VSLAM特征之线特征&面特征

0. 简介
相较于激光雷达而言,视觉SLAM除了点特征以外还多出了线特征以及面特征。相比于点特征而言,线特征和面特征在单一环境中会更有鲁棒性。这篇文章中作者将会围绕着线特征和面特征的数学特性进行介绍
1. 线特征
线特征:优点在于具有天然的光照及视角不变性,同时更高级的特征也使追踪的鲁棒性和准确性有所提高。特别是在特定的人造场景(室内,走廊)等场景,能够克服无纹理或者不可靠纹理带来的干扰。
而其缺点也很明显,在于线段的检测及匹配耗时相对特征点更大。同时在后端也没有一个标准且通用的SLAM优化及回环模块。线特征匹配也是较为困难的,如线段易断裂,不具备强有力的几何约束(如极线几何约束),在纹理缺失处不具有较强的辨识度等。
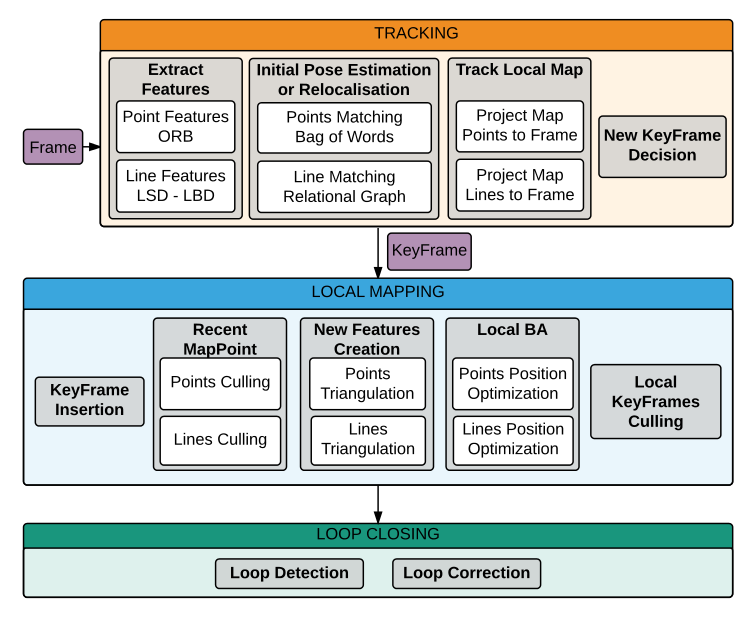
线特征的典型代表是PL-SLAM,该框架是在ORB-SLAM的框架基础之上,添加了一些与线特征有关的模块,从而构建了一套单目SLAM系统。整个系统的框架如下图所示:
对于线的描述,采用了 端点(endpoints) 的方法,毕竟现实中,几乎不不可能碰到无限延伸的直线,几乎都是线段,所以,用端点的方法来描述直线是比较合理的。我们假设 是空间直线的两个端点, 是其在图像中的投影坐标,另外,记 是对应的齐次坐标。于是,我们可以得到直线的参数: 。
Tip:(对于向量(x,y,1),可以在几何意义上理解为是在【第三维为常数的】平面上的一个二维向量。这种用【三】维向量表示【二】维向量,或者一般而言,用一个n+1维的向量表示一个n维向量的方法称为齐次坐标表示法。】)。
这样我们就可以得到线特征所需要的参数。然后是定义线的重投影误差(line reprojection error) ——投影线段的端点与在图像中检测到的直线之间的点到直线距离 之和: 。而 。
其中, 为上面提到的直线参数, 为空间点 投影到图像平面的坐标,而其中的 分别为相机的外参 和内参。理想情况下,空间点 的投影点是在直线上的,所以点到直线距离 ,或者说,点在直线上。
通过这样的计算就可以获取到两条线之间的重投影误差了。
2. 面特征
…详情请参照古月居

- 点赞
- 收藏
- 关注作者
评论(0)