STM32智能小车第二章 PWM调速

【摘要】 @TOC 前言 一、PMW调速电机原理当没有进行配置PWM时默认PWM输出100%,所以此时小车的速度达到最大,调节PWM的占空比可以让小车的速度改变。 二、cubeMX配置上篇文章讲到了PB0和PB1是控制左右电机转速的,所以我们只需要在之前的基础上将PB0和PB1设置为PWM模式即可。 三、代码解析在原来的Moto.c和Moto.h里面添加下面代码即可Moto.cextern TIM_H...
@TOC
前言
一、PMW调速电机原理
当没有进行配置PWM时默认PWM输出100%,所以此时小车的速度达到最大,调节PWM的占空比可以让小车的速度改变。
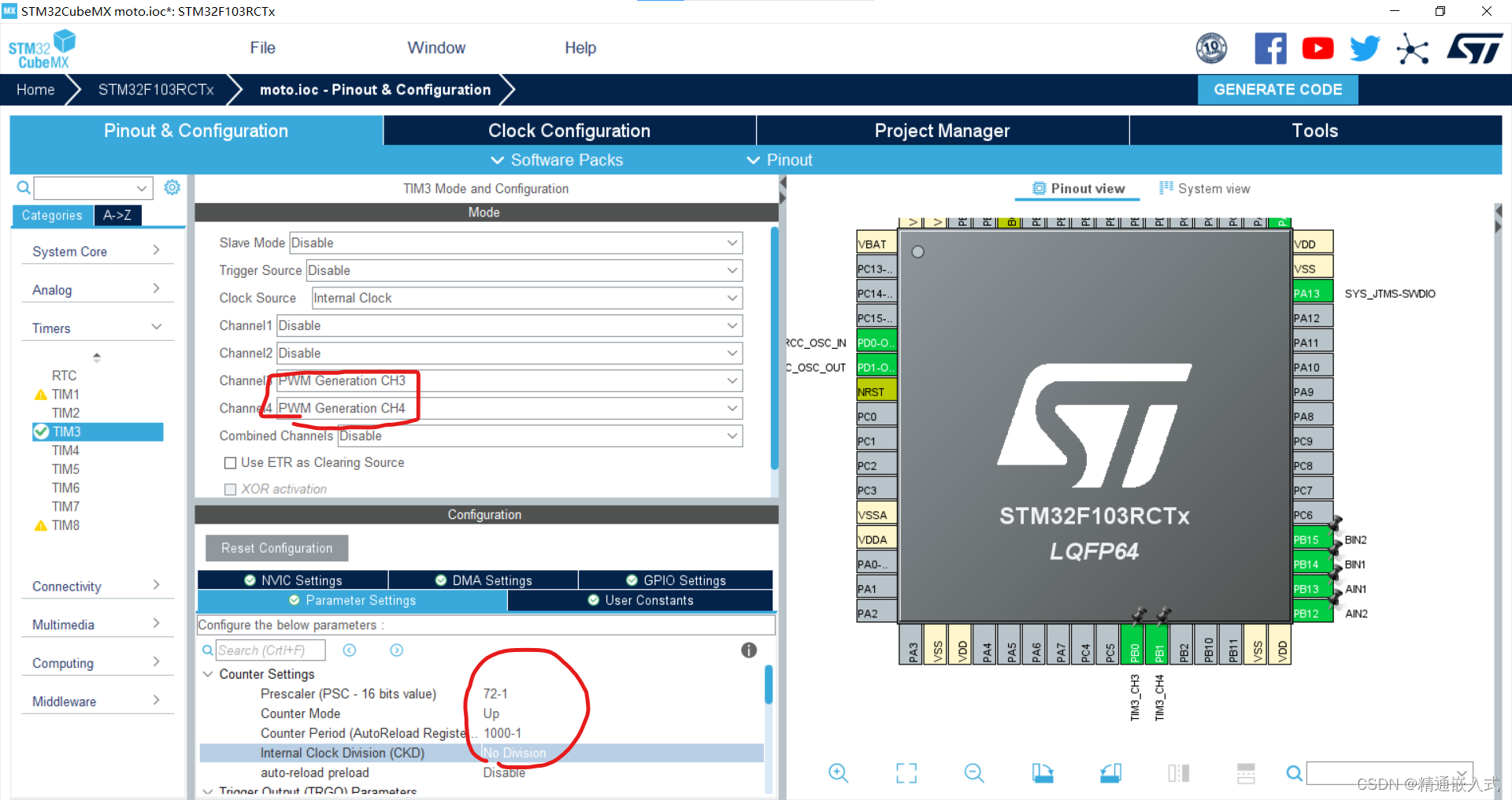
二、cubeMX配置
上篇文章讲到了PB0和PB1是控制左右电机转速的,所以我们只需要在之前的基础上将PB0和PB1设置为PWM模式即可。
三、代码解析
在原来的Moto.c和Moto.h里面添加下面代码即可
Moto.c
extern TIM_HandleTypeDef htim3;
/*
函数功能:小车速度初始化
*/
void Speed_Init(void)
{
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_4);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3, 850);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_4, 850);
}
/*
函数功能:小车速度设置
Speed:小车速度
*/
void Speed_set(u16 Speed)
{
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_3,Speed);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_4,Speed);
}
Moto.h
void Speed_Init(void);
void Speed_set(u16 Speed);
总结
基于上篇文章让小车动起来这篇文章使用了PWM去改变小车的速度,大家有什么疑问可以留言或者私信。

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)