YoloV7实战:手把手教你使用Yolov7进行物体检测(附数据集)

摘要
YoloV6出来没有多久,YoloV7就开始流行了。如今的Yolo系列的模型都是沿用了YoloV3的架构,大家都是在卷积上做了一些更改。Yolov6和Yolov7都加入了Rep的结构。如图:

图片来自:https://zhuanlan.zhihu.com/p/543743278
YOLOv7 在 5 FPS 到 160 FPS 范围内的速度和准确度都超过了所有已知的物体检测器,并且在 GPU V100 上 30 FPS 或更高的所有已知实时物体检测器中具有最高的准确度 56.8% AP。
论文翻译:https://wanghao.blog.csdn.net/article/details/126302859
代码:https://github.com/WongKinYiu/yolov7
论文链接:https://arxiv.org/abs/2207.02696
今天我们一起学习如何使用YoloV7训练自己的数据集
数据集
数据集是我自己标注的飞机数据集,下载地址:
https://download.csdn.net/download/hhhhhhhhhhwwwwwwwwww/63242994。
总共32种飞机:
[‘c17’, ‘c5’, ‘helicopter’, ‘c130’, ‘f16’, ‘b2’, ‘other’, ‘b52’, ‘kc10’, ‘command’, ‘f15’, ‘kc135’, ‘a10’, ‘b1’, ‘aew’, ‘f22’, ‘p3’, ‘p8’, ‘f35’, ‘f18’, ‘v22’, ‘f4’, ‘globalhawk’, ‘u2’, ‘su-27’, ‘il-38’, ‘tu-134’, ‘su-33’, ‘an-70’, ‘su-24’, ‘tu-22’, ‘il-76’]
接下来是如何制作yolov6数据集,yolov6使用的数据集格式和yolov5一样。如图:
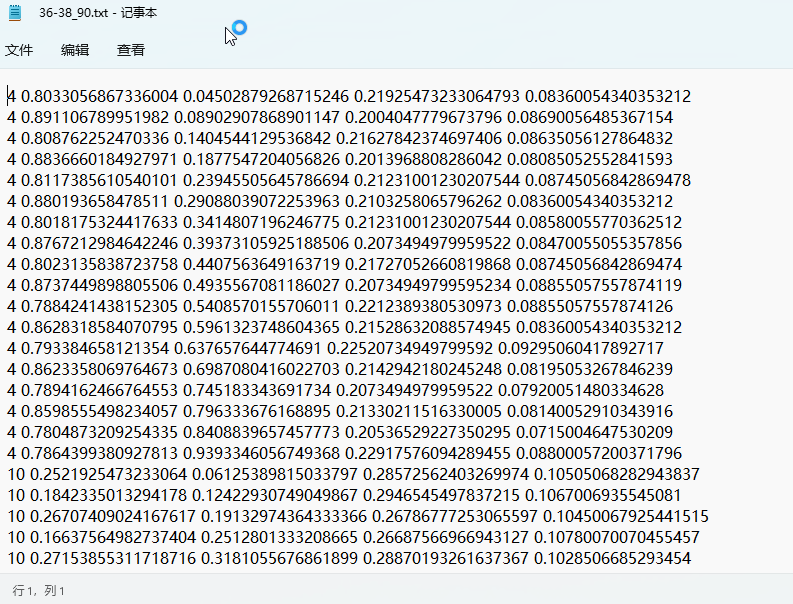
格式:类别,中心点x,中心点y,w,h。
新建脚本make_yolo_data.py,插入代码:
import os
import shutil
import numpy as np
import json
from glob import glob
import cv2
from sklearn.model_selection import train_test_split
from os import getcwd
def convert(size, box):
dw = 1. / (size[0])
dh = 1. / (size[1])
x = (box[0] + box[1]) / 2.0 - 1
y = (box[2] + box[3]) / 2.0 - 1
w = box[1] - box[0]
h = box[3] - box[2]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)
def change_2_yolo5(files, txt_Name):
imag_name=[]
for json_file_ in files:
json_filename = labelme_path + json_file_ + ".json"
out_file = open('%s/%s.txt' % (labelme_path, json_file_), 'w')
json_file = json.load(open(json_filename, "r", encoding="utf-8"))
# image_path = labelme_path + json_file['imagePath']
imag_name.append(json_file_+'.jpg')
height, width, channels = cv2.imread(labelme_path + json_file_ + ".jpg").shape
for multi in json_file["shapes"]:
points = np.array(multi["points"])
xmin = min(points[:, 0]) if min(points[:, 0]) > 0 else 0
xmax = max(points[:, 0]) if max(points[:, 0]) > 0 else 0
ymin = min(points[:, 1]) if min(points[:, 1]) > 0 else 0
ymax = max(points[:, 1]) if max(points[:, 1]) > 0 else 0
label = multi["label"].lower()
if xmax <= xmin:
pass
elif ymax <= ymin:
pass
else:
cls_id = classes.index(label)
b = (float(xmin), float(xmax), float(ymin), float(ymax))
bb = convert((width, height), b)
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
# print(json_filename, xmin, ymin, xmax, ymax, cls_id)
return imag_name
def image_txt_copy(files,scr_path,dst_img_path,dst_txt_path):
"""
:param files: 图片名字组成的list
:param scr_path: 图片的路径
:param dst_img_path: 图片复制到的路径
:param dst_txt_path: 图片对应的txt复制到的路径
:return:
"""
for file in files:
img_path=scr_path+file
print(file)
shutil.copy(img_path, dst_img_path+file)
scr_txt_path=scr_path+file.split('.')[0]+'.txt'
shutil.copy(scr_txt_path, dst_txt_path + file.split('.')[0]+'.txt')
if __name__ == '__main__':
classes = ['c17', 'c5', 'helicopter', 'c130', 'f16', 'b2',
'other', 'b52', 'kc10', 'command', 'f15', 'kc135', 'a10',
'b1', 'aew', 'f22', 'p3', 'p8', 'f35', 'f18', 'v22', 'f4',
'globalhawk', 'u2', 'su-27', 'il-38', 'tu-134', 'su-33',
'an-70', 'su-24', 'tu-22', 'il-76']
# 1.标签路径
labelme_path = "USA-Labelme/"
isUseTest = True # 是否创建test集
# 3.获取待处理文件
files = glob(labelme_path + "*.json")
files = [i.replace("\\", "/").split("/")[-1].split(".json")[0] for i in files]
for i in files:
print(i)
trainval_files, test_files = train_test_split(files, test_size=0.1, random_state=55)
# split
train_files, val_files = train_test_split(trainval_files, test_size=0.1, random_state=55)
train_name_list=change_2_yolo5(train_files, "train")
print(train_name_list)
val_name_list=change_2_yolo5(val_files, "val")
test_name_list=change_2_yolo5(test_files, "test")
#创建数据集文件夹。
file_List = ["train", "val", "test"]
for file in file_List:
if not os.path.exists('./VOC/images/%s' % file):
os.makedirs('./VOC/images/%s' % file)
if not os.path.exists('./VOC/labels/%s' % file):
os.makedirs('./VOC/labels/%s' % file)
image_txt_copy(train_name_list,labelme_path,'./VOC/images/train/','./VOC/labels/train/')
image_txt_copy(val_name_list, labelme_path, './VOC/images/val/', './VOC/labels/val/')
image_txt_copy(test_name_list, labelme_path, './VOC/images/test/', './VOC/labels/test/')
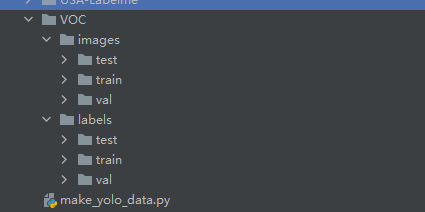
转换完成后就可以得到用于训练的数据集了,如下图:
核心思路:
第一步 使用train_test_split方法切分出训练集、验证集和测试集。
第二步 调用change_2_yolo5方法将json里面的数据转为yolov5格式的txt数据,返回训练集、验证集和测试集的图片list。
第三步 创建数据集文件夹,然后将图片和txt文件copy到对应的目录下面。
接下来就开始训练了
训练
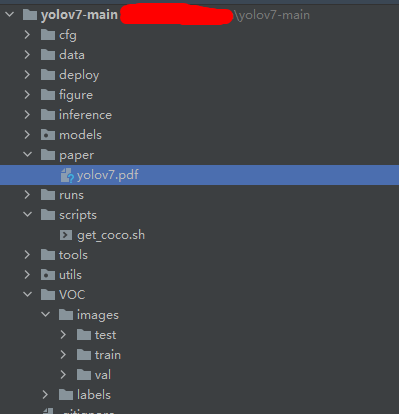
有了数据集就可以开始训练了。下载yolov7的代码,将其解压到指定的位置,然后将数据集复制到yolov7的根目录。如下图:
然后下载yolov7的权重,下载地址:
https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7.pt
如果下载中断可以使用迅雷下载。
下载完成后放在YoloV7项目的根目录。
在data目录增加VOC.yaml
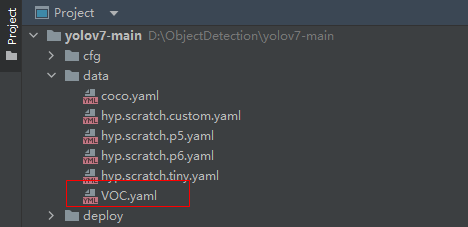
在里面填写如下内容:
# Please insure that your custom_dataset are put in same parent dir with YOLOv7_DIR
train: ./VOC/images/train # train images
val: VOC/images/val # val images
test: VOC/images/test # test images (optional)
# whether it is coco dataset, only coco dataset should be set to True.
is_coco: False
# Classes
nc: 32 # number of classes
names: ['c17', 'c5', 'helicopter', 'c130', 'f16', 'b2',
'other', 'b52', 'kc10', 'command', 'f15', 'kc135', 'a10',
'b1', 'aew', 'f22', 'p3', 'p8', 'f35', 'f18', 'v22', 'f4',
'globalhawk', 'u2', 'su-27', 'il-38', 'tu-134', 'su-33',
'an-70', 'su-24', 'tu-22', 'il-76']
修改train.py里面的参数
parser.add_argument('--weights', type=str, default='yolov7.pt', help='initial weights path')
parser.add_argument('--cfg', type=str, default='cfg/training/yolov7.yaml', help='model.yaml path')
parser.add_argument('--data', type=str, default='data/VOC.yaml', help='data.yaml path')
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=4, help='total batch size for all GPUs')
parser.add_argument('--workers', type=int, default=0, help='maximum number of dataloader workers')
weights:权重文件。
cfg:yolov7模型配置文件。
data:数据配置文件
workers:在win系统下面设置为0,否则报错。
上面修改了,检查一下环境配置是否正确,依赖包是否都安装了。
# Usage: pip install -r requirements.txt
# Base ----------------------------------------
matplotlib>=3.2.2
numpy>=1.18.5
opencv-python>=4.1.1
Pillow>=7.1.2
PyYAML>=5.3.1
requests>=2.23.0
scipy>=1.4.1
torch>=1.7.0,!=1.12.0
torchvision>=0.8.1,!=0.13.0
tqdm>=4.41.0
protobuf<4.21.3
# Logging -------------------------------------
tensorboard>=2.4.1
# wandb
# Plotting ------------------------------------
pandas>=1.1.4
seaborn>=0.11.0
# Export --------------------------------------
# coremltools>=4.1 # CoreML export
# onnx>=1.9.0 # ONNX export
# onnx-simplifier>=0.3.6 # ONNX simplifier
# scikit-learn==0.19.2 # CoreML quantization
# tensorflow>=2.4.1 # TFLite export
# tensorflowjs>=3.9.0 # TF.js export
# openvino-dev # OpenVINO export
# Extras --------------------------------------
ipython # interactive notebook
psutil # system utilization
thop # FLOPs computation
# albumentations>=1.0.3
# pycocotools>=2.0 # COCO mAP
# roboflow
如果没有问题就可以开始训练,如下图:
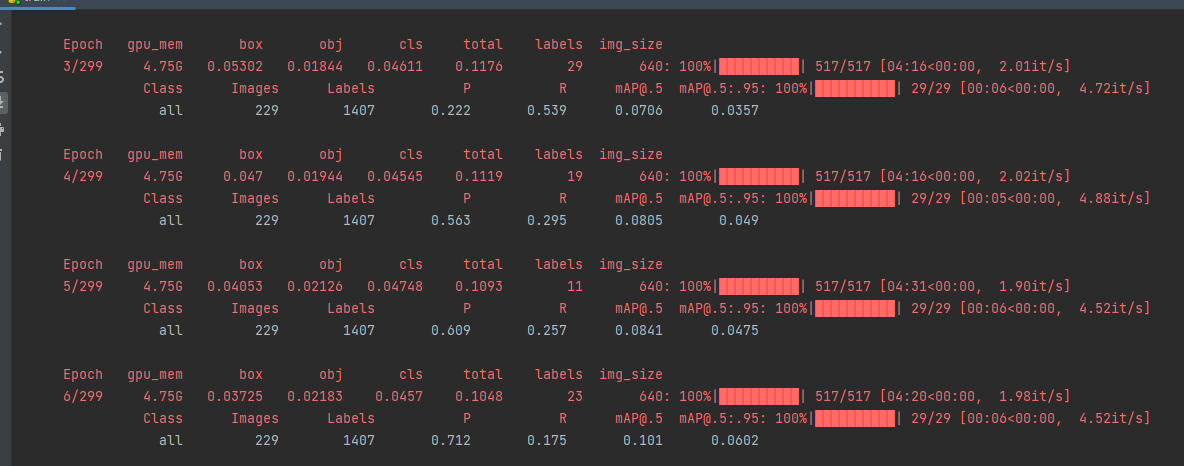
等待训练完成后就可以才是测试了。
测试
测试使用detect.py脚本文件
parser.add_argument('--weights', nargs='+', type=str, default='runs/train/exp9/weights/best.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='inference/images', help='source') # file/folder, 0 for webcam
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
weights:训练好的模型路径
source:测试图片的路径。
img-size:图片输入的大小。
conf-thres:置信度的下线。
iou-thres:IOU的阈值
device:GPU的编号,或者设置为cpu。
然后就可以运行detect.py脚本了。
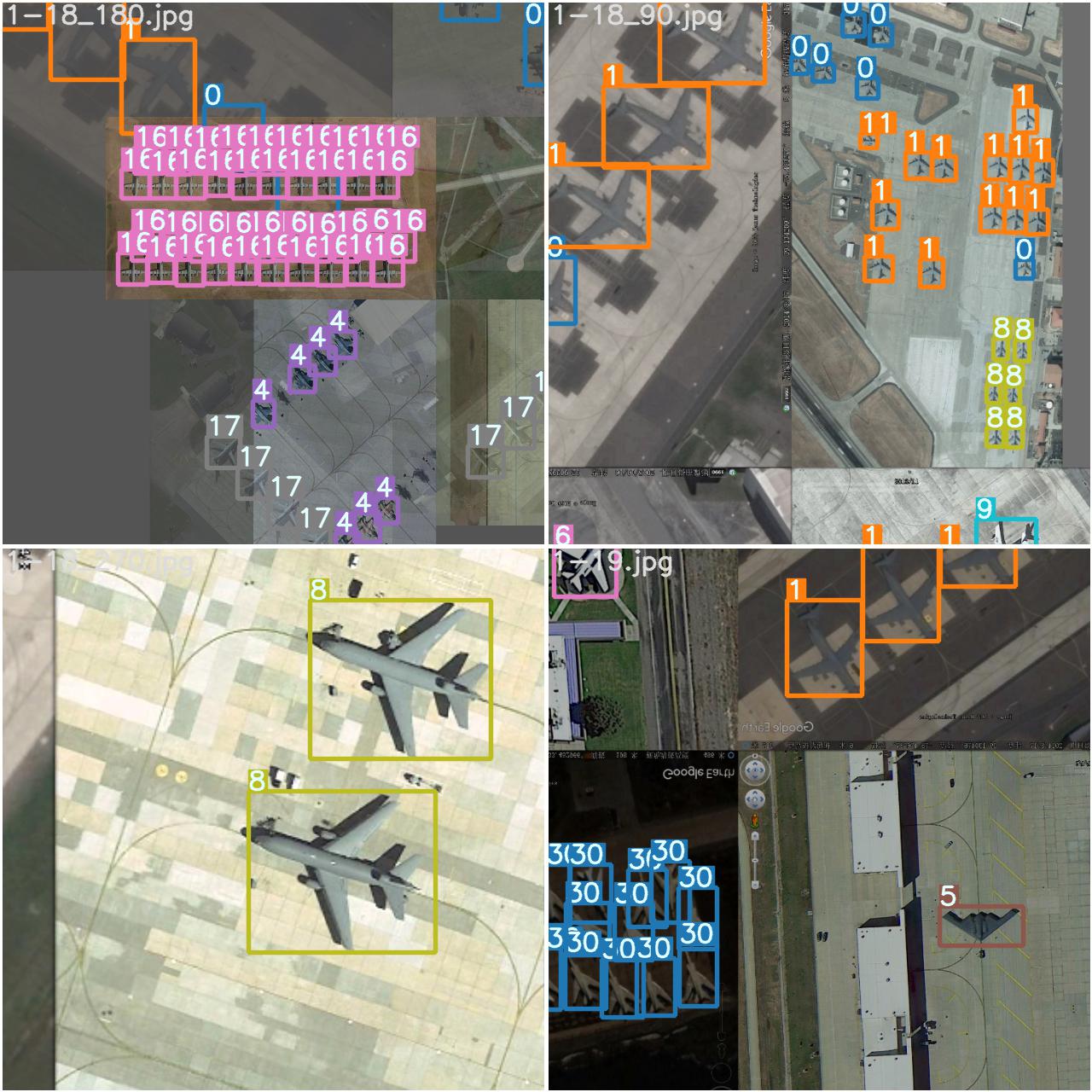
测试结果:


完整代码
https://download.csdn.net/download/hhhhhhhhhhwwwwwwwwww/86749406

- 点赞
- 收藏
- 关注作者
评论(0)