策依据,而不仅是同步指令。例如采用:
- 因果图谱(Causal Graph)
- 策略嵌入向量(Policy Embedding)
- 置信度与风险等级同步
6.2 引入策略权重动态迁移一致性
不同 Agent 会有不同能力与专业性,未来可能采用:
- 任务领域投票
- 专家代理(Expert Agent)提案优先
- 信任网络驱动一致性(Trust-aware Consensus)
6.3 结合多模态感知的共识验证
未来系统应该不仅基于 ID 投票,而是基于世界模型(World Model)推断共识,例如:
- 视觉感知一致性
- 地图相似度一致性
- 置信度分布一致性
七、结语
在智能体技术热潮中,我看到大量开发者热衷构建所谓“多 Agent 协作系统”,但最终只是多个独立任务脚本堆叠在一起。真正的协作需要 分布式系统韧性 + 感知一致性 + 策略共识,而 Paxos 与 Raft 正是进入这个领域的钥匙。
共识协议不是智能体系统的加分项,而是底层可靠性基石。
缺乏安全一致性机制的多 Agent 系统,最终只是在做多人单机模式。

- 点赞
- 收藏
- 关注作者
评论(0)