【AI实战营第二期】第三次作业——基于 RTMDet 的气球检测(包含数据集)

【摘要】 作业:基于 RTMDet 的气球检测背景:熟悉目标检测和 MMDetection 常用自定义流程。任务:基于提供的 notebook,将 cat 数据集换成气球数据集;按照视频中 notebook 步骤,可视化数据集和标签;使用MMDetection算法库,训练 RTMDet 气球目标检测算法,可以适当调参,提交测试集评估指标;用网上下载的任意包括气球的图片进行预测,将预测结果发到群里;按...
作业:基于 RTMDet 的气球检测
背景:熟悉目标检测和 MMDetection 常用自定义流程。
任务:
基于提供的 notebook,将 cat 数据集换成气球数据集;
按照视频中 notebook 步骤,可视化数据集和标签;
使用MMDetection算法库,训练 RTMDet 气球目标检测算法,可以适当调参,提交测试集评估指标;
用网上下载的任意包括气球的图片进行预测,将预测结果发到群里;
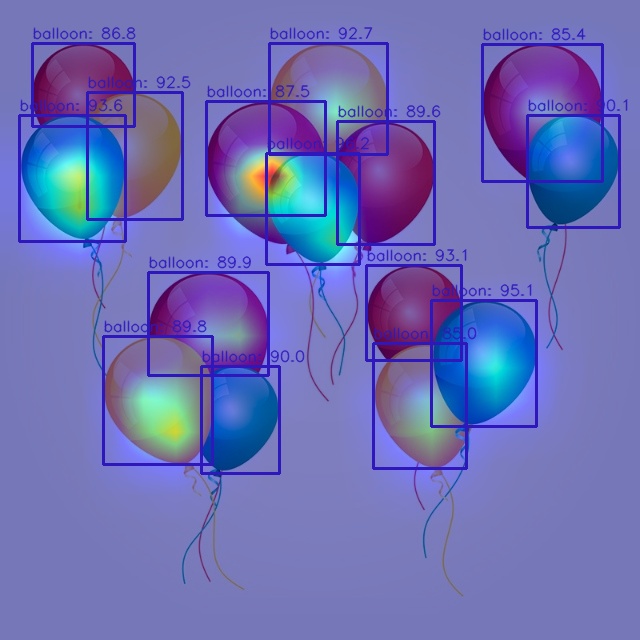
按照视频中 notebook 步骤,对 demo 图片进行特征图可视化和 Box AM 可视化,将结果发到群里
需提交的测试集评估指标(不能低于baseline指标的50%)
目标检测 RTMDet-tiny 模型性能 不低于65 mAP。
数据集
气球数据集可以直接下载https://download.openmmlab.com/mmyolo/data/balloon_dataset.zip
P.S. 同时也欢迎各位选择更复杂的数据集进行训练,如选用同济子豪兄的十类饮料目标检测数据集Drink_28
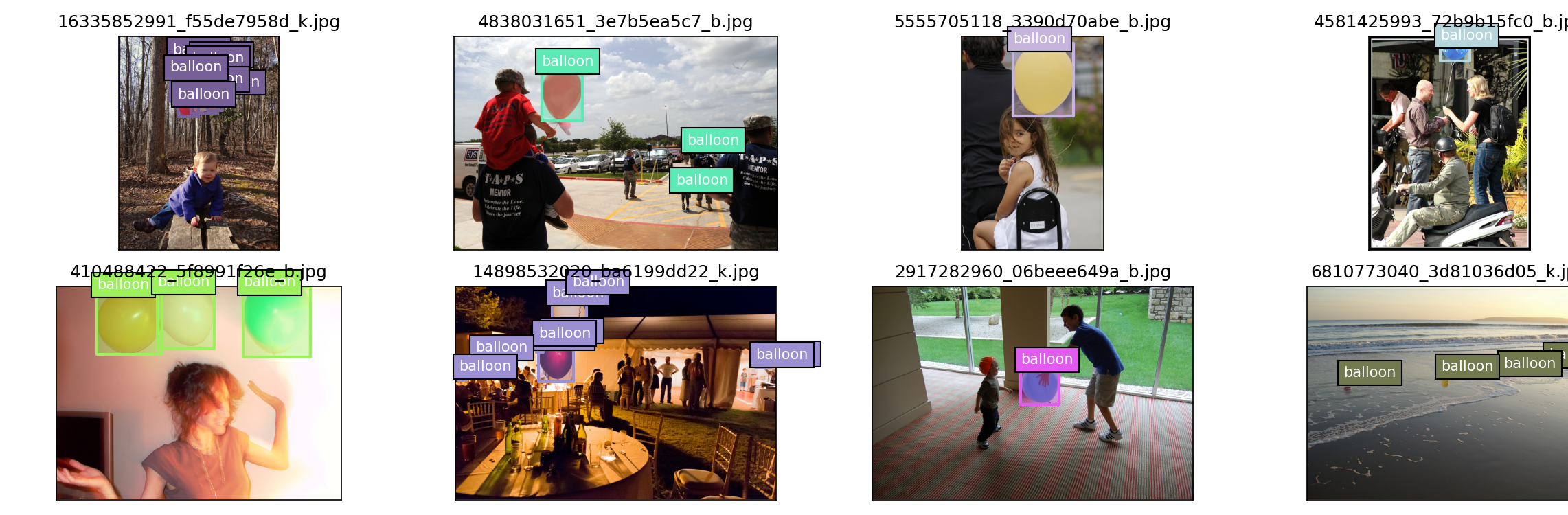
展示图片
使用pyplot展示训练集的图片,代码如下:
# 数据集可视化
import os
import matplotlib.pyplot as plt
from PIL import Image
original_images = []
images = []
texts = []
plt.figure(figsize=(16, 5))
image_paths = [filename for filename in os.listdir('balloon/train')][:8]
for i, filename in enumerate(image_paths):
name = os.path.splitext(filename)[0]
image = Image.open('balloon/train/' + filename).convert("RGB")
plt.subplot(2, 4, i + 1)
plt.imshow(image)
plt.title(f"{filename}")
plt.xticks([])
plt.yticks([])
plt.tight_layout()
plt.show()

由于数据集不是标椎的COCO数据集,所以先将格式转为COCO
import os.path as osp
import mmcv
from mmengine.fileio import dump, load
from mmengine.utils import track_iter_progress
def convert_balloon_to_coco(ann_file, out_file, image_prefix):
data_infos = load(ann_file)
annotations = []
images = []
obj_count = 0
for idx, v in enumerate(track_iter_progress(data_infos.values())):
filename = v['filename']
img_path = osp.join(image_prefix, filename)
height, width = mmcv.imread(img_path).shape[:2]
images.append(
dict(id=idx, file_name=filename, height=height, width=width))
for _, obj in v['regions'].items():
assert not obj['region_attributes']
obj = obj['shape_attributes']
px = obj['all_points_x']
py = obj['all_points_y']
poly = [(x + 0.5, y + 0.5) for x, y in zip(px, py)]
poly = [p for x in poly for p in x]
x_min, y_min, x_max, y_max = (min(px), min(py), max(px), max(py))
data_anno = dict(
image_id=idx,
id=obj_count,
category_id=0,
bbox=[x_min, y_min, x_max - x_min, y_max - y_min],
area=(x_max - x_min) * (y_max - y_min),
segmentation=[poly],
iscrowd=0)
annotations.append(data_anno)
obj_count += 1
coco_format_json = dict(
images=images,
annotations=annotations,
categories=[{
'id': 0,
'name': 'balloon'
}])
dump(coco_format_json, out_file)
if __name__ == '__main__':
convert_balloon_to_coco(ann_file='balloon/train/via_region_data.json',
out_file='balloon/train/annotation_coco.json',
image_prefix='balloon/train')
convert_balloon_to_coco(ann_file='balloon/val/via_region_data.json',
out_file='balloon/val/annotation_coco.json',
image_prefix='balloon/val')
然后,展示COCO格式的数据集,代码如下:
from pycocotools.coco import COCO
import numpy as np
import os.path as osp
from matplotlib.collections import PatchCollection
from matplotlib.patches import Polygon
import matplotlib.pyplot as plt
from PIL import Image
def apply_exif_orientation(image):
_EXIF_ORIENT = 274
if not hasattr(image, 'getexif'):
return image
try:
exif = image.getexif()
except Exception:
exif = None
if exif is None:
return image
orientation = exif.get(_EXIF_ORIENT)
method = {
2: Image.FLIP_LEFT_RIGHT,
3: Image.ROTATE_180,
4: Image.FLIP_TOP_BOTTOM,
5: Image.TRANSPOSE,
6: Image.ROTATE_270,
7: Image.TRANSVERSE,
8: Image.ROTATE_90,
}.get(orientation)
if method is not None:
return image.transpose(method)
return image
def show_bbox_only(coco, anns, show_label_bbox=True, is_filling=True):
"""Show bounding box of annotations Only."""
if len(anns) == 0:
return
ax = plt.gca()
ax.set_autoscale_on(False)
image2color = dict()
for cat in coco.getCatIds():
image2color[cat] = (np.random.random((1, 3)) * 0.7 + 0.3).tolist()[0]
polygons = []
colors = []
for ann in anns:
color = image2color[ann['category_id']]
bbox_x, bbox_y, bbox_w, bbox_h = ann['bbox']
poly = [[bbox_x, bbox_y], [bbox_x, bbox_y + bbox_h],
[bbox_x + bbox_w, bbox_y + bbox_h], [bbox_x + bbox_w, bbox_y]]
polygons.append(Polygon(np.array(poly).reshape((4, 2))))
colors.append(color)
if show_label_bbox:
label_bbox = dict(facecolor=color)
else:
label_bbox = None
ax.text(
bbox_x,
bbox_y,
'%s' % (coco.loadCats(ann['category_id'])[0]['name']),
color='white',
bbox=label_bbox)
if is_filling:
p = PatchCollection(
polygons, facecolor=colors, linewidths=0, alpha=0.4)
ax.add_collection(p)
p = PatchCollection(
polygons, facecolor='none', edgecolors=colors, linewidths=2)
ax.add_collection(p)
coco = COCO('balloon/val/annotation_coco.json')
image_ids = coco.getImgIds()
print(image_ids)
np.random.shuffle(image_ids)
plt.figure(figsize=(16, 5))
# 只可视化 8 张图片
for i in range(8):
image_data = coco.loadImgs(image_ids[i])[0]
image_path = osp.join('balloon/val/', image_data['file_name'])
annotation_ids = coco.getAnnIds(
imgIds=image_data['id'], catIds=[], iscrowd=0)
annotations = coco.loadAnns(annotation_ids)
ax = plt.subplot(2, 4, i + 1)
image = Image.open(image_path).convert("RGB")
# 这行代码很关键,否则可能图片和标签对不上
image = apply_exif_orientation(image)
ax.imshow(image)
show_bbox_only(coco, annotations)
plt.title(f"{image_data['file_name']}")
plt.xticks([])
plt.yticks([])
plt.tight_layout()
plt.show()
配置文件
编写在根目录,新建rtmdet_tiny_1xb12-40e_cat.py,插入代码:
_base_ = 'configs/rtmdet/rtmdet_tiny_8xb32-300e_coco.py'
data_root = '.'
# 非常重要
metainfo = {
# 类别名,注意 classes 需要是一个 tuple,因此即使是单类,
# 你应该写成 `cat,` 很多初学者经常会在这犯错
'classes': ('balloon',),
'palette': [
(220, 20, 60),
]
}
num_classes = 1
# 训练 40 epoch
max_epochs = 40
# 训练单卡 bs= 12
train_batch_size_per_gpu = 12
# 可以根据自己的电脑修改
train_num_workers = 4
# 验证集 batch size 为 1
val_batch_size_per_gpu = 1
val_num_workers = 2
# RTMDet 训练过程分成 2 个 stage,第二个 stage 会切换数据增强 pipeline
num_epochs_stage2 = 5
# batch 改变了,学习率也要跟着改变, 0.004 是 8卡x32 的学习率
base_lr = 12 * 0.004 / (32*8)
# 采用 COCO 预训练权重
load_from = 'https://download.openmmlab.com/mmdetection/v3.0/rtmdet/rtmdet_tiny_8xb32-300e_coco/rtmdet_tiny_8xb32-300e_coco_20220902_112414-78e30dcc.pth' # noqa
model = dict(
# 考虑到数据集太小,且训练时间很短,我们把 backbone 完全固定
# 用户自己的数据集可能需要解冻 backbone
backbone=dict(frozen_stages=4),
# 不要忘记修改 num_classes
bbox_head=dict(dict(num_classes=num_classes)))
# 数据集不同,dataset 输入参数也不一样
train_dataloader = dict(
batch_size=train_batch_size_per_gpu,
num_workers=train_num_workers,
pin_memory=False,
dataset=dict(
data_root=data_root,
metainfo=metainfo,
ann_file='balloon/train/annotation_coco.json',
data_prefix=dict(img='balloon/train')))
val_dataloader = dict(
batch_size=val_batch_size_per_gpu,
num_workers=val_num_workers,
dataset=dict(
metainfo=metainfo,
data_root=data_root,
ann_file='balloon/train/annotation_coco.json',
data_prefix=dict(img='balloon/val/')))
test_dataloader = val_dataloader
# 默认的学习率调度器是 warmup 1000,但是 cat 数据集太小了,需要修改 为 30 iter
param_scheduler = [
dict(
type='LinearLR',
start_factor=1.0e-5,
by_epoch=False,
begin=0,
end=30),
dict(
type='CosineAnnealingLR',
eta_min=base_lr * 0.05,
begin=max_epochs // 2, # max_epoch 也改变了
end=max_epochs,
T_max=max_epochs // 2,
by_epoch=True,
convert_to_iter_based=True),
]
optim_wrapper = dict(optimizer=dict(lr=base_lr))
# 第二 stage 切换 pipeline 的 epoch 时刻也改变了
_base_.custom_hooks[1].switch_epoch = max_epochs - num_epochs_stage2
val_evaluator = dict(ann_file=data_root + 'annotations/test.json')
test_evaluator = val_evaluator
# 一些打印设置修改
default_hooks = dict(
checkpoint=dict(interval=10, max_keep_ckpts=2, save_best='auto'), # 同时保存最好性能权重
logger=dict(type='LoggerHook', interval=5))
train_cfg = dict(max_epochs=max_epochs, val_interval=10)
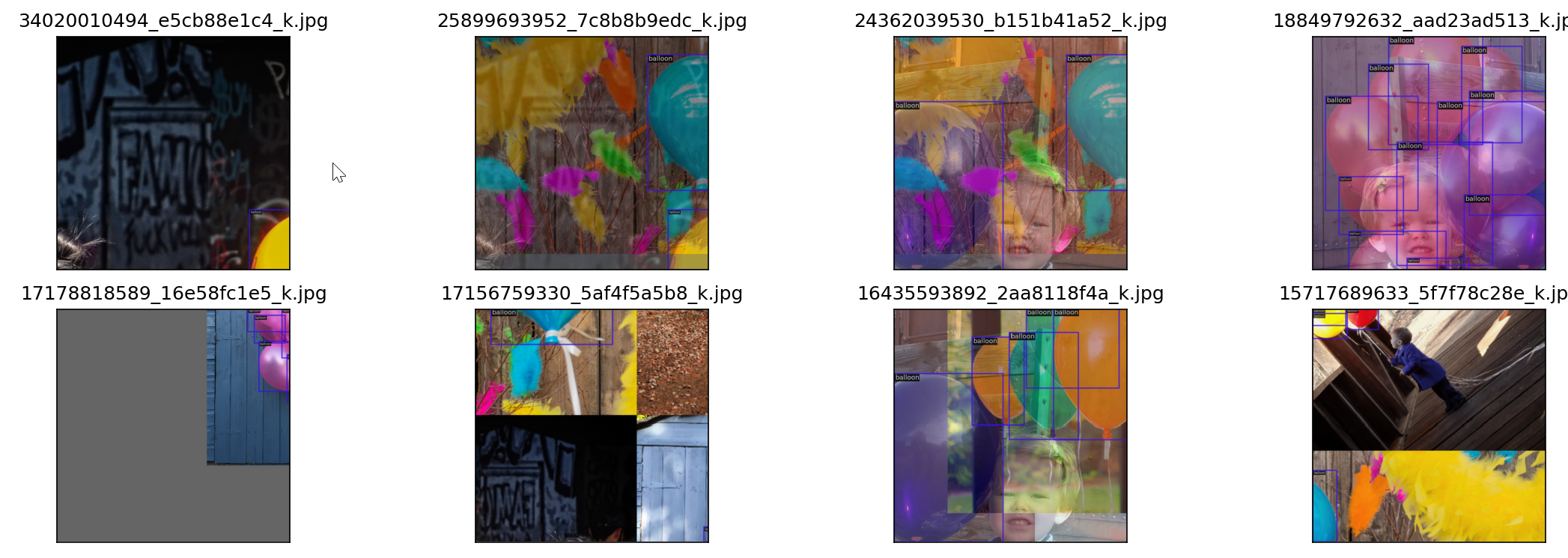
训练
训练前的可视化验证。代码如下:
from mmdet.registry import DATASETS, VISUALIZERS
from mmengine.config import Config
from mmengine.registry import init_default_scope
import matplotlib.pyplot as plt
import os.path as osp
cfg = Config.fromfile('rtmdet_tiny_1xb12-40e_cat.py')
init_default_scope(cfg.get('default_scope', 'mmdet'))
dataset = DATASETS.build(cfg.train_dataloader.dataset)
visualizer = VISUALIZERS.build(cfg.visualizer)
visualizer.dataset_meta = dataset.metainfo
plt.figure(figsize=(16, 5))
# 只可视化前 8 张图片
for i in range(8):
item=dataset[i]
img = item['inputs'].permute(1, 2, 0).numpy()
data_sample = item['data_samples'].numpy()
gt_instances = data_sample.gt_instances
img_path = osp.basename(item['data_samples'].img_path)
gt_bboxes = gt_instances.get('bboxes', None)
gt_instances.bboxes = gt_bboxes.tensor
data_sample.gt_instances = gt_instances
visualizer.add_datasample(
osp.basename(img_path),
img,
data_sample,
draw_pred=False,
show=False)
drawed_image=visualizer.get_image()
plt.subplot(2, 4, i+1)
plt.imshow(drawed_image[..., [2, 1, 0]])
plt.title(f"{osp.basename(img_path)}")
plt.xticks([])
plt.yticks([])
plt.tight_layout()
plt.show()
运行:
python tools/train.py rtmdet_tiny_1xb12-40e_cat.py
结果:
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.741
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.846
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.823
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.000
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.496
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.854
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.228
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.784
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.818
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.000
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.733
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.892
06/10 05:35:01 - mmengine - INFO - bbox_mAP_copypaste: 0.741 0.846 0.823 0.000 0.496 0.854
06/10 05:35:01 - mmengine - INFO - Epoch(val) [100][13/13] coco/bbox_mAP: 0.7410 coco/bbox_mAP_50: 0.8460 coco/bbox_mAP_75: 0.8230 coco/bbox_mAP_s: 0.0000 coco/bbox_mAP_m: 0.4960 coco/bbox_mAP_l: 0.8540 data_time: 0.0033 time: 0.0201
测试
推理代码:
python tools/test.py rtmdet_tiny_1xb12-40e_cat.py work_dirs/rtmdet_tiny_1xb12-40e_cat/best_coco/bbox_mAP_epoch_90.pth
测试结果:
DONE (t=0.01s).
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.745
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.837
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.815
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.000
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.472
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.870
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.230
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.782
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.822
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.000
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.692
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = 0.911
06/10 14:19:04 - mmengine - INFO - bbox_mAP_copypaste: 0.745 0.837 0.815 0.000 0.472 0.870
06/10 14:19:04 - mmengine - INFO - Epoch(test) [13/13] coco/bbox_mAP: 0.7450 coco/bbox_mAP_50: 0.8370 coco/bbox_mAP_75: 0.8150 coco/bbox_mAP_s: 0.0000 coco/bbox_mAP_m: 0.4720 coco/bbox_mAP_l: 0.8700 data_time: 0.5673 time: 1.1063
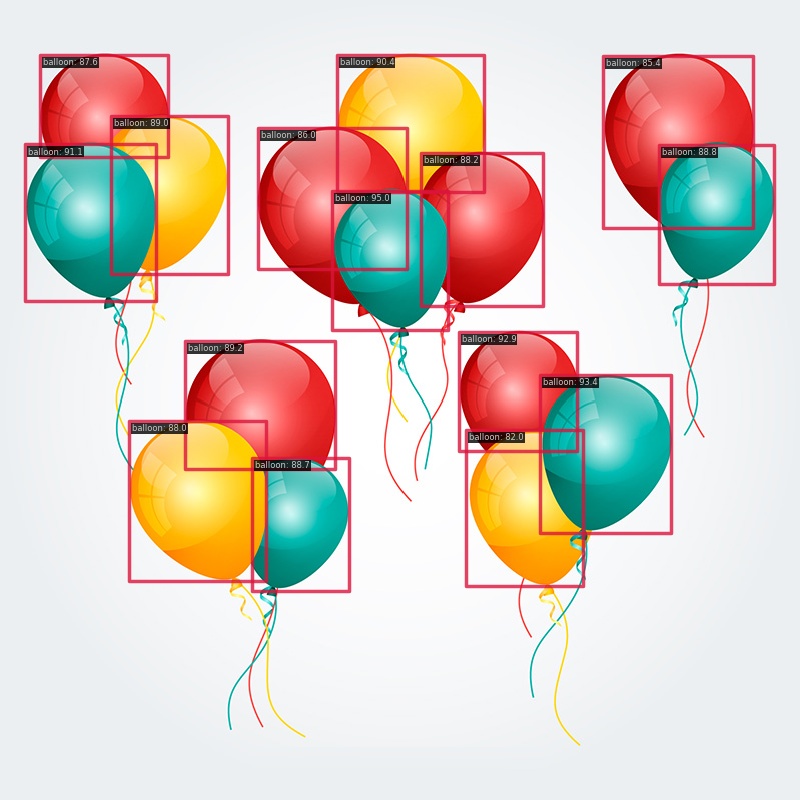
测试单张图片

python demo/image_demo.py 975.jpg rtmdet_tiny_1xb12-40e_cat.py --weights work_dirs/rtmdet_tiny_1xb12-40e_cat/best_coco/bbox_mAP_epoch_90.pth
测试结果:
特征图可视化
安装mmyolo,执行命令:
git clone -b tutorials https://github.com/open-mmlab/mmyolo.git
cd mmyolo
pip install -e .
首先,resize图片,代码如下:
import cv2
img = cv2.imread('../mmdetection-tutorials/975.jpg')
h,w=img.shape[:2]
resized_img = cv2.resize(img, (640, 640))
cv2.imwrite('resized_image.jpg', resized_img)
然后再mmyolo的命令行中执行可视化,命令如下:
python demo/featmap_vis_demo.py resized_image.jpg ../mmdetection-tutorials/rtmdet_tiny_1xb12-40e_cat.py ../mmdetection-tutorials/work_dirs/rtmdet_tiny_1xb12-40e_cat/best_coco/bbox_mAP_epoch_90.pth --target-layers backbone --channel-reduction squeeze_mean
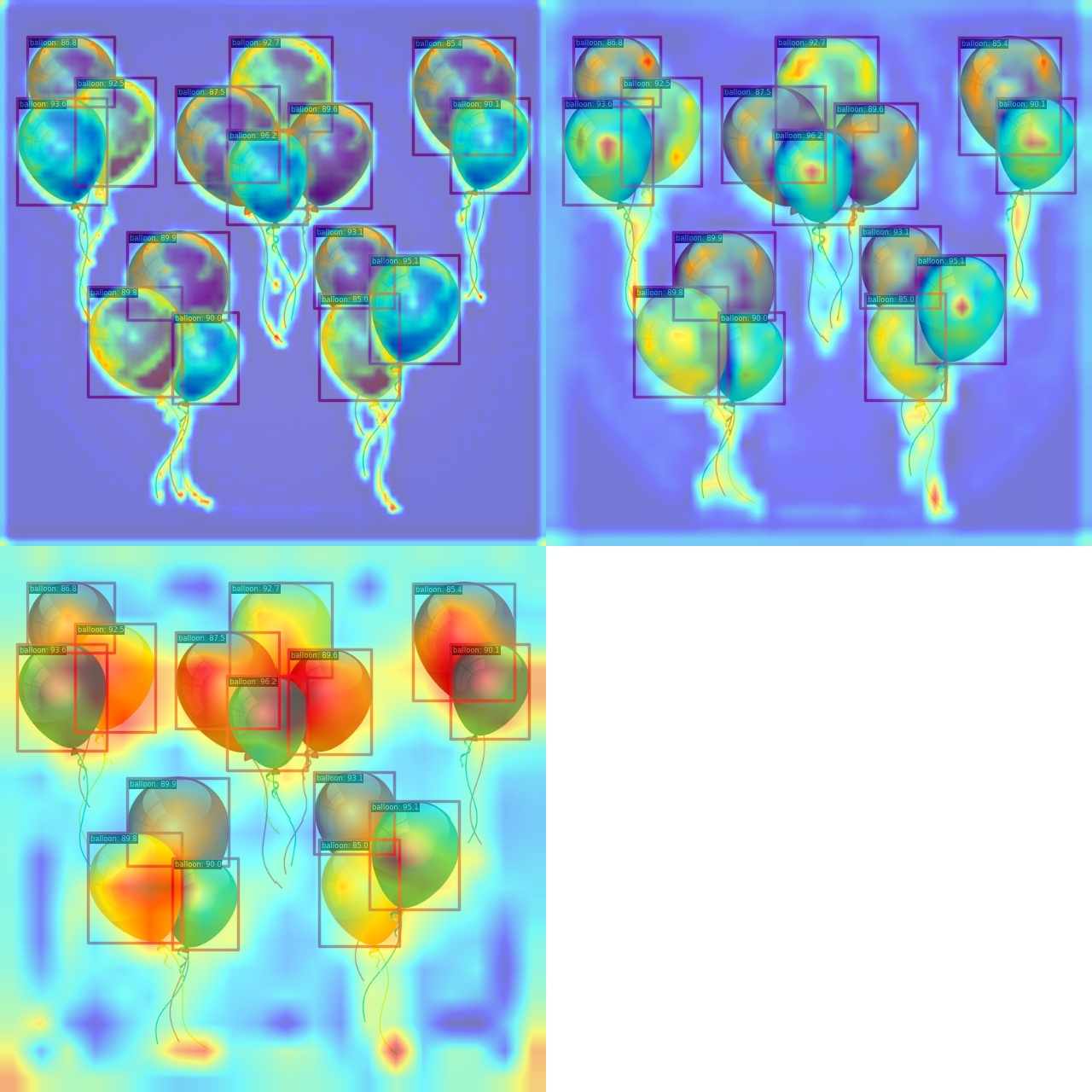
Grad-Based CAM 可视化
先安装Grad-Based CAM库,执行命令:
pip install grad-cam
然后再mmyolo,执行命令:
python demo/boxam_vis_demo.py resized_image.jpg ../mmdetection-tutorials/rtmdet_tiny_1xb12-40e_cat.py ../mmdetection-tutorials/work_dirs/rtmdet_tiny_1xb12-40e_cat/best_coco/bbox_mAP_epoch_90.pth --target-layers neck.out_convs[2]

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)