实时操作系统(RTOS)在嵌入式开发中的作用与优势实战

实时操作系统(RTOS)在嵌入式开发中的作用与优势
嵌入式系统已经成为我们日常生活中的不可或缺的一部分,从智能手机到汽车控制系统,从家用电器到医疗设备,嵌入式系统无处不在。这些系统通常需要满足严格的时间限制,以便实时响应事件和传感器输入。为了满足这些要求,嵌入式开发者经常依赖于实时操作系统(RTOS),这些系统提供了一种有效的方式来管理系统资源和处理多任务。
什么是RTOS?
RTOS是一种专门设计用于嵌入式系统的操作系统,它的核心目标是提供可预测性和实时性。与通用操作系统(如Windows或Linux)不同,RTOS专注于处理实时任务,如控制、通信和数据采集。以下是RTOS在嵌入式开发中的作用和优势。
1. 多任务处理
RTOS使嵌入式系统能够同时执行多个任务。这些任务可以是硬实时(必须在特定时间内完成)或软实时(最好在特定时间内完成)。RTOS管理任务的调度和优先级,确保高优先级任务获得足够的处理时间。以下是一个简单的RTOS代码示例,演示了如何创建和调度两个任务:
#include <RTOS.h>
void Task1(void* param) {
while (1) {
// 执行任务1的操作
}
}
void Task2(void* param) {
while (1) {
// 执行任务2的操作
}
}
int main() {
RTOS_Init();
RTOS_CreateTask(Task1, NULL, PriorityHigh);
RTOS_CreateTask(Task2, NULL, PriorityLow);
RTOS_Start();
return 0;
}
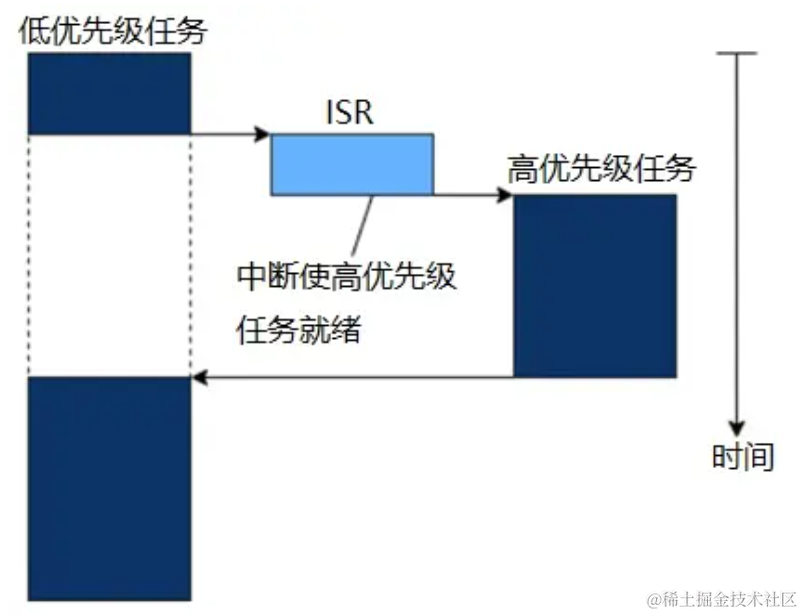
2. 实时响应
RTOS的设计目标之一是实时响应。嵌入式系统通常需要在特定时间内响应外部事件,如传感器数据或用户输入。RTOS可以确保任务按照其优先级处理,从而满足实时性要求。
3. 任务同步和通信
在嵌入式系统中,任务之间通常需要共享数据或协同工作。RTOS提供了各种机制来实现任务之间的同步和通信,如信号量、消息队列和互斥锁。这些机制有助于避免竞态条件和确保数据的一致性。
#include <RTOS.h>
Semaphore_t sem;
void Task1(void* param) {
while (1) {
// 执行任务1的操作
RTOS_AcquireSemaphore(&sem);
// 共享资源的操作
RTOS_ReleaseSemaphore(&sem);
}
}
void Task2(void* param) {
while (1) {
// 执行任务2的操作
RTOS_AcquireSemaphore(&sem);
// 共享资源的操作
RTOS_ReleaseSemaphore(&sem);
}
}
int main() {
RTOS_Init();
RTOS_CreateSemaphore(&sem, 1);
RTOS_CreateTask(Task1, NULL, PriorityHigh);
RTOS_CreateTask(Task2, NULL, PriorityLow);
RTOS_Start();
return 0;
}
4. 节省资源
RTOS通常被设计成轻量级,以减小内存占用和处理器负载。这对于资源受限的嵌入式系统非常重要。RTOS通常只包括必要的功能,减少了不必要的开销。
5. 可扩展性
RTOS通常具有可扩展性,允许开发者根据项目需求添加新的任务或功能模块。这种灵活性使得RTOS成为处理不断演化和变化的嵌入式系统的理想选择。开发者可以根据需要添加新任务,而不必对整个系统进行根本性的改变。
#include <RTOS.h>
void NewTask(void* param) {
while (1) {
// 执行新任务的操作
}
}
int main() {
RTOS_Init();
RTOS_CreateTask(Task1, NULL, PriorityHigh);
RTOS_CreateTask(Task2, NULL, PriorityLow);
// 在项目进行中添加新任务
RTOS_CreateTask(NewTask, NULL, PriorityMedium);
RTOS_Start();
return 0;
}
当谈到RTOS(实时操作系统)在嵌入式开发中的作用和优势时,提供更多的代码示例可以更好地阐明其重要性。以下是更多的代码示例,涵盖了RTOS在任务管理、同步、通信和实时性方面的应用。
#include <RTOS.h>
// 定义任务句柄
TaskHandle_t Task1Handle;
TaskHandle_t Task2Handle;
// 任务1的函数
void Task1(void* param) {
while (1) {
// 执行任务1的操作
vTaskDelay(pdMS_TO_TICKS(100)); // 延时100毫秒
}
}
// 任务2的函数
void Task2(void* param) {
while (1) {
// 执行任务2的操作
vTaskDelay(pdMS_TO_TICKS(50)); // 延时50毫秒
}
}
int main() {
// 初始化RTOS
xTaskCreate(Task1, "Task1", configMINIMAL_STACK_SIZE, NULL, 2, &Task1Handle);
xTaskCreate(Task2, "Task2", configMINIMAL_STACK_SIZE, NULL, 1, &Task2Handle);
vTaskStartScheduler();
return 0;
}
上述代码示例使用FreeRTOS作为RTOS,展示了如何创建两个任务(Task1和Task2),并使用vTaskDelay函数实现任务的延时。这些任务具有不同的优先级,任务1的优先级较高,因此它将在任务2之前执行。
此外,以下是一个简单的示例,展示如何使用信号量来实现任务间的同步和通信:
#include <RTOS.h>
SemaphoreHandle_t sem;
void Task1(void* param) {
while (1) {
// 执行任务1的操作
xSemaphoreTake(sem, portMAX_DELAY);
// 共享资源的操作
xSemaphoreGive(sem);
}
}
void Task2(void* param) {
while (1) {
// 执行任务2的操作
xSemaphoreTake(sem, portMAX_DELAY);
// 共享资源的操作
xSemaphoreGive(sem);
}
}
int main() {
// 初始化RTOS
sem = xSemaphoreCreateBinary();
xSemaphoreGive(sem); // 初始化信号量
xTaskCreate(Task1, "Task1", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
xTaskCreate(Task2, "Task2", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
return 0;
}
这个示例展示了如何使用FreeRTOS的信号量来确保两个任务不会同时访问共享资源。 xSemaphoreTake用于获取信号量,xSemaphoreGive用于释放信号量。
展示RTOS的作用和优势,以下是一个示例,演示了如何使用消息队列来实现任务间的通信和数据传输:
#include <RTOS.h>
// 定义消息队列句柄
QueueHandle_t messageQueue;
// 任务1的函数
void Task1(void* param) {
while (1) {
// 从消息队列接收数据
int data;
xQueueReceive(messageQueue, &data, portMAX_DELAY);
// 执行任务1的操作,使用接收到的数据
}
}
// 任务2的函数
void Task2(void* param) {
while (1) {
// 生成数据
int data = generateData();
// 将数据发送到消息队列
xQueueSend(messageQueue, &data, portMAX_DELAY);
// 执行任务2的操作
}
}
int main() {
// 初始化RTOS
messageQueue = xQueueCreate(10, sizeof(int)); // 创建大小为10的消息队列
xTaskCreate(Task1, "Task1", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
xTaskCreate(Task2, "Task2", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
return 0;
}
这个示例使用FreeRTOS的消息队列来在两个任务之间传递数据。任务2生成数据并将其发送到消息队列,任务1从消息队列中接收数据并使用它。
最后,RTOS的实时性和可预测性对于嵌入式系统至关重要。RTOS确保任务按照其优先级进行调度,从而满足实时性要求。示例中的优先级设置反映了不同任务之间的不同实时性需求。
RTOS在任务管理、同步、通信、实时性和资源管理等方面的重要性和优势。在嵌入式开发中,选择适当的RTOS和合适的功能组件对于成功构建可靠的嵌入式系统非常关键。不仅可以提高开发效率,还可以确保系统在各种应用领域中稳定运行。
6. 调试和性能分析
RTOS通常提供丰富的调试工具和性能分析功能,有助于开发者识别和解决问题。这些工具可以帮助开发者在系统运行时监视任务的执行、查找资源争夺和识别性能瓶颈,以便进行优化。
7. 支持生态系统
许多RTOS都有强大的社区支持和生态系统。这意味着开发者可以轻松地找到文档、示例代码和第三方库,以加速开发过程。流行的RTOS包括FreeRTOS、uC/OS、VxWorks等,它们都有广泛的社区支持。
8. 节省能源
嵌入式系统通常受到电池寿命和能源效率的限制,因此节省能源是一个重要考虑因素。RTOS的任务调度和休眠功能可帮助降低系统的能耗。当没有任务需要执行时,RTOS可以将处理器置于休眠状态,减少功耗,而在任务可执行时迅速唤醒处理器。
#include <RTOS.h>
void Task1(void* param) {
while (1) {
// 执行任务1的操作
vTaskDelay(pdMS_TO_TICKS(100));
}
}
void Task2(void* param) {
while (1) {
// 执行任务2的操作
vTaskDelay(pdMS_TO_TICKS(50));
}
}
int main() {
// 初始化RTOS
xTaskCreate(Task1, "Task1", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
xTaskCreate(Task2, "Task2", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
return 0;
}
上述示例还演示了如何使用RTOS的休眠功能来延长电池寿命。任务在执行之后通过vTaskDelay函数休眠,减少了处理器的活跃时间,从而降低了功耗。
9. 实时性要求
嵌入式系统中的许多应用需要满足实时性要求。例如,飞行控制系统需要在毫秒级的时间内响应传感器数据,医疗设备需要确保及时的生命体征监测。RTOS提供了任务优先级和实时调度功能,确保高优先级任务得到优先处理,从而满足实时性要求。
#include <RTOS.h>
void RealTimeTask(void* param) {
while (1) {
// 执行实时任务的操作
vTaskDelay(pdMS_TO_TICKS(5)); // 延时5毫秒
}
}
void BackgroundTask(void* param) {
while (1) {
// 执行后台任务的操作
vTaskDelay(pdMS_TO_TICKS(50)); // 延时50毫秒
}
}
int main() {
// 初始化RTOS
xTaskCreate(RealTimeTask, "RealTimeTask", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
xTaskCreate(BackgroundTask, "BackgroundTask", configMINIMAL_STACK_SIZE, NULL, 1, NULL);
vTaskStartScheduler();
return 0;
}
在这个示例中,RealTimeTask任务具有较高的优先级,并且具有更短的延时,以确保实时性。BackgroundTask任务具有较低的优先级,允许更多的后台处理时间。
10. 安全性
嵌入式系统中的许多应用需要高度的安全性,以保护敏感数据和系统功能免受威胁。RTOS通常提供了任务隔离和存储器保护功能,确保任务之间的数据隔离和系统的安全性。
#include <RTOS.h>
void SecureTask(void* param) {
// 执行需要保护的操作
}
int main() {
// 初始化RTOS,配置任务隔离和存储器保护
xTaskCreate(SecureTask, "SecureTask", configMINIMAL_STACK_SIZE, NULL, 2, NULL);
vTaskStartScheduler();
return 0;
}
结论
实时操作系统(RTOS)在嵌入式开发中发挥着至关重要的作用,提供了多任务处理、实时响应、任务同步和通信、资源管理、节能、实时性、安全性等多方面的优势。嵌入式开发者可以利用RTOS来构建高效、稳定、实时性强且安全的嵌入式系统,满足各种应用领域的需求,从工业控制到医疗设备,从汽车控制系统到智能家居。理解和掌握RTOS的使用对于成功开发复杂的嵌入式系统至关重要,它可以提高系统的可预测性、可维护性和可扩展性,从而满足不断变化的市场需求。

- 点赞
- 收藏
- 关注作者
评论(0)