状态机设计举例

⭐本专栏针对FPGA进行入门学习,从数电中常见的逻辑代数讲起,结合Verilog HDL语言学习与仿真,主要对组合逻辑电路与时序逻辑电路进行分析与设计,对状态机FSM进行剖析与建模。
🔥文章和代码已归档至【Github仓库:hardware-tutorial】,需要的朋友们自取。或者关注公众号【AIShareLab】,回复 FPGA 也可获取。
汽车尾灯控制电路设计
重点介绍构造状态图的两种方法:一是试探法,二是基于算法状态机构造状态图的方法。
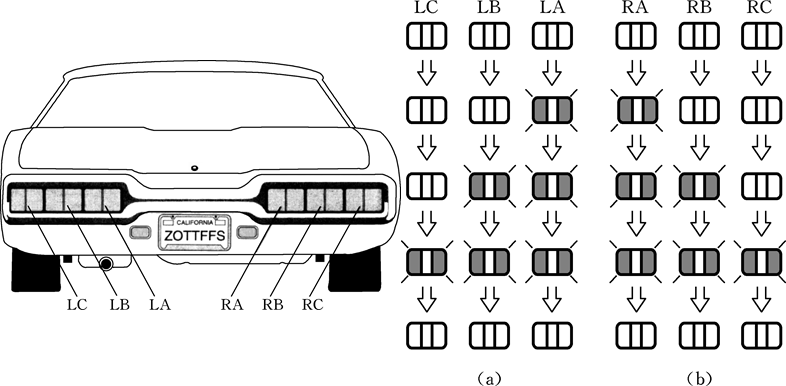
例 (试探法)汽车尾灯发出的信号主要是给后面行驶汽车的司机看的,通常汽车驾驶室有刹车开关(HAZ)、左转弯开关(LEFT)和右转弯开关(RIGHT),司机通过操作这3个开关给出车辆的行驶状态。假设在汽车尾部左、右两侧各有3个指示灯,分别用LA、LB、LC、RA、RB、RC表示,如图所示。这些灯的亮、灭规律如下:
- 汽车正常行驶时,尾部两侧的6个灯全部熄灭。
- 刹车时,汽车尾灯工作在告警状态,所有6个灯按一定频率闪烁(或一直保持常亮状态)。
- 左转弯时,左侧3个灯轮流顺序点亮(或按一定频率闪烁),其规律如图(a)所示,右侧灯全灭。
- 右转弯时,右侧3个灯轮流顺序点亮(或按一定频率闪烁),其规律如图(b)所示,左侧灯全灭。
假设电路的输入时钟信号为CP,CP的频率对于汽车尾灯所要求的闪烁频率。试根据上述要求设计出一个时钟同步的状态机来控制汽车的尾灯。
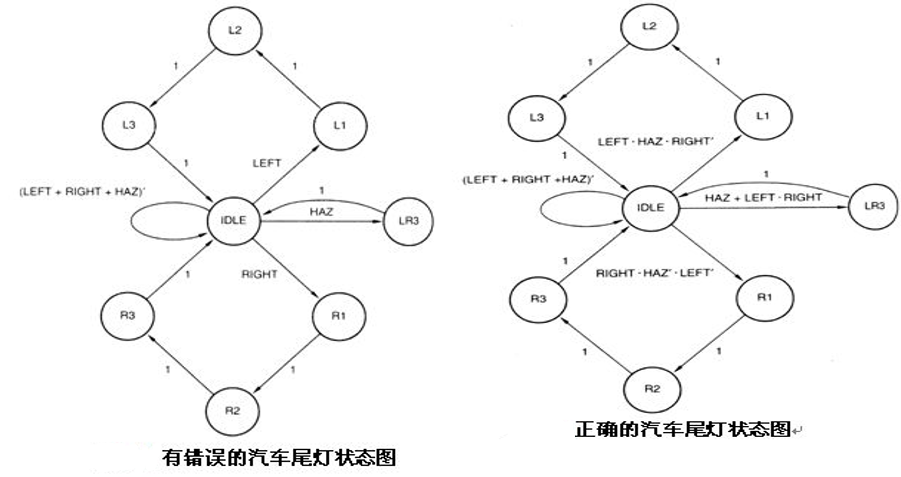
(1)画出原始状态图
选择Moore机设计该电路,则尾灯的亮、灭直接由状态译码就可以得到。由设计要求可知:汽车左转弯时,右边的灯不亮而左边的灯依次循环点亮,即0个、1个、2个或3个灯亮,分别用L0、L1、L2、L3表示,状态机在4个状态中循环。同理,汽车右转弯时,状态机也会在4个状态中循环,即左边灯不亮而右边的灯有0个、1个、2个或3个灯亮,分别用R0、R1、R2、R3表示。由于L0和R0都表示6个灯不亮,所以合起来用IDLE表示。将6个灯都亮的状态用LR3表示。可得原始的状态图就画出来了,如图所示。
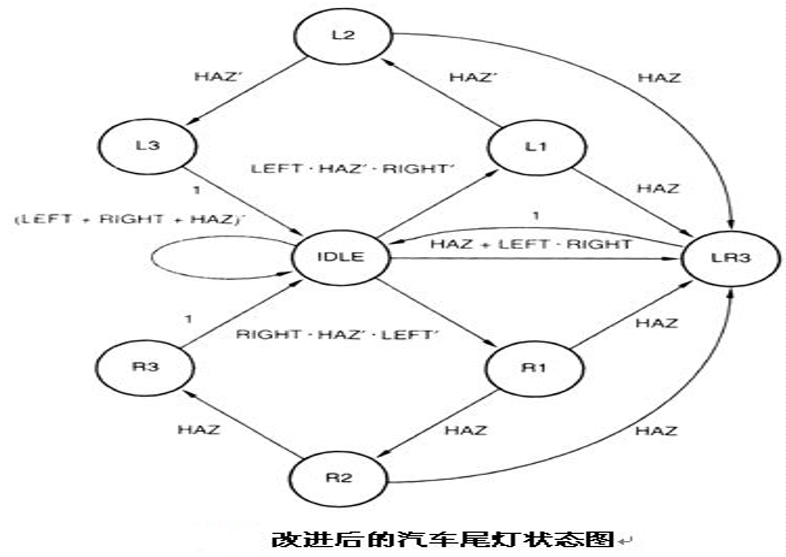
分析一下下图,就会发现一个没有考虑到的实际问题,即如果多个输入同时有效,状态机如何工作呢?下图解决了多个输入同时有效的问题,并将LEFT和RIGHT同时有效的情况处理成告警状态。经过改进且具有这一特性的状态图如下所示。
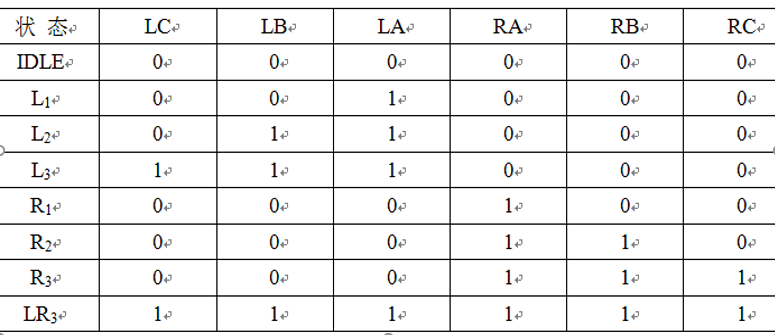
(2)列出电路的输出
由于电路的输出信号较多,不便于写在状态图中,所以单独列出输出逻辑真值表,如表所示。
(3)选择一种编码方案,对上述状态图进行状态分配,然后用Verilog HDL描述状态图和输出逻辑。
状态图完成后,必须进行完备性和互斥性的检查。
①完备性的检查方法是:对于每一个状态,将所有脱离这一状态的条件表达式进行逻辑或运算,如果结果为1就是完备的。否则不完备,也就是说状态图进入某状态后,却不能跳出该状态。
②互斥性的检查方法是:对于每一个状态,将所有脱离这一状态的条件表达式找出来,然后任意两个表达式进行逻辑与运算,如果结果为0就是互斥的。也就是要保证在任何时候不会同时激活两个脱离状态的转换,即从一个状态跳到两个状态。
应用算法状态机设计十字路口交通灯控制电路
算法状态机ASM(Algorithmic State Machine)图是描述数字系统控制算法的流程图。应用ASM图设计数字系统,可以很容易将语言描述的设计问题变成时序流程图的描述,根据时序流程图就可以得到电路的状态图和输出函数,从而得出相应的硬件电路。
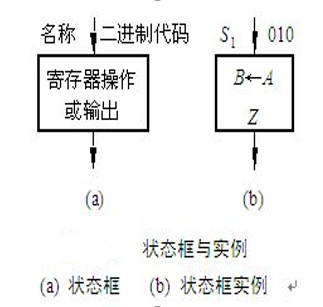
1.ASM图的状态框、判断框和输出框。
ASM图中有三种基本的符号,即状态框、判断框和输出框。数字系统控制序列中的状态用状态框表示,如图(a)所示。图(b)为状态框实例。图中的箭头表示系统状态的流向。
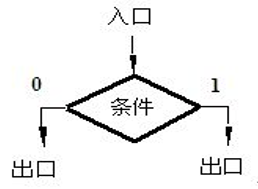
判断框表示状态变量对控制器工作的影响,如图所示:
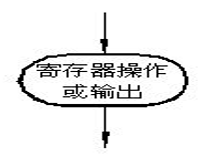
条件输出框如下图所示,条件框的入口必定与判断框的输出相连。
2.ASM图中各种逻辑框之间的时间关系
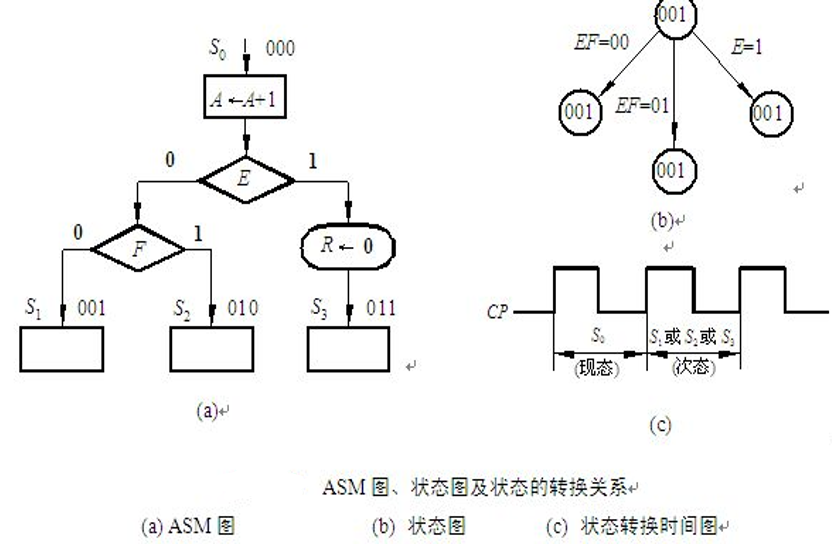
从表面上来看ASM图与程序流程图很相似,但实际上有很大的差异。程序流程图只表示事件发生的先后顺序,没有时间概念,而ASM图则不同,它表示事件的精确时间间隔顺序。在ASM图中每一个状态框表示一个时钟周期内的系统状态,状态框和与之相连的判断框,条件输出框所规定的操作,都是在一个共同的时钟周期实现的,同时系统的控制器从现在状态(现态)转移到下一个状态(次态)。因此,可以很容易将图(a)所示的ASM图转换成状态图,如图(b)所示,其中E和F为状态转换条件。与ASM图不同,状态图无法表示寄存器操作。
图(c)给出了ASM图的各种操作及状态转换的时间图。
3.十字路口交通灯控制电路设计举例
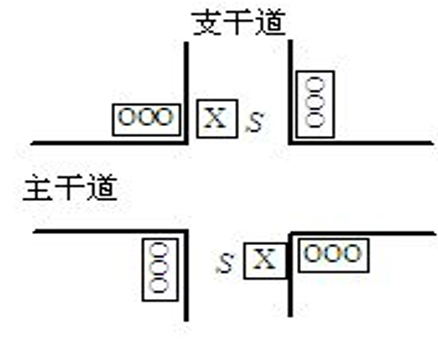
例(基于算法状态机构造状态图的方法)图4.4.10表示位于主干道和支干道的十字路口交通灯系统,支干道两边安装有传感器S(Sensor),试设计一个主干道和支干道十字路口的交通灯控制电路,其技术要求如下:
- 一般情况下,保持主干道畅通,主干道绿灯亮、支干道红灯亮,并且主干道绿灯亮的时间不得少于60秒。
- 主干道车辆通行时间已经达到60秒,且支干道有车时,则主干道红灯亮、支干道绿灯亮,但支干道绿灯亮的时间不得超过30秒。
- 每次主干道或支干道绿灯变红灯时,黄灯先亮5秒钟。
设计步骤:
- 明确系统的功能,进行逻辑抽象
- 确定系统方案并画出ASM图
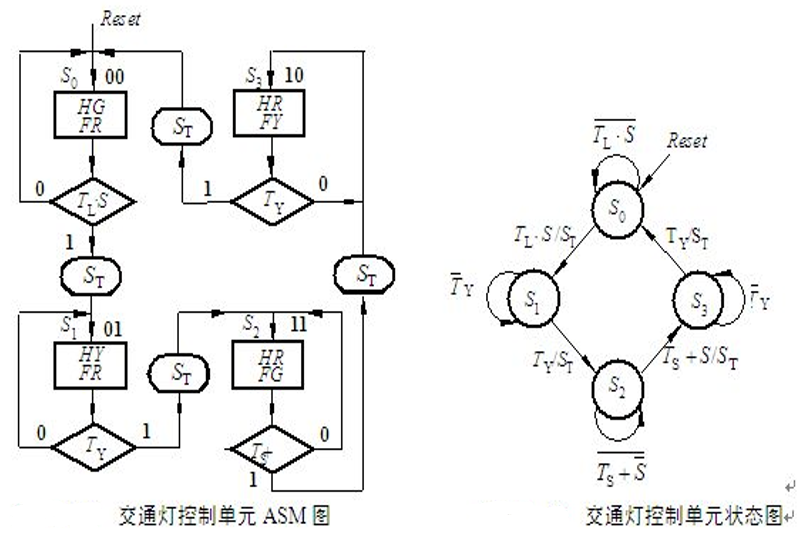
交通灯控制单元的控制过程分为四个阶段,对应的输出有四种状态,分别用S0, S1, S2和S3表示:
S0状态:主干道绿灯亮支干道红灯亮,此时若支干道有车等待通过,而且主干道绿灯已亮足规定的时间间隔TL(60s),控制器发出状态转换信号ST,控制器从状态S0转换到S1。
S1状态:主干道黄灯亮,支干道红灯亮,进入此状态,黄灯亮足规定的时间间隔TY(5s)时,控制器发出状态转换信号ST,控制器从状态S1转换到S2。
S2状态:支干道绿灯亮,主干道红灯亮,若此时支干道继续有车,则继续保持此状态,但支干道绿灯亮的时间不得超过TS(30s)时间间隔,否则控制单元发出状态转换信号ST,控制器转换到S3状态。
S3状态:支干道黄灯亮,主干道红灯亮,此时状态与S1状态持续的时间间隔相同,均为TY(5s) ,时间到时,控制器发出ST信号,控制器从状态S3回到S0状态。
对上述S0、S1、S2和S3四种状态按照格雷码进行状态编码,分别为00,01,11和10,由此得到交通灯控制单元的ASM图如图所示。依此类推得出所示的状态图。
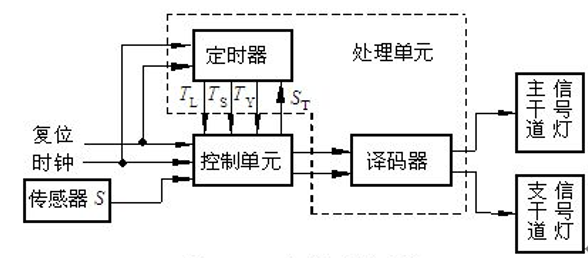
(3)交通灯控制器各功能模块电路的框架设计
通过分析交通灯控制电路的要求可知,系统主要由传感器S(Sensor)、时钟脉冲产生器(CLK )、定时器(TL, TS, TY)、控制器及译码器构成,传感器S在有车辆通过时发出一个高电平信号。
①设计控制器
根据交通灯控制单元的ASM图,得出其状态图如图4.4.13所示。ASM图中的状态框与状态图中的状态相对应,判断框中的条件是状态转换的输入条件,条件输出框与控制单元状态转换的输出相对应。状态图是描述状态之间的转换。
②设计定时器
定时器由与系统秒脉冲同步的计数器构成,时钟脉冲上升沿到来时,在控制信号ST作用下,计数器从零开始计数,并向控制器提供模M5、M30和M60信号,即TY、TS和TL定时时间信号。
③设计译码器
当交通灯控制电路处于不同工作状态时,交通信号灯按一定的规律与之对应。
(4)用Verilog HDL描述交通灯控制电路
根据以上设计思路,可以写出交通灯控制电路的Verilog HDL代码如下:
//--------------- controller.v ---------------
// Traffic Signal Controller
//State definition HighWay Country
`define S0 2'b00 //GREEN RED,采用宏定义方式给出状态编码
`define S1 2'b01 //YELLOW RED,不建议采用此方法
`define S2 2'b11 //RED GREEN
`define S3 2'b10 //RED YELLOW
module controller (CLK, S, nRESET, HG, HY, HR, FG, FY, FR, TimerH, TimerL);
//I/O ports
input CLK, S, nRESET; //if S=1, indicates that there is car on the country road
output HG, HY, HR, FG, FY, FR;
//declared output signals are registers
reg HG, HY, HR, FG, FY, FR;
output [3:0] TimerH;
output [3:0] TimerL;
reg [3:0] TimerH, TimerL;
//Internal state variables
wire Tl, Ts, Ty; //timer output signals
reg St; //state translate signal
reg [1:0] CurrentState, NextState; //FSM state register
/*===== Description of the timer block =====*/
always @(posedge CLK or negedge nRESET )
begin: counter
if (~nRESET) {TimerH, TimerL} <= 8'h00;
else if (St) {TimerH, TimerL} <= 8'h00;
else if ((TimerH == 5) & (TimerL == 9))
begin {TimerH, TimerL} <= {TimerH, TimerL}; end
else if (TimerL == 9)
begin TimerH <= TimerH + 1; TimerL <= 0; end
else
begin TimerH <= TimerH; TimerL <= TimerL + 1; end
end // BCD counter
assign Ty = (TimerH==0)&(TimerL==4);
assign Ts = (TimerH==2)&(TimerL==9);
assign Tl = (TimerH==5)&(TimerL==9);
/*===== Description of the signal controller block =====*/
//FSM register:State change only at positive edge of clock
always @(posedge CLK or negedge nRESET )
begin: statereg
if (~nRESET) //Signal controller starts in S0 state
CurrentState <= `S0;
else CurrentState <= NextState;
end //statereg
// FSM combinational block: state machine using case statements
always @(S or CurrentState or Tl or Ts or Ty )
begin: fsm
case(CurrentState)
`S0: begin //S0是用define定义的,在引用时要加右撇号(反撇号)
NextState = (Tl && S) ? `S1 :`S0;
St = (Tl && S) ? 1:0;
end
`S1: begin
NextState = (Ty) ? `S2 :`S1;
St = (Ty) ? 1:0;
end
`S2: begin
NextState = (Ts || ~S) ? `S3 :`S2;
St = (Ts || ~S) ? 1:0;
end
`S3: begin
NextState = (Ty) ? `S0 :`S3;
St = (Ty) ? 1:0;
end
endcase
end //fsm
/*===== Description of the decoder block =====*/
//Compute values of main signal and country signal
always @(CurrentState)
begin
case (CurrentState)
`S0: begin
{HG, HY, HR} = 3'b100; //Highway signal is green
{FG, FY, FR} = 3'b001; //Country signal is red
end
`S1: begin
{HG, HY, HR} = 3'b010; //Highway signal is yellow
{FG, FY, FR} = 3'b001; //Country signal is red
end
`S2: begin
{HG, HY, HR} = 3'b001; //Highway signal is red
{FG, FY, FR} = 3'b100; //Country signal is green
end
`S3: begin
{HG, HY, HR} = 3'b001; //Highway signal is red
{FG, FY, FR} = 3'b010; //Country signal is yellow
end
endcase
end
endmodule
状态机设计准则
状态机要安全,是指FSM不会进入死循环,特别是不会进入非预知的状态,而且由于某些扰动进入非设计状态,也能很快的恢复到正常的状态循环中来。这里面有两层含意:
其一要求该FSM的综合实现结果无毛刺等异常扰动;
其二要求FSM要完备,即使受到异常扰动进入非设计状态,也能很快恢复到正常状态。
状态机的设计要满足设计的面积和速度的要求;
状态机的设计要清晰易懂、易维护.
FSM输出方法
ONE HOT编码
使用N位状态寄存器表达具有Ng 状态的FSM,每个状态具有独立的寄存器位。任意时刻只有1位寄存器为1,即hot point。此为one hot。
One hot 编码方程用简单的次态方程驱动,减少了状态寄存器之间的组合逻辑级数,因此提高了运行速度。同时是以牺牲寄存器逻辑资源和提高成本为代价的。
目标器件具有较多寄存器资源,寄存器之间组合逻辑较少时比较适用。
有限状态机HDL描述规则
单独用一个模块来描述一个有限状态机。这样易于简化状态的定义、调试和修改;同时,也可使用EDA工具来进行综合与优化。
使用代表状态名的参数(parameter)来给状态赋值,不使用宏定义(define)。宏定义产生全局定义,参数则仅仅定义一个模块内的局部定义常量。不宜产生冲突。
在always组合块中使用阻塞赋值,在always时序块中使用非阻塞赋值。
可靠性与容错性
状态机应该有一个默认(default)状态,当转移条件不满足,或者状态发生了突变时,要能保证逻辑不会陷入“死循环” ;
状态机剩余状态的设置(3个去向):
a) 转入空闲状态,等待下一个工作任务的到来;
b) 转入指定的状态,去执行特定任务;
c) 转入预定义的专门处理错误的状态,如预警状态。
参考文献:
- Verilog HDL与FPGA数字系统设计,罗杰,机械工业出版社,2015年04月
- Verilog HDL与CPLD/FPGA项目开发教程(第2版), 聂章龙, 机械工业出版社, 2015年12月
- Verilog HDL数字设计与综合(第2版), Samir Palnitkar著,夏宇闻等译, 电子工业出版社, 2015年08月
- Verilog HDL入门(第3版), J. BHASKER 著 夏宇闻甘伟 译, 北京航空航天大学出版社, 2019年03月
欢迎关注公众号【AIShareLab】,一起交流更多相关知识,前沿算法,Paper解读,项目源码,面经总结。

- 点赞
- 收藏
- 关注作者
评论(0)