Linux驱动开发(使用I2C总线设备驱动模型编写AT24C02驱动程序)

@TOC
前言
本篇文章将讲解如何使用I2C总线设备驱动模型编写AT24C02驱动程序。
一、I2C总线设备驱动模型
I2C设备模型驱动程序是一种新的I2C设备驱动模型,引入了设备树(Device Tree)这一机制,可以在I2C设备和相应的Linux设备节点之间建立关联。在I2C设备模型中,所有I2C设备节点共用一个I2C设备模型驱动程序,不需要为每个I2C设备节点编写独立的设备驱动程序。
下图来自百问网:
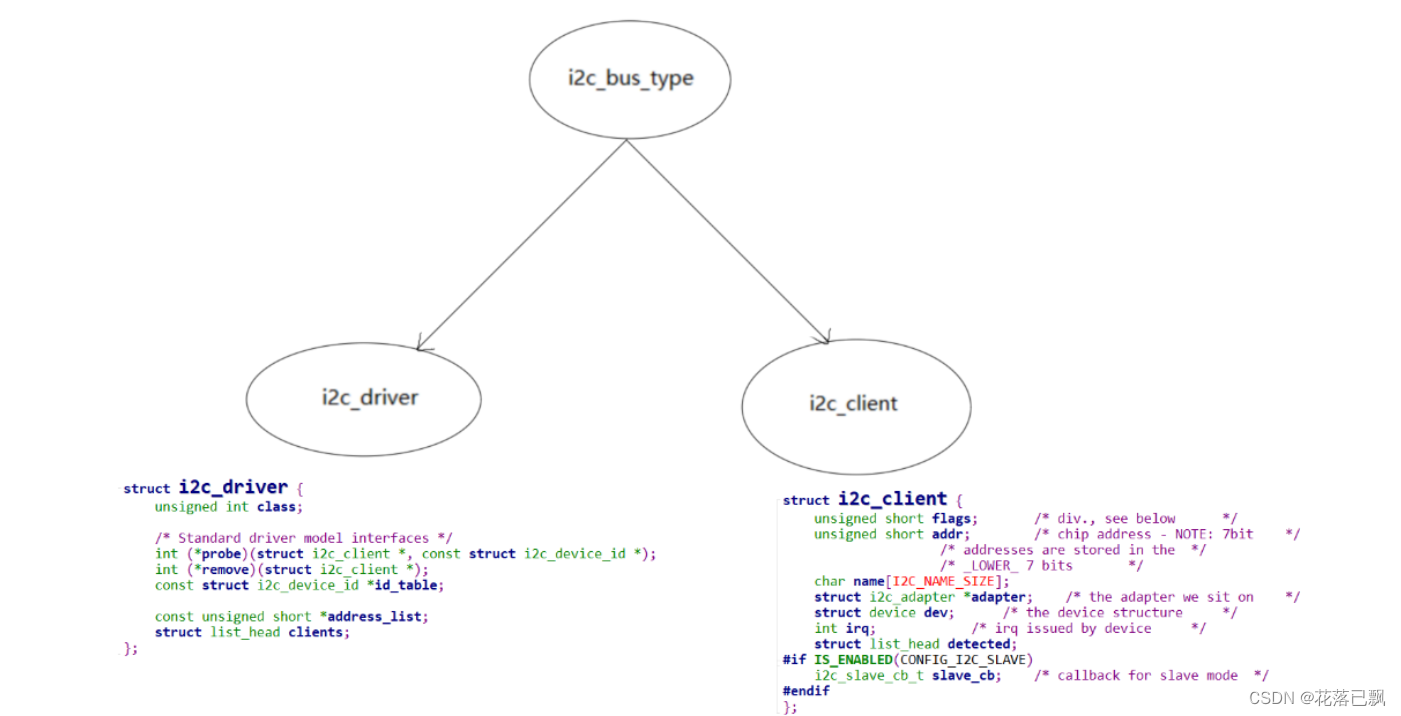
在i2c总线下分别有i2c_client和i2c_driver。i2c_client就是硬件设备(比如本篇文章用到的AT24C02),i2c_driver就是我们需要编写的驱动程序。
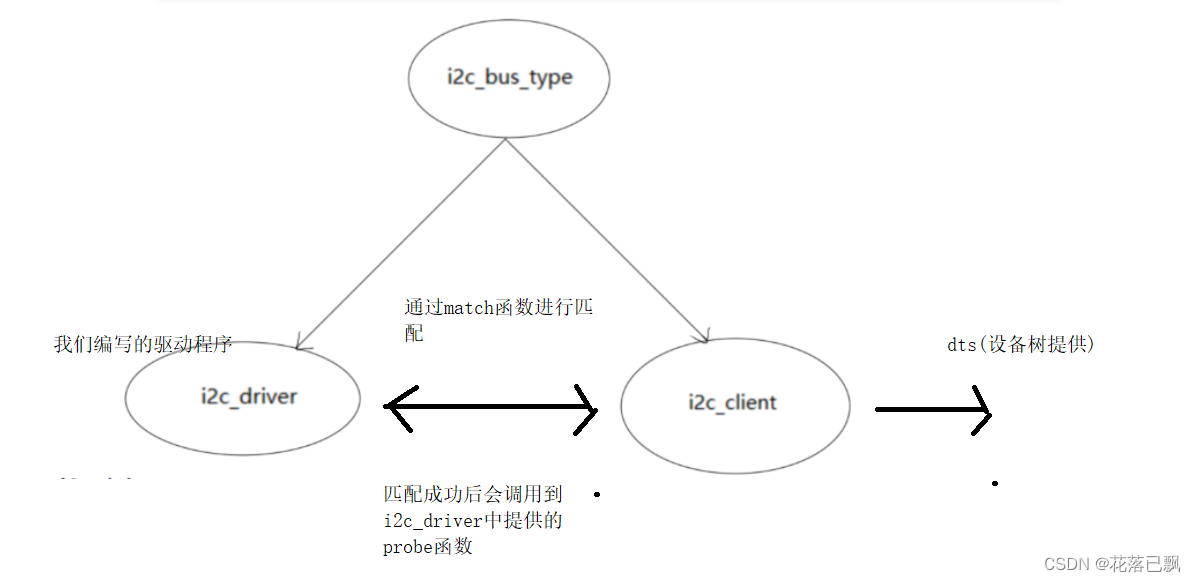
i2c_client由设备树提供。
i2c_driver是我们自己编写的驱动程序,里面提供了probe函数,当驱动和设备树中的compatible属性匹配后调用probe函数。
二、设备树编写
因为我使用的AT24C02是挂载在i2c1这根总线上的所有需要在i2c1这个节点下添加at24c02这个子节点。
reg属性代表的是AT24C02的设备地址。
&i2c1 {
clock-frequency = <100000>;
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_i2c1>;
status = "okay";
at24c02 {
compatible = "my,at24c02";
reg = <0x50>;
};
};
三、驱动程序编写
1.提供i2c_driver结构体变量并且注册
这里和之前编写的驱动程序的思路都是一样的提供一个driver结构体变量并且将其注册。
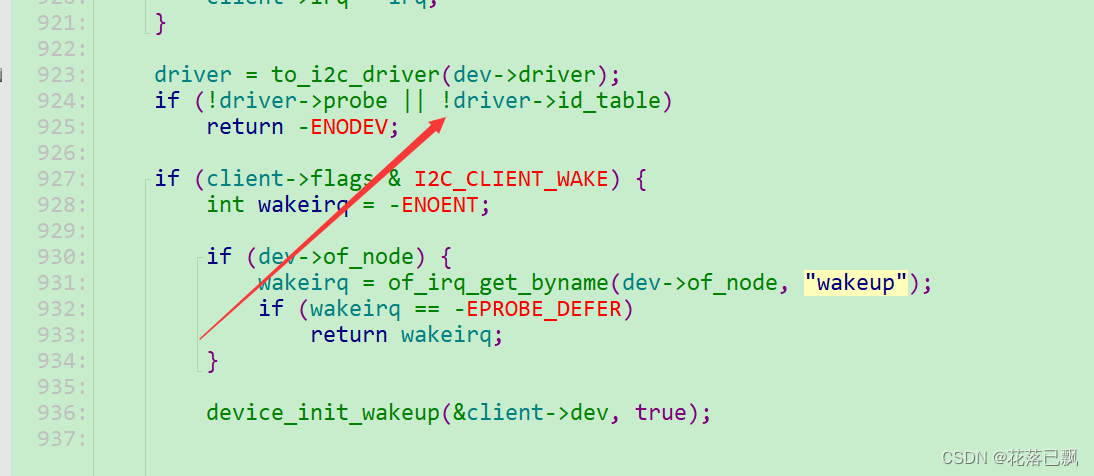
这里和之前最大的不同就是需要在i2c_driver结构体变量中提供id_table成员。
在内核源码中发现缺少了probe函数或者缺少了id_table成员都是无法进行正确的匹配的。
static const struct of_device_id at24c02_of_match[] = {
{.compatible = "my,at24c02"},
{}
};
static const struct i2c_device_id at24c02_ids[] = {
{ "xxxxyyy", (kernel_ulong_t)NULL },
{ /* END OF LIST */ }
};
static struct i2c_driver at24c02_drv = {
.driver = {
.name = "myat24c02",
.of_match_table = at24c02_of_match,
},
.probe = at24c02_probe,
.remove = at24c02_remove,
.id_table = at24c02_ids,
};
/* 2. 在入口函数注册platform_driver */
static int __init at24c02_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return i2c_add_driver(&at24c02_drv);
return err;
}
/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
* 卸载platform_driver
*/
static void __exit at24c02_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
i2c_del_driver(&at24c02_drv);
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(at24c02_init);
module_exit(at24c02_exit);
MODULE_LICENSE("GPL");
2.注册file_operations结构体
这里我们使用ioctl来操作AT24C02,ioctl既可以读又可以写,可以对read和write函数进行替换。
/* 定义自己的file_operations结构体 */
static struct file_operations at24c02_fops = {
.owner = THIS_MODULE,
.unlocked_ioctl = at24c02_chrdev_ioctl,
};
static int at24c02_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
at24c02_client = client;
/* 注册file_operations */
major = register_chrdev(0, "100ask_at24c02", &at24c02_fops); /* /dev/at24c02 */
at24c02_class = class_create(THIS_MODULE, "100ask_at24c02_class");
if (IS_ERR(at24c02_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_at24c02");
return PTR_ERR(at24c02_class);
}
device_create(at24c02_class, NULL, MKDEV(major, 0), NULL, "100ask_at24c02"); /* /dev/100ask_at24c02 */
return 0;
}
static int at24c02_remove(struct i2c_client *client)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(at24c02_class, MKDEV(major, 0));
class_destroy(at24c02_class);
unregister_chrdev(major, "100ask_at24c02");
return 0;
}
3.操作AT24C02
根据AT24C02的数据手册我们可以清楚的知道如何去读写AT24C02。
写AT24C02时序:
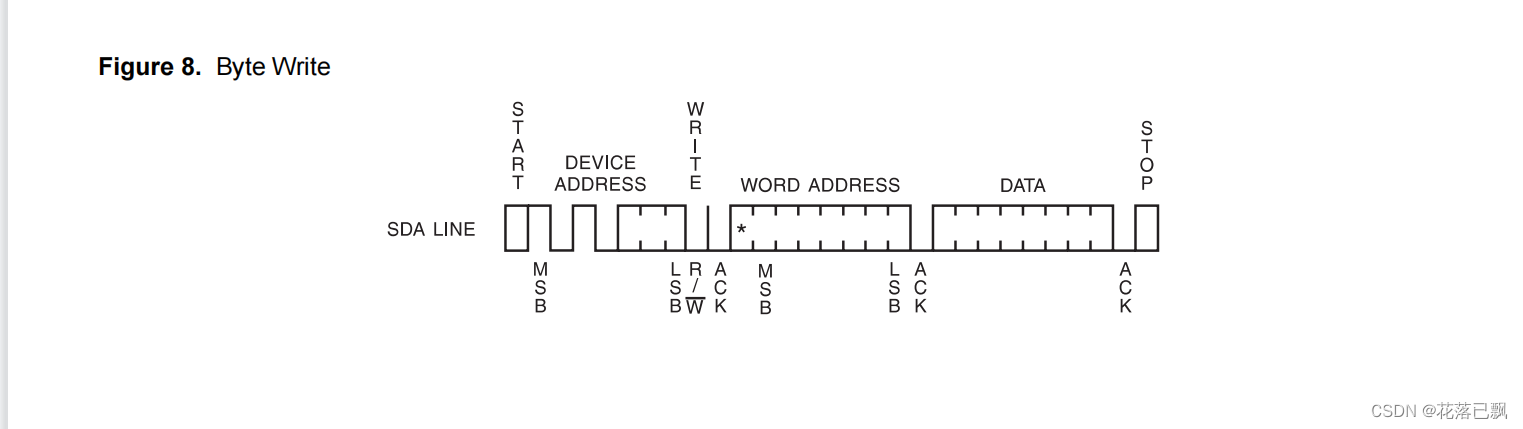
写AT24C02时需要发送设备地址和需要写入的数据,写入数据的地址,只需要构造一个msg消息即可。
读AT24C02时序:
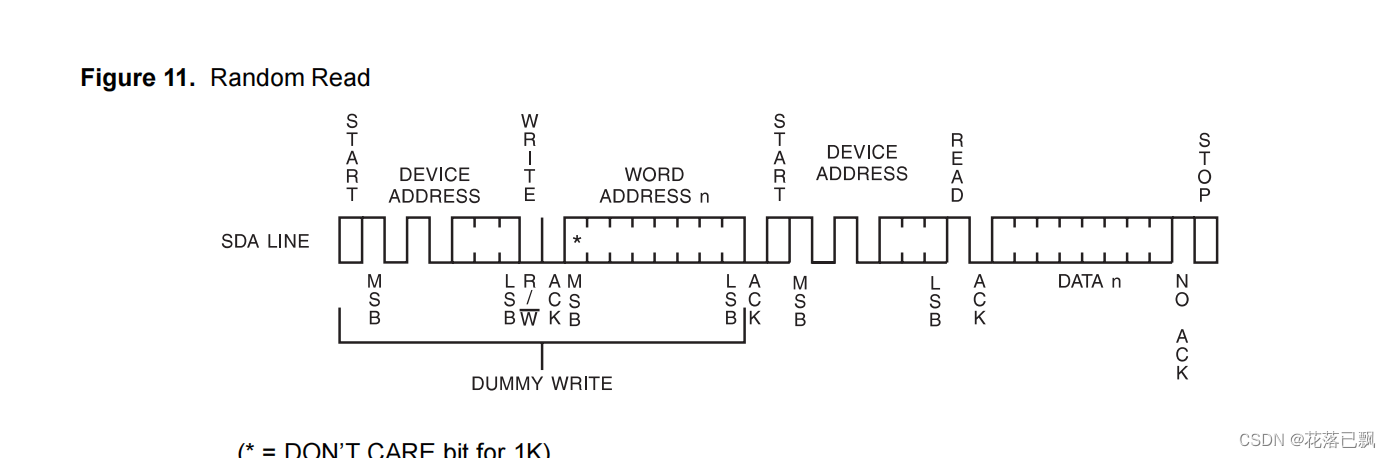
读AT24C02时首先需要写入设备地址,再去读取指定要读取数据的地址。 然后再发起一次操作,指定设备地址,指定读取数据保存的地址。一共需要构造两个msg消息。
#define IOC_AT24C02_READ 100
#define IOC_AT24C02_WRITE 101
/* 主设备号 */
static int major = 0;
static struct class *at24c02_class;
struct i2c_client *at24c02_client;
static long at24c02_chrdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
unsigned char addr;
unsigned char data;
unsigned int ker_buf[2];
unsigned int *usr_buf = (unsigned int *)arg;
unsigned char byte_buf[2];
struct i2c_msg msgs[2];
copy_from_user(ker_buf, usr_buf, 8);
addr = ker_buf[0];
switch (cmd)
{
case IOC_AT24C02_READ:
{
/* 读AT24C02 */
msgs[0].addr = at24c02_client->addr;
msgs[0].flags = 0; /* 写 */
msgs[0].len = 1;
msgs[0].buf = &addr;
msgs[1].addr = at24c02_client->addr;
msgs[1].flags = I2C_M_RD; /* 读 */
msgs[1].len = 1;
msgs[1].buf = &data;
i2c_transfer(at24c02_client->adapter, msgs, 2);
ker_buf[1] = data;
copy_to_user(usr_buf, ker_buf, 8);
break;
}
case IOC_AT24C02_WRITE:
{
/* 写AT24C02 */
byte_buf[0] = addr;
byte_buf[1] = ker_buf[1];
msgs[0].addr = at24c02_client->addr;
msgs[0].flags = 0; /* 写 */
msgs[0].len = 2;
msgs[0].buf = byte_buf;
i2c_transfer(at24c02_client->adapter, msgs, 1);
mdelay(20);
break;
}
}
return 0;
}
完整代码:
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/slab.h>
#include <linux/delay.h>
#include <linux/mutex.h>
#include <linux/mod_devicetable.h>
#include <linux/log2.h>
#include <linux/bitops.h>
#include <linux/jiffies.h>
#include <linux/of.h>
#include <linux/acpi.h>
#include <linux/i2c.h>
#include <asm/uaccess.h>
#define IOC_AT24C02_READ 100
#define IOC_AT24C02_WRITE 101
/* 主设备号 */
static int major = 0;
static struct class *at24c02_class;
struct i2c_client *at24c02_client;
static long at24c02_chrdev_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
unsigned char addr;
unsigned char data;
unsigned int ker_buf[2];
unsigned int *usr_buf = (unsigned int *)arg;
unsigned char byte_buf[2];
struct i2c_msg msgs[2];
copy_from_user(ker_buf, usr_buf, 8);
addr = ker_buf[0];
switch (cmd)
{
case IOC_AT24C02_READ:
{
/* 读AT24C02 */
msgs[0].addr = at24c02_client->addr;
msgs[0].flags = 0; /* 写 */
msgs[0].len = 1;
msgs[0].buf = &addr;
msgs[1].addr = at24c02_client->addr;
msgs[1].flags = I2C_M_RD; /* 读 */
msgs[1].len = 1;
msgs[1].buf = &data;
i2c_transfer(at24c02_client->adapter, msgs, 2);
ker_buf[1] = data;
copy_to_user(usr_buf, ker_buf, 8);
break;
}
case IOC_AT24C02_WRITE:
{
/* 写AT24C02 */
byte_buf[0] = addr;
byte_buf[1] = ker_buf[1];
msgs[0].addr = at24c02_client->addr;
msgs[0].flags = 0; /* 写 */
msgs[0].len = 2;
msgs[0].buf = byte_buf;
i2c_transfer(at24c02_client->adapter, msgs, 1);
mdelay(20);
break;
}
}
return 0;
}
/* 定义自己的file_operations结构体 */
static struct file_operations at24c02_fops = {
.owner = THIS_MODULE,
.unlocked_ioctl = at24c02_chrdev_ioctl,
};
static int at24c02_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
at24c02_client = client;
/* 注册file_operations */
major = register_chrdev(0, "100ask_at24c02", &at24c02_fops); /* /dev/at24c02 */
at24c02_class = class_create(THIS_MODULE, "100ask_at24c02_class");
if (IS_ERR(at24c02_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_at24c02");
return PTR_ERR(at24c02_class);
}
device_create(at24c02_class, NULL, MKDEV(major, 0), NULL, "100ask_at24c02"); /* /dev/100ask_at24c02 */
return 0;
}
static int at24c02_remove(struct i2c_client *client)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(at24c02_class, MKDEV(major, 0));
class_destroy(at24c02_class);
unregister_chrdev(major, "100ask_at24c02");
return 0;
}
static const struct of_device_id at24c02_of_match[] = {
{.compatible = "my,at24c02"},
{}
};
static const struct i2c_device_id at24c02_ids[] = {
{ "xxxxyyy", (kernel_ulong_t)NULL },
{ /* END OF LIST */ }
};
static struct i2c_driver at24c02_drv = {
.driver = {
.name = "myat24c02",
.of_match_table = at24c02_of_match,
},
.probe = at24c02_probe,
.remove = at24c02_remove,
.id_table = at24c02_ids,
};
/* 2. 在入口函数注册platform_driver */
static int __init at24c02_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return i2c_add_driver(&at24c02_drv);
return err;
}
/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
* 卸载platform_driver
*/
static void __exit at24c02_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
i2c_del_driver(&at24c02_drv);
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(at24c02_init);
module_exit(at24c02_exit);
MODULE_LICENSE("GPL");
四、应用程序编写
#include <stdlib.h>
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#define IOC_AT24C02_READ 100
#define IOC_AT24C02_WRITE 101
/*
* at24c02_test /dev/myat24c02 r 10
* at24c02_test /dev/myat24c02 w 10 123
*/
int main(int argc, char **argv)
{
int fd;
int buf[2];
if ((argc != 4) && (argc != 5))
{
printf("Usage: %s <dev> r <addr>\n", argv[0]);
printf(" %s <dev> w <addr> <val>\n", argv[0]);
return -1;
}
fd = open(argv[1], O_RDWR);
if (fd < 0)
{
printf(" can not open %s\n", argv[1]);
return -1;
}
if (argv[2][0] == 'r')
{
buf[0] = strtoul(argv[3], NULL, 0);
ioctl(fd, IOC_AT24C02_READ, buf);
printf("Read addr 0x%x, get data 0x%x\n", buf[0], buf[1]);
}
else
{
buf[0] = strtoul(argv[3], NULL, 0);
buf[1] = strtoul(argv[4], NULL, 0);
ioctl(fd, IOC_AT24C02_WRITE, buf);
}
return 0;
}
五、上机测试
装载驱动后进入/sys/bus/i2c/devices目录下找到我们自己编写的驱动程序:
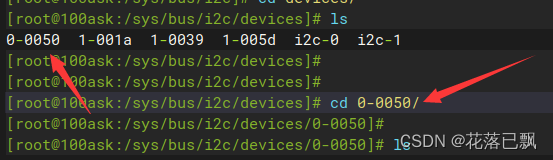
进入0-0050目录使用cat命令查看具体信息:

根据信息可以得知驱动程序装载成功。
进行at24c02的读写操作:
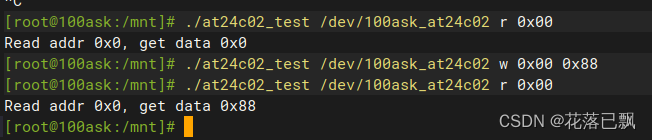
读写测试通过。
总结
本篇文章主要讲解了i2C总线设备驱动模型编写AT24C02驱动程序,这里大家主要需要掌握的就是i2C总线设备驱动这个模型,只要掌握好了这个模型那么剩下的就是裸机的操作了。

- 点赞
- 收藏
- 关注作者
评论(0)