CAN总线与嵌入式系统通信:实时性和可靠性的平衡

CAN总线与嵌入式系统通信:实时性和可靠性的平衡
在嵌入式系统中,通信是一个至关重要的方面。Controller Area Network (CAN) 总线是一种广泛用于嵌入式系统中的通信协议,它在实时性和可靠性之间提供了一个平衡。CAN总线的优势之一是其能够在多个节点之间进行高效通信,同时确保数据的实时传输和可靠性。本文将介绍CAN总线的基本原理,然后通过代码实例演示如何在嵌入式系统中实现CAN通信以实现实时性和可靠性的平衡。
CAN总线基础
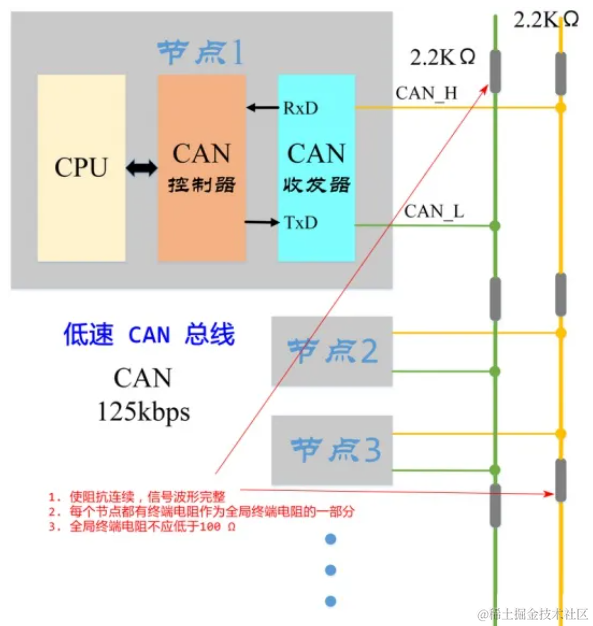
CAN总线是一种串行通信协议,通常用于连接嵌入式系统中的多个节点。它最初是为了满足汽车电子系统的需求而开发的,但现在广泛用于其他领域,如工业自动化和航空航天。CAN总线具有以下特点:
- 实时性:CAN总线支持实时通信,可以在不影响其他节点的情况下传输数据。这对于需要快速响应的嵌入式系统至关重要。
- 可靠性:CAN总线使用差分信号传输,可以抵抗电磁干扰,并在数据传输中检测错误。这使得它非常可靠,适用于恶劣环境。
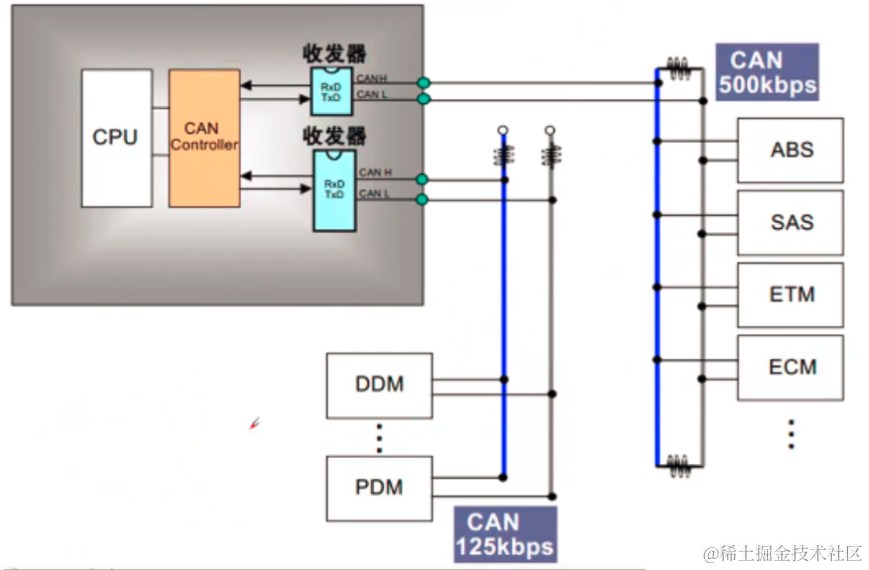
- 多节点通信:CAN总线允许多个节点并行通信,这对于需要节点之间相互交互的系统非常有用。
- 冲突解决:CAN总线使用非破坏性位冲突检测和回退算法来解决数据冲突,从而保证数据的一致性。
嵌入式系统中的CAN通信
现在,让我们通过一个简单的代码示例,演示如何在嵌入式系统中实现CAN通信。假设我们有两个嵌入式节点,它们需要互相通信。我们将使用C语言和一些常见的嵌入式开发工具,如Arduino和MCP2515 CAN控制器。
#include <SPI.h>
#include <mcp2515.h>
MCP2515 CAN;
void setup() {
Serial.begin(9600);
if(CAN.begin(CAN_100KBPS) == CAN_OK) {
Serial.println("CAN Bus Initialized Successfully!");
}
else {
Serial.println("Error Initializing CAN Bus...");
}
}
void loop() {
// 发送数据
CAN.openTXBuffer(TXB0, 0, false);
CAN.sendMsgBuf(0x100, 0, 8); // 发送一个8字节的数据包
// 接收数据
if(CAN.readMsgBuf(&len, buf) == CAN_OK) {
Serial.print("Received Data: ");
for(int i = 0; i < len; i++) {
Serial.print(buf[i], HEX);
Serial.print(" ");
}
Serial.println();
}
delay(1000);
}
在这个示例中,我们使用MCP2515库来控制CAN总线,Arduino用作嵌入式开发板。我们在setup()函数中初始化CAN总线,并在loop()函数中发送和接收数据。这个示例演示了如何在嵌入式系统中实现CAN通信,从而实现实时性和可靠性的平衡。
当涉及到嵌入式系统中的CAN通信时,还有许多不同的硬件平台和开发工具可供选择。以下是几个额外的代码案例,演示了在不同平台上如何实现CAN通信。
1. 使用STM32和HAL库进行CAN通信
这个示例演示了如何使用STMicroelectronics的STM32微控制器和STM32CubeMX HAL库进行CAN通信。它假设您已经配置了CubeMX项目以包含CAN总线。
#include "stm32f4xx_hal.h"
CAN_HandleTypeDef hcan1;
void SystemClock_Config(void);
int main(void) {
HAL_Init();
SystemClock_Config();
HAL_CAN_Init(&hcan1);
CAN_TxHeaderTypeDef TxHeader;
uint8_t TxData[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
TxHeader.StdId = 0x100;
TxHeader.RTR = CAN_RTR_DATA;
TxHeader.IDE = CAN_ID_STD;
TxHeader.DLC = 8;
if (HAL_CAN_AddTxMessage(&hcan1, &TxHeader, TxData, &TxMailbox) != HAL_OK) {
Error_Handler();
}
// 接收数据
CAN_RxHeaderTypeDef RxHeader;
uint8_t RxData[8];
if (HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &RxHeader, RxData) == HAL_OK) {
// 处理接收到的数据
}
while (1) {
// 主循环
}
}
2. 使用Raspberry Pi进行CAN通信
在树莓派上进行CAN通信通常需要使用CAN总线适配器。这是一个Python示例,演示了如何在树莓派上使用SocketCAN库进行CAN通信。
import can
# 初始化CAN总线
bus = can.interface.Bus(channel='can0', bustype='socketcan')
# 创建一个CAN消息
msg = can.Message(arbitration_id=0x100, data=[0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08])
# 发送消息
bus.send(msg)
# 接收消息
received_msg = bus.recv()
print("Received:", received_msg)
3. 使用Renesas RX微控制器进行CAN通信
这个示例使用Renesas RX微控制器和Renesas e²studio IDE,演示了如何配置和使用CAN通信。
#include <stdint.h>
#include <machine.h>
#include "iodefine.h"
void main(void) {
SYSTEM.PRCR.WORD = 0xA502; // Disable write protection
MSTP_CAN0 = 0; // Enable CAN0 module
CAN0.BIT.MCR = 0x001; // Release from HALT
CAN0.BIT.BCR = 0x000; // CAN Operation Mode
// 配置CAN消息对象
CAN0.MBX.CANID = 0x100;
CAN0.MBX.DLC = 8;
CAN0.MBX.IDE = 0;
CAN0.MBX.RTR = 0;
CAN0.MBX.TX = 1;
uint8_t data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
for (int i = 0; i < 8; i++) {
CAN0.MBX.MDATA[i] = data[i];
}
CAN0.MBX.TRMREQ = 1; // Request Transmission
while (1) {
// 主循环
}
}
以上示例展示了不同平台上的CAN通信实现,从基于STM32的嵌入式系统到树莓派和Renesas RX微控制器。无论您的硬件平台如何,CAN总线提供了实时性和可靠性的通信解决方案,适用于各种嵌入式应用。
当涉及到嵌入式系统和CAN通信时,还有其他示例,包括使用不同的嵌入式开发平台和编程语言的情况。
4. 使用ESP32和Arduino IDE进行CAN通信
这个示例演示了如何在ESP32上使用Arduino IDE和ESP32-CAN库进行CAN通信。
#include <Arduino.h>
#include <ESP32CAN.h>
CAN_device_t CAN_cfg;
void setup() {
Serial.begin(115200);
CAN_cfg.speed = CAN_SPEED_100KBPS;
CAN_cfg.tx_pin_id = GPIO_NUM_5;
CAN_cfg.rx_pin_id = GPIO_NUM_4;
if (can_init(&CAN_cfg) == ESP_OK) {
Serial.println("CAN Initialized Successfully!");
} else {
Serial.println("Error Initializing CAN...");
}
}
void loop() {
CAN_frame_t frame;
frame.FIR.B.FF = CAN_frame_std;
frame.MsgID = 0x100;
frame.FIR.B.DLC = 8;
frame.data.u8[0] = 0x01;
frame.data.u8[1] = 0x02;
frame.data.u8[2] = 0x03;
frame.data.u8[3] = 0x04;
frame.data.u8[4] = 0x05;
frame.data.u8[5] = 0x06;
frame.data.u8[6] = 0x07;
frame.data.u8[7] = 0x08;
can_send_frame(&frame);
delay(1000);
CAN_frame_t rx_frame;
if (can_receive_frame(&rx_frame, portMAX_DELAY)) {
Serial.print("Received Data: ");
for (int i = 0; i < rx_frame.FIR.B.DLC; i++) {
Serial.print(rx_frame.data.u8[i], HEX);
Serial.print(" ");
}
Serial.println();
}
}
5. 使用BeagleBone Black和SocketCAN进行CAN通信
在BeagleBone Black上进行CAN通信通常需要使用SocketCAN。这是一个示例,演示了如何在BeagleBone Black上使用SocketCAN库进行CAN通信。
# 启用CAN总线
sudo modprobe can
sudo modprobe can-dev
sudo modprobe can-raw
# 创建CAN接口
sudo ip link set can0 type can bitrate 500000
sudo ifconfig can0 up
# 发送CAN消息
cansend can0 100#0102030405060708
# 接收CAN消息
candump can0
6. 使用Microchip PIC32和MPLAB X进行CAN通信
这个示例演示了如何在Microchip PIC32微控制器上使用MPLAB X和Microchip Harmony框架进行CAN通信。
#include "definitions.h"
int main(void) {
SYSTEM_Initialize();
CAN_MESSAGE message;
uint8_t data[8] = {0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08};
while (1) {
message.id = 0x100;
message.data = data;
message.dataLength = 8;
message.msgAttr = MSG_TX_DATA_FRAME;
CAN1_MessageTransmit(&message);
while (CAN1_IsTxMessagePending() == true) {
// 等待消息发送完成
}
// 接收CAN消息
CAN1_MessageReceive(&message);
}
}
这些示例展示了在不同嵌入式开发平台上使用不同编程语言实现CAN通信的方法。无论您使用哪种平台和工具,CAN总线提供了强大的通信功能,可以满足嵌入式系统中实时性和可靠性的需求。
总结一下,CAN总线是一种在嵌入式系统中实现实时性和可靠性通信的重要工具。下面是关于CAN总线和嵌入式系统通信的要点:
- CAN总线基础:CAN总线是一种串行通信协议,用于在多个嵌入式节点之间进行高效通信。它提供了实时性和可靠性的平衡,适用于各种应用领域,包括汽车电子、工业自动化和航空航天。
- 实时性:CAN总线支持实时通信,允许节点在不干扰其他节点的情况下传输数据。这对需要快速响应的嵌入式系统至关重要。
- 可靠性:CAN总线使用差分信号传输,可以抵抗电磁干扰,并具有错误检测和冲突解决机制,使其非常可靠。
- 多节点通信:CAN总线允许多个节点并行通信,这对于需要节点之间相互交互的系统非常有用。
- 代码示例:本文提供了多个示例,演示了如何在不同硬件平台和开发工具中实现CAN通信。这些示例包括使用Arduino、树莓派、STM32、ESP32、BeagleBone Black、Microchip PIC32等平台。
总之,CAN总线是一种强大的通信协议,用于实现嵌入式系统中的实时性和可靠性通信。通过合适的硬件和软件配置,嵌入式开发人员可以利用CAN总线来构建各种复杂的系统,满足实时性和可靠性的需求。这对于汽车、工业自动化、航空航天等领域的应用都非常重要。
结论
CAN总线是嵌入式系统中实现实时性和可靠性平衡的强大工具。通过提供多节点通信、实时性、可靠性和冲突解决机制,CAN总线已广泛用于各种应用领域。本文中的示例代码只是一个入门级的示例,嵌入式系统中的CAN通信可以更复杂,具体取决于应用需求。无论如何,CAN总线仍然是一种重要的通信协议,用于确保嵌入式系统的高效通信。

- 点赞
- 收藏
- 关注作者
评论(0)