【STM32 CubeMX】adxl345加速度传感器

提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
@TOC
前言
本篇文章使用I2C进行通信
在嵌入式系统中,加速度传感器是一种常见的传感器,用于检测物体的加速度或者倾斜角度。ADXL345是一款常用的数字三轴加速度传感器,由ADI(Analog Devices)公司制造。它具有高精度、低功耗和可编程的特点,因此在很多嵌入式应用中被广泛使用。本文将介绍如何在STM32 CubeMX中配置和使用ADXL345加速度传感器。
一、硬件连线
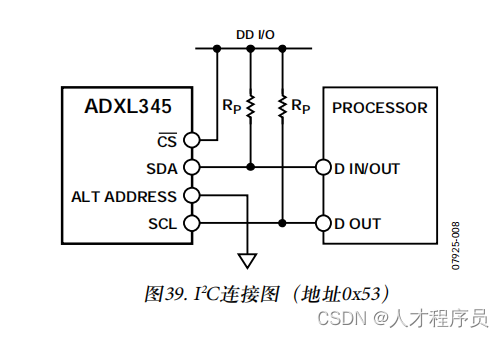
对于I2C adxl345,由于adxl345不仅可以进行I2C通信,也可以进行SPI通信,所以对于I2C通信,我们不仅需要连接VCC、GND、SCL、SDA等常规的引脚,我们还需要对CS片选引脚连到电源3.3V.
我们不仅需要连接CS到电源,我们还需要连接SDO引脚连接到电源。
通过这两步的连线,得到adxl345的读写地址为:写:0x3A 读:0x3B
二、CubeMX配置I2C
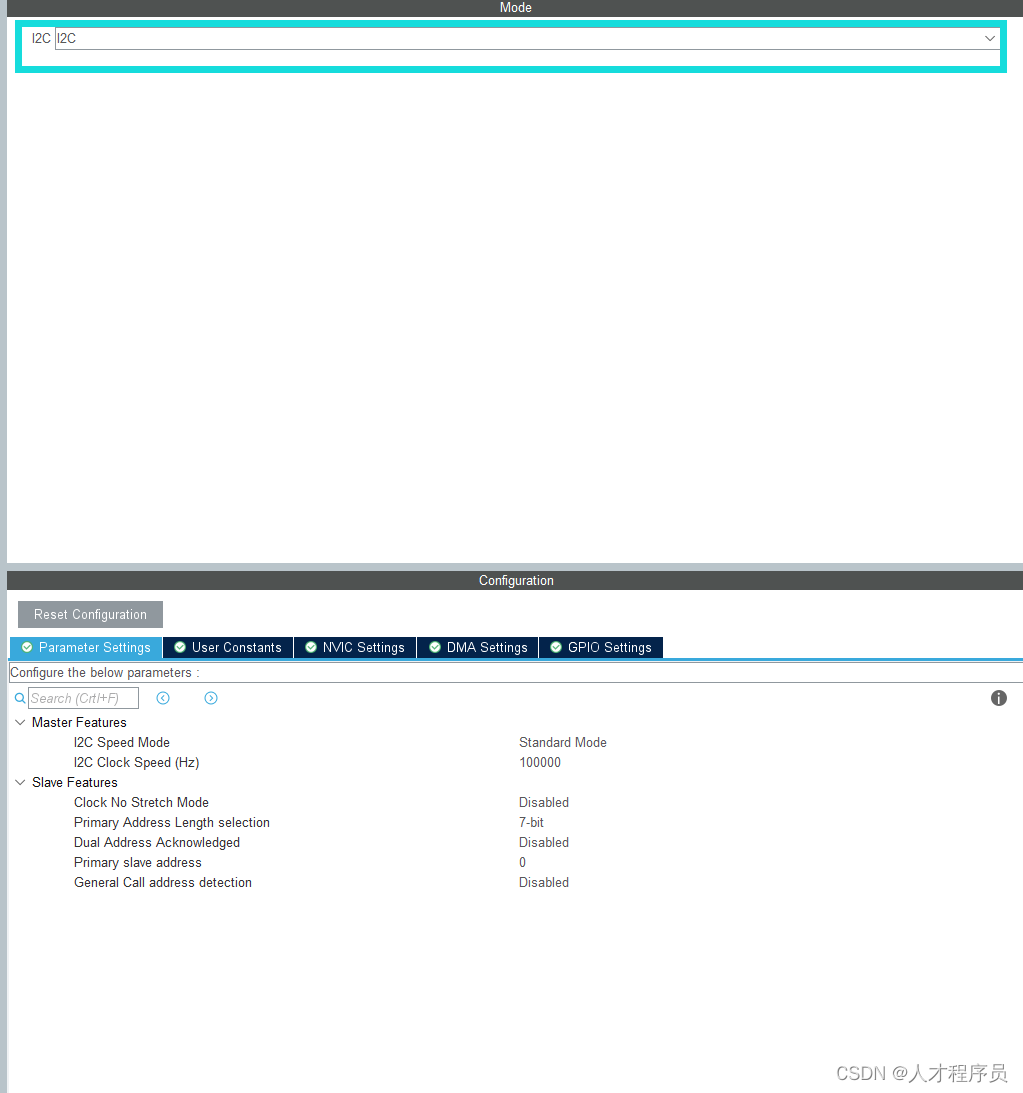
首先,我们选择一个可用的I2C
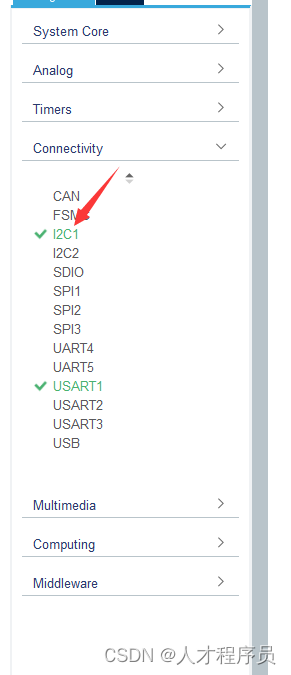
接下来,开启该I2C即可。
三、adxl345的读取操作
3.1 读取adxl345的设备id
阅读芯片手册可得读取0x00地址,我们可以得到他的设备id,并且这个地址只能读,如果得到的数据为0xE5
代表设备读取成功

3.2 初始化adxl345
初始化DATA_FORMAT寄存器
DATA_FORMAT寄存器的各个位的意义如下,我们可以通过组合,然后发送给adxl345的0x31地址
位7 - Self-Test Bit(自检位):
可取值:0或1
0:禁用自检功能
1:启用自检功能。在自检模式下,传感器会在每个轴上施加一个已知的加速度,用于自我测试和校准。
位6 - SPI Bit(SPI接口位):
可取值:0或1
0:选择4线SPI模式(默认模式)
1:选择3线SPI模式
位5 - Interrupt Invert Bit(中断输出反转位):
可取值:0或1
0:中断输出极性不反转(默认)
1:中断输出极性反转。可用于将中断信号与外部器件的期望极性匹配。
位4 - 不使用(保留位)
位3 - Full-Resolution Bit(完整分辨率位):
可取值:0或1
0:禁用完整分辨率模式(默认)
1:启用完整分辨率模式。在完整分辨率模式下,传感器提供最高分辨率的数据输出。
位2 - Justify Bit(数据对齐位):
可取值:0或1
0:左对齐模式
1:右对齐模式(默认)。决定了数据在输出寄存器中的对齐方式。
位1-0 - Range Bits(范围位):
可取值:00、01、10、11
00:±2g
01:±4g
10:±8g
11:±16g。这两位用于选择加速度的测量范围,影响传感器的灵敏度和测量范围。
数据输出速率
我们可以通过设置BW_RATE寄存器来设置数据输出速率。数据输出速率就是输出数据的快慢。
该寄存器是8位的,其中高4位用于设置数据输出速率,低4位用于设置电源模式。
他的地址为0x2C
以下是BW_RATE寄存器中高4位的数据输出速率选项及其对应的取值:
取值 0000:数据输出速率为 0.10 Hz
取值 0001:数据输出速率为 0.20 Hz
取值 0010:数据输出速率为 0.39 Hz
取值 0011:数据输出速率为 0.78 Hz
取值 0100:数据输出速率为 1.56 Hz
取值 0101:数据输出速率为 3.13 Hz
取值 0110:数据输出速率为 6.25 Hz
取值 0111:数据输出速率为 12.5 Hz
取值 1000:数据输出速率为 25 Hz
取值 1001:数据输出速率为 50 Hz
取值 1010:数据输出速率为 100 Hz
取值 1011:数据输出速率为 200 Hz
取值 1100:数据输出速率为 400 Hz
取值 1101:数据输出速率为 800 Hz
取值 1110:数据输出速率为 1600 Hz
取值 1111:数据输出速率为 3200 Hz
低4位用于设置电源模式,但在大多数情况下,这些位应该设置为默认值(0),以选择正常功耗模式。
比如我们要使用100Hz,正常电源模式就要写入0x0A
POWER_CRL寄存器设置
ADXL345的POWER_CTL寄存器用于控制传感器的电源和操作模式。它是一个8位寄存器,每一位都有特定的功能。以下是各位的作用及取值:
位 7(0x80):HSE(High-Speed Enable)
当此位设置为 1 时,传感器工作在高速模式下(3.2 kHz)。否则,传感器在正常模式下工作。
取值:1(高速模式),0(正常模式)。
位 6(0x40):休眠模式
当此位设置为 1 时,传感器进入休眠模式,功耗降低到最低水平。
取值:1(进入休眠模式),0(退出休眠模式)。
位 5(0x20):测量
设置此位为 1 时,传感器开始进行测量。
取值:1(开始测量),0(停止测量)。
位 4(0x10):AUTO_SLEEP
如果启用自动睡眠模式,传感器将在没有活动时自动进入睡眠模式。
取值:1(启用自动睡眠模式),0(禁用自动睡眠模式)。
位 3(0x08):测量
如果测量位设置为 1,传感器处于测量模式。在这种模式下,传感器将执行测量,并在测量完成后将该位清零。
取值:1(正在测量),0(测量结束)。
位 2(0x04):休眠模式
设置此位为 1,将传感器置于休眠模式。
取值:1(休眠模式),0(正常模式)。
位 1(0x02):休眠
如果设置为 1,传感器进入休眠模式。
取值:1(进入休眠模式),0(退出休眠模式)。
位 0(0x01):休眠
与位 1 具有相同的功能,但是当此位和位 1 同时设置时,优先级更高。
取值:1(进入休眠模式),0(退出休眠模式)。
如果你想写入数据,你应该写0x2D地址
如果你想测量的话,你需要设置该寄存器为0x28
禁止中断
在adxl345上面可以看到INT1,INT2,这些是中断引脚,但是我们并不需要使用中断,我们可以使用下面的代码进行禁用:
HAL_I2C_Mem_Write(&hi2c1,WRITE,0x2E,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
HAL_I2C_Mem_Write(&hi2c1,WRITE,0x1E,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
HAL_I2C_Mem_Write(&hi2c1,WRITE,0X1F,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
HAL_I2C_Mem_Write(&hi2c1,WRITE,0X20,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
3.3 读取x、y、z轴的加速度
通过芯片手册可以知道,我们读下面的寄存器即可得到x、y、z轴的加速度
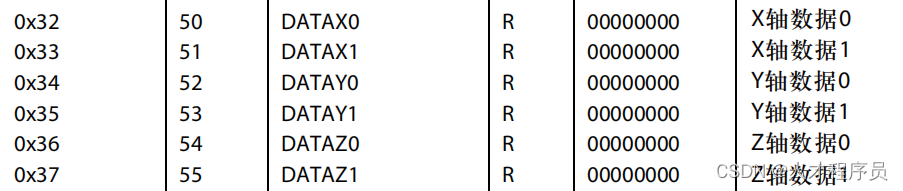
DATAX0为低位,DATAX1为高位。
我们可以通过下面的公式进行转换:
(short)(((uint16_t)readData[1]<<8)+readData[0])
3.4 读取示例
#define WRITE 0x3A
#define READ 0x3B
int BeginADXL345(void)
{
uint8_t id,val;
HAL_I2C_Mem_Read(&hi2c1,READ,0x00,I2C_MEMADD_SIZE_8BIT,&id,1,0xff);
if(id ==0XE5){ //读器件ID,ADXL345的器件ID为0XE5
val = 0x2B; //低电平中断输出,13位全分辨率,输出数据右对齐,16g量程
HAL_I2C_Mem_Write(&hi2c1,WRITE,0x31,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
val = 0x0A; //数据输出速度为100Hz
HAL_I2C_Mem_Write(&hi2c1,WRITE,0x2C,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
val = 0x28; //链接使能,测量模式
HAL_I2C_Mem_Write(&hi2c1,WRITE,0x2D,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
val = 0x00; //不使用中断
HAL_I2C_Mem_Write(&hi2c1,WRITE,0x2E,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
HAL_I2C_Mem_Write(&hi2c1,WRITE,0x1E,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
HAL_I2C_Mem_Write(&hi2c1,WRITE,0X1F,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
HAL_I2C_Mem_Write(&hi2c1,WRITE,0X20,I2C_MEMADD_SIZE_8BIT,&val,1,0xFF);
return 0;
}
return 1;
}
typedef struct ADXLData
{
short x;
short y;
short z;
}ADXLData;
ADXLData readADXL345()
{
uint8_t readData[6] = {0};
ADXLData ret;
int r = HAL_I2C_Mem_Read(&hi2c1,READ,0x32,I2C_MEMADD_SIZE_8BIT,readData,6,1000);
if(r == HAL_OK)
printf("read OK\n");
else
printf("Error %d\n",r);
int16_t x_accel, y_accel, z_accel;
int16_t x_accel_raw, y_accel_raw, z_accel_raw;
ret.x=(short)(((uint16_t)readData[1]<<8)+readData[0]); //DATA_X1为高位有效字节
ret.y=(short)(((uint16_t)readData[3]<<8)+readData[2]); //DATA_Y1为高位有效字节
ret.z=(short)(((uint16_t)readData[5]<<8)+readData[4]); //DATA_Z1为高位有效字节
return ret;
}
/* USER CODE BEGIN 2 */
BeginADXL345();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
data = readADXL345();
printf("X: %hd Y:%hd Z:%hd\n",data.x,data.y,data.z);
printf("angle_X:%hd\n",ADXL345_Get_Angle((double)data.x,(double)data.y,(double)data.z,0));
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
3.5 得到角度
adxl345不仅可以测量各个轴的加速度,还可以根据他们测量出各个轴的角度:
我们可以使用下面这个函数进行角度的计算:
short ADXL345_Get_Angle(float x,float y,float z,uint8_t dir){
float temp;
float res=0; //弧度值
switch(dir){
case 0: //0表示与Z轴的角度
temp=sqrt((x*x+y*y))/z;
res=atan(temp);
break;
case 1: //1表示与X轴的角度
temp=x/sqrt((y*y+z*z));
res=atan(temp);
break;
case 2: //2表示与Y轴的角度
temp=y/sqrt((x*x+z*z));
res=atan(temp);
break;
}
return res*180/3.14; //返回角度值
}
3.6 滤波处理
对于adxl345可能读取的有一定的偏差,这时我们可以使用多次测量取平均值,得到最后一个较为准确的值:
/*读取ADXL345的数据并做滤波处理,读times次再取平均值*/
void ADXL345_Read_Average(short *x,short *y,short *z,uint8_t times){
uint8_t i;
ADXLData data;
*x=0; *y=0; *z=0;
if(times){
for(i=0;i<times;i++){
data = readADXL345();
*x+=data.x; *y+=data.y; *z+=data.z;
HAL_Delay(5);
}
*x/=times; *y/=times; *z/=times;
}
}
总结
本文简要介绍了如何在STM32 CubeMX中配置和使用ADXL345加速度传感器。首先,我们介绍了ADXL345传感器的基本原理和特点,然后详细说明了在CubeMX中如何配置I2C接口以及相关的GPIO引脚。接着,我们演示了如何通过I2C总线与ADXL345通信,并读取其加速度数据。最后,我们提供了一些示例代码和调试技巧,以帮助开发者更好地理解和使用ADXL345传感器。
通过本文的学习,读者可以掌握在STM32嵌入式系统中使用ADXL345加速度传感器的基本方法,为实际项目的开发和应用提供了参考和指导。

- 点赞
- 收藏
- 关注作者
评论(0)