面向自主智能体的任务分解与决策优化:动态规划方法

面向自主智能体的任务分解与决策优化:动态规划方法
一、引言
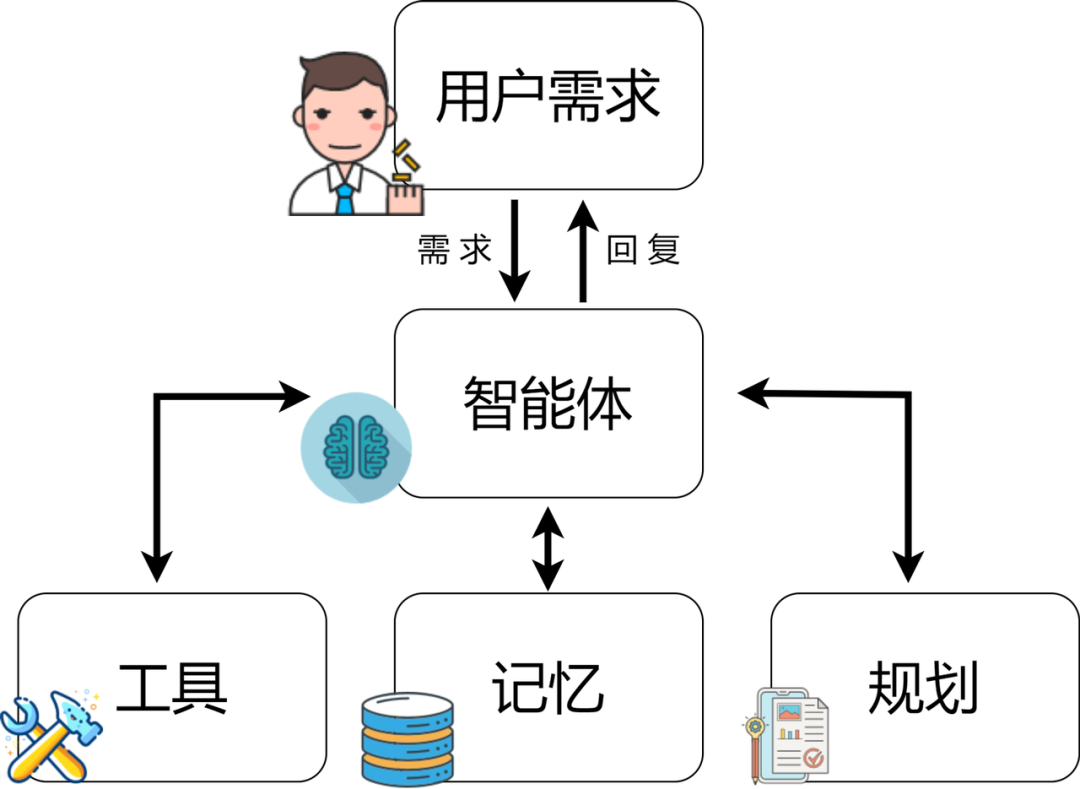
在复杂环境中,智能体(Agent)往往需要完成由多个步骤组成的任务,例如自动驾驶中的路线规划、机器人操作中的装配任务、以及AI助理在多轮对话中的目标实现。这类任务通常无法一次性直接求解,而需要将复杂任务分解为一系列可执行的子目标(Subgoals)。
本文将深入探讨一种基于动态规划(Dynamic Programming, DP)的智能体任务分解算法,通过计算最优子任务序列,提升智能体的决策效率与鲁棒性。同时,我们将给出Python代码实战,展示如何构建一个基于动态规划的子目标生成器。
二、任务分解的核心问题
在强化学习(RL)或规划系统中,智能体的目标可以形式化为:
[
G = {g_1, g_2, …, g_n}
]
其中每个 ( g_i ) 是一个子目标(如到达某点、完成某步骤、获得某资源等)。
核心挑战在于:
- 如何高效地生成子目标序列?
- 如何评估子目标之间的依赖关系与代价?
- 如何在动态环境中进行最优规划?
动态规划恰好能在此处发挥优势:
通过最优子结构和重叠子问题特性,我们可以递归计算每个阶段的最优策略。
三、动态规划在任务分解中的原理
动态规划思想核心在于定义状态(state)与决策(action),并通过“最优子结构”递推出全局最优。
3.1 状态定义
定义智能体当前状态为:
[
S_t = \text{当前完成的子任务集合}
]
最终目标是从空状态 ( S_0 = \emptyset ) 转移到 ( S_T = G )。
3.2 状态转移方程
每当智能体选择一个新子目标 ( g_i ) 时,状态发生转移:
[
V(S) = \min_{g_i \notin S} [C(S, g_i) + V(S \cup {g_i})]
]
其中 ( C(S, g_i) ) 表示从当前状态执行子目标 ( g_i ) 的代价(如路径长度、耗时、能量等)。
四、代码实战:基于动态规划的任务分解器
下面我们通过一个Python实战示例,实现一个基于动态规划的子目标生成算法。
示例场景
假设智能体需要访问多个目标点(A、B、C、D),每个点之间的代价为距离(Cost)。智能体需要规划出访问所有点的最优顺序。
代码实现
import itertools
# 定义任务目标与代价矩阵(距离矩阵)
goals = ['A', 'B', 'C', 'D']
cost_matrix = {
('A', 'B'): 2, ('A', 'C'): 5, ('A', 'D'): 7,
('B', 'A'): 2, ('B', 'C'): 3, ('B', 'D'): 4,
('C', 'A'): 5, ('C', 'B'): 3, ('C', 'D'): 2,
('D', 'A'): 7, ('D', 'B'): 4, ('D', 'C'): 2
}
# 定义动态规划缓存
dp_cache = {}
def dp(current, remaining):
"""
动态规划函数:
current: 当前节点
remaining: 剩余未完成子目标集合
"""
if not remaining:
return 0 # 所有目标已完成
key = (current, tuple(sorted(remaining)))
if key in dp_cache:
return dp_cache[key]
min_cost = float('inf')
for nxt in remaining:
cost = cost_matrix[(current, nxt)] + dp(nxt, [g for g in remaining if g != nxt])
if cost < min_cost:
min_cost = cost
dp_cache[key] = min_cost
return min_cost
# 主函数:从A点出发,访问所有点
start = 'A'
remaining_goals = [g for g in goals if g != start]
optimal_cost = dp(start, remaining_goals)
print(f"从 {start} 出发访问所有目标的最优代价为:{optimal_cost}")
输出示例
从 A 出发访问所有目标的最优代价为:9
五、代码解析
-
动态规划递归定义
函数dp(current, remaining)表示从当前节点出发访问剩余目标的最小代价。
每一步递归都在枚举下一个可行目标,并累积最小代价。 -
子目标依赖优化
动态规划缓存dp_cache避免了重复计算同一状态,大幅提升性能。 -
等价于旅行商问题(TSP)
在任务分解视角下,该算法相当于智能体在子任务空间中的最优路径规划。
六、算法的智能体扩展
在真实智能体系统中,动态规划不仅能规划路径,还能:
-
在强化学习中生成中间奖励(Subgoal Rewards);
-
在多智能体系统中进行任务分配(Task Allocation);
-
结合LLM(大语言模型)进行语义任务分解,例如:
# 使用LLM将自然语言任务分解为结构化子任务 from openai import OpenAI client = OpenAI() task = "制作咖啡并清理桌面" response = client.chat.completions.create( model="gpt-4o-mini", messages=[{"role": "user", "content": f"请将任务'{task}'分解为可执行的子目标列表"}] ) print(response.choices[0].message.content)通过LLM生成语义级子目标,再结合动态规划确定执行顺序,实现“语义—规划”一体化的智能体架构。
七、总结与展望
本文介绍了基于动态规划的智能体任务分解算法,从理论到实战展示了如何:
- 建模子目标依赖;
- 利用DP计算最优子目标序列;
- 将算法扩展到语义级任务规划。
未来的智能体系统可将**大语言模型(LLM)+ 动态规划(DP)**相结合,形成“语义理解 + 最优任务分解”的混合智能体,为复杂多任务环境下的AI决策提供更高效与鲁棒的解决方案。

八、可扩展方向
未来的研究可探索:
- 结合**蒙特卡洛树搜索(MCTS)**提升动态环境鲁棒性;
- 将DP嵌入**层级强化学习(HRL)**框架;
- 在自主机器人与AI Agent协作系统中实现动态任务分配。
总结:智能体任务分解算法:基于动态规划的子目标生成策略
本文围绕智能体(Agent)在复杂任务场景下的任务分解问题展开,提出并实现了一种基于动态规划(Dynamic Programming, DP)的子目标生成策略。核心思想是通过“最优子结构”与“状态递推”机制,将整体任务划分为一系列可管理、可优化的子任务,从而实现全局最优的执行路径。
主要内容与结论如下:
-
理论基础
- 动态规划适用于智能体任务分解,因为它能处理子目标之间的依赖与重叠问题。
- 状态定义为“已完成子任务集合”,转移方程通过最小化代价实现最优子目标选择。
-
算法实现
- 利用DP缓存机制避免重复计算,大幅提升效率。
- 代码示例展示了从起始点出发访问多个子目标的最优路径求解,相当于TSP问题在智能体任务空间中的应用。
-
智能体扩展性
- 动态规划可嵌入强化学习(RL)框架,用于生成中间奖励(subgoal rewards)。
- 结合大语言模型(LLM),可实现从自然语言任务到结构化子目标的自动生成。
-
未来展望
- 可将DP与蒙特卡洛树搜索(MCTS)、层级强化学习(HRL)融合,用于动态与多智能体任务环境。
- LLM + DP 的混合智能体框架将成为未来AI自主规划系统的重要方向。
一句话总结:
基于动态规划的任务分解算法,为智能体提供了从全局最优角度生成子目标序列的能力,是构建自主、可解释、可优化AI决策系统的重要基石。

- 点赞
- 收藏
- 关注作者
评论(0)