大型点云地图裁剪及定位的通用流程

【摘要】 0. 前言最近空闲时间在看点云地图的动态加载,这部分在自动驾驶领域是非常有必要的。由于点云地图的稠密性,导致我们在大场景中没办法一次性加载所有的地图,这就需要我们将地图切分成多个子地图。 1. NDT降维建立好的点云文件中,有很多点是重合的,需要通过采用合适的downsample_resolution以减小点云文件体积,便于传输和加载,通常降采样后体积可以降到原来的一半以下。同时由于NDT...
0. 前言
最近空闲时间在看点云地图的动态加载,这部分在自动驾驶领域是非常有必要的。由于点云地图的稠密性,导致我们在大场景中没办法一次性加载所有的地图,这就需要我们将地图切分成多个子地图。
1. NDT降维
建立好的点云文件中,有很多点是重合的,需要通过采用合适的downsample_resolution以减小点云文件体积,便于传输和加载,通常降采样后体积可以降到原来的一半以下。同时由于NDT的特性,降采样后并不会影响最终的匹配定位效果。
所以作为大地图我们需要先通过NDT对地图进行预处理,来减少频繁的IO操作并降低内存的占用。
/**初始化pose**/
curr_pose.reset(new geometry_msgs::PoseStamped());
curr_pose->pose.position.x = private_nh.param<float>("init_x", 0.0f);
curr_pose->pose.position.y = private_nh.param<float>("init_y", 0.0f);
curr_pose->pose.position.z = 0.0f;
/**加载全局地图并发布一次**/ // maybe add voxelgrid down sample
full_map.reset(new pcl::PointCloud<pcl::PointXYZI>());
pcl::io::loadPCDFile(globalmap_pcd, *full_map); //full_map指向全局地图
/** 地图下采样 **/
boost::shared_ptr <pcl::VoxelGrid<pcl::PointXYZI>> voxelgrid(new pcl::VoxelGrid<pcl::PointXYZI>());
voxelgrid->setLeafSize(downsample_resolution, downsample_resolution, downsample_resolution);
voxelgrid->setInputCloud(full_map);
pcl::PointCloud<pcl::PointXYZI>::Ptr filtered(new pcl::PointCloud<pcl::PointXYZI>());
voxelgrid->filter(*filtered);
full_map = filtered;
int points_num = 0;
int grid_num =full_map.size();
for (int i = 0; i < grid_num; i++)
{
if (full_map[i].cloud.points.size() > 0)
{
pcl::io::savePCDFileBinary(full_map[i].filename, full_map[i].cloud);
std::cout << "Wrote " << full_map[i].cloud.points.size() << " points to "
<< full_map[i].filename << "." << std::endl;
points_num += full_map[i].cloud.points.size();
}
}
write_csv(grids);
std::cout << "Total points num: " << points_num << " points." << std::endl;
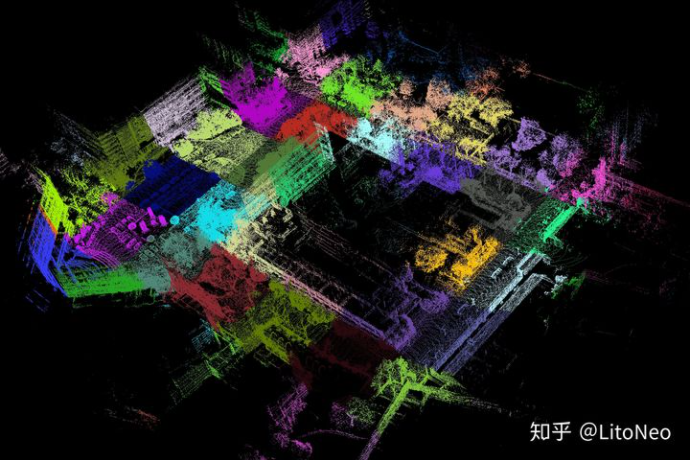
2. PCD地图分割
这里的相关代码作者LitoNeo已经开源。这部分主要思路是去掉z轴,仅对平面x、y方向上的点云按自定义的grid size划分方形网格。在定位的时候根据当前的GPS位置,可实时加载所在区域的网格点云,大量減小內存占用。
点云地图网格划分是离线处理的过程,处理完成后,每一个网格PCD都按一定的格式命名,并且在csv文件中记录,方便后续按文件名加载。
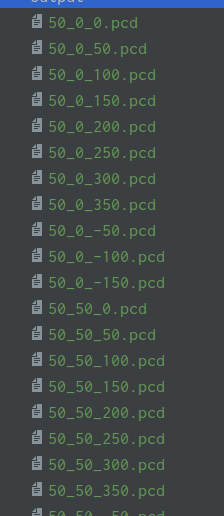
部分csv文件命名:
50_-100_-150.pcd,-100,-150,0,-50,-100,0
50_-50_-150.pcd,-50,-150,0,0,-100,0
50_0_-150.pcd,0,-150,0,50,-100,0
50_50_-150.pcd,50,-150,0,100,-100,0
50_-100_-100.pcd,-100,-100,0,-50,-50,0
50_-50_-100.pcd,-50,-100,0,0,-50,0
50_0_-100.pcd,0,-100,0,50,-50,0
50_50_-100.pcd,50,-100,0,100,-50,0
50_100_-100.pcd,100,-100,0,150,-50,0
50_-100_-50.pcd,-100,-50,0,-50,0,0
50_-50_-50.pcd,-50,-50,0,0,0,0
50_0_-50.pcd,0,-50,0,50,0,0
50_50_-50.pcd,50,-50,0,100,0,0
50_100_-50.pcd,100,-50,0,150,0,0
50_150_-50.pcd,150,-50,0,200,0,0
50_-150_0.pcd,-150,0,0,-100,50,0
50_-100_0.pcd,-100,0,0,-50,50,0
自定义结构体
struct pcd_xyz_grid
{
std::string filename; //网格PCD文件名
std::string name;
int grid_id; //网格编号
int grid_id_x; //行号
int grid_id_y; //列号
int lower_bound_x; //x_min
int lower_bound_y; //y_min
int upper_bound_x; //x_max
int upper_bound_y; //y_max
pcl::PointCloud<pcl::PointXYZ> cloud;
};
具体分割代码实现
/** 加载原始点云地图 **/
PointCloud map;
PointCloud tmp;
for (int i = 0; i < files.size(); i++)
{
if (pcl::io::loadPCDFile<Point>(files[i], tmp) == -1)
{
std::cout << "Failed to load " << files[i] << "." << std::endl;
}
map += tmp;
std::cout << "Finished to load " << files[i] << "." << std::endl;
}
std::cout << "Finished to load all PCDs: " << map.size() << " points."
/** 考虑对整个点云地图文件的点在xy方向的最大最小值,并设定网格划分规则 **/
double min_x = 10000000000.0;
double max_x = -10000000000.0;
double min_y = 10000000000.0;
double max_y = -10000000000.0;
for (PointCloud::const_iterator p = map.begin(); p != map.end(); p++)
{
if (p->x < min_x)
{
min_x = p->x;
}
if (p->x > max_x)
{
max_x = p->x;
}
if (p->y < min_y)
{
min_y = p->y;
}
if (p->y > max_y)
{
max_y = p->y;
}
}
/** 设定的grid_size对网格进行划分 **/
int div_x = (max_x_b - min_x_b) / grid_size;
int div_y = (max_y_b - min_y_b) / grid_size;
int grid_num = div_x * div_y;
/** 边界网格的xy方向上的坐标 **/
int min_x_b = grid_size * static_cast<int>(floor(min_x / grid_size));
int max_x_b = grid_size * static_cast<int>(floor(max_x / grid_size) + 1);
int min_y_b = grid_size * static_cast<int>(floor(min_y / grid_size));
int max_y_b = grid_size * static_cast<int>(floor(max_y / grid_size) + 1);
/**重新按网格序号组织点云 **/
for (PointCloud::const_iterator p = map.begin(); p != map.end(); p++)
{
int idx = static_cast<int>(floor((p->x - static_cast<float>(min_x_b)) / grid_size));
int idy = static_cast<int>(floor((p->y - static_cast<float>(min_y_b)) / grid_size));
int id = idy * div_x + idx;
const Point &tmp = *p;
grids[id].cloud.points.push_back(tmp);
}
/**一定格式定义文件名并保存 **/
std::vector<pcd_xyz_grid> grids(grid_num);
for (int y = 0; y < div_y; y++)
{
for (int x = 0; x < div_x; x++)
{
int id = div_x * y + x;
grids[id].grid_id = id; //序号
grids[id].grid_id_x = x; //行号
grids[id].grid_id_y = y; //列号
grids[id].lower_bound_x = min_x_b + grid_size * x; //方格的四个顶点
grids[id].lower_bound_y = min_y_b + grid_size * y;
grids[id].upper_bound_x = min_x_b + grid_size * (x + 1);
grids[id].upper_bound_y = min_y_b + grid_size * (y + 1);
grids[id].filename = OUT_DIR + std::to_string(grid_size) + "_" +
std::to_string(grids[id].lower_bound_x) + "_" +
std::to_string(grids[id].lower_bound_y) + ".pcd";
grids[id].name = std::to_string(grid_size) + "_" +
std::to_string(grids[id].lower_bound_x) + "_" +
std::to_string(grids[id].lower_bound_y) + ".pcd";
}
}
int points_num = 0;
for (int i = 0; i < grid_num; i++)
{
if (grids[i].cloud.points.size() > 0)
{
pcl::io::savePCDFileBinary(grids[i].filename, grids[i].cloud);
std::cout << "Wrote " << grids[i].cloud.points.size() << " points to "
<< grids[i].filename << "." << std::endl;
points_num += grids[i].cloud.points.size();
}
}
write_csv(grids);
std::cout << "Total points num: " << points_num << " points." << std::endl;
void write_csv(std::vector<pcd_xyz_grid> &grids)
{
std::string whole_file_name = OUT_DIR + FILE_NAME;
std::ofstream ofs(whole_file_name.c_str());
int grid_num = grids.size();
for (int i = 0; i < grid_num; i++)
{
if (grids[i].cloud.points.size() > 0)
{
ofs << grids[i].name
<< "," << grids[i].lower_bound_x
<< "," << grids[i].lower_bound_y
<< "," << 0.0
<< "," << grids[i].upper_bound_x
<< "," << grids[i].upper_bound_y
<< "," << 0.0 << std::endl;
}
}
}
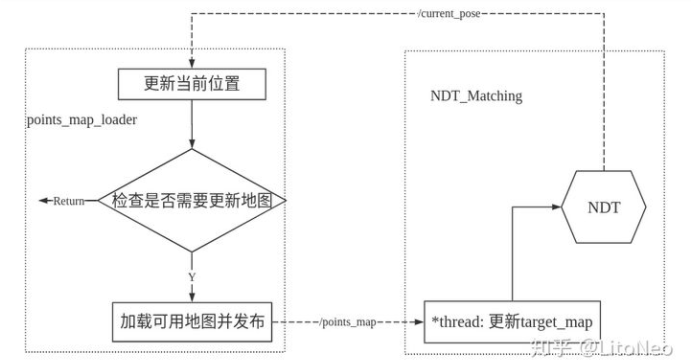
3.动态地图加载
/**读网格点云地图,并记录文件名**/
constexpr double MARGIN_UNIT = 100; // meter
gps_tools_.lla_origin_ << origin_latitude, origin_longitude, origin_altitude;//地图起点,后续lla转xyz
if (grid_size == "noupdate") //是否动态更新
margin = -1;
else if (grid_size == "1x1")
margin = 0;
else if (grid_size == "3x3")
margin = MARGIN_UNIT * 1;
else if (grid_size == "5x5")
margin = MARGIN_UNIT * 2;
else if (grid_size == "7x7")
margin = MARGIN_UNIT * 3;
else if (grid_size == "9x9")
margin = MARGIN_UNIT * 4;
else {
std::cout << "grid_size 有误..." << std::endl;
return EXIT_FAILURE;
}
std::string front_path;
getAllFiles(area_directory, pcd_paths); //获取pcd文件
if (pcd_paths.size() == 0) {
return EXIT_FAILURE;
}
int pos = pcd_paths[0].find_last_of('/');//获取路径前缀
std::string path_name(pcd_paths[0].substr(0, pos + 1));
front_path = path_name;
if (margin < 0) {
can_download = false; //不在线下载
} else {
can_download = false; //分块更新
for (const std::string &path : pcd_paths) {
int pos = path.find_last_of('/');
std::string file_name(path.substr(pos + 1));
pcd_names.push_back(file_name);
}
}
/**校验csv文件中读取到的pcd文件是否存在**/
string arealist_path = "*****";//csv 路径
if (margin < 0) {
int err = 0;
publish_pcd(create_pcd(pcd_paths, &err), &err); //不分块
} else {
std::cout << "can_download... " << std::endl;
n.param<int>("update_rate", update_rate, DEFAULT_UPDATE_RATE);
fallback_rate = update_rate * 2;
gnss_sub = n.subscribe("pos", 5, publish_gnss_pcd); //有更新
if (can_download) {
AreaList areas = read_arealist(arealist_path); //读取csv记录的pcd文件
for (const Area &area : areas) {
for (const std::string &path : pcd_names) {
if (path == area.path) {
// 将csv记录的并且文件夹中有的pcd文件,放进downloaded_areas中
cache_arealist(area, downloaded_areas);
}
}
}
gnss_time = current_time = ros::Time::now();//当前时间,以gnss为准
}
/**读取csv文件,并查找**/
struct Area {
std::string path;
double x_min;
double y_min;
double z_min;
double x_max;
double y_max;
double z_max;
};
typedef std::vector<Area> AreaList;
typedef std::vector<std::vector<std::string>> Tbl;
AreaList read_arealist(const std::string &path) {
Tbl tbl = read_csv(path); //逐行读取
AreaList ret; //用定义的area重新封装
for (const std::vector<std::string> &cols : tbl) {
Area area;
area.path = cols[0];
area.x_min = std::stod(cols[1]);
area.y_min = std::stod(cols[2]);
area.z_min = std::stod(cols[3]);
area.x_max = std::stod(cols[4]);
area.y_max = std::stod(cols[5]);
area.z_max = std::stod(cols[6]);
ret.push_back(area);
}
return ret;
}
Tbl read_csv(const std::string &path) {//逐行读取csv文件
std::ifstream ifs(path.c_str());
std::string line;
Tbl ret;
while (std::getline(ifs, line)) {
std::istringstream iss(line);
std::string col;
std::vector<std::string> cols;
while (std::getline(iss, col, ','))
cols.push_back(col);
ret.push_back(cols);
}
return ret;
}
void cache_arealist(const Area &area, AreaList &areas) {
for (const Area &a : areas) {//没有的话加入
if (a.path == area.path)
return;
}
areas.push_back(area);
}
gps位置更新,进行坐标转换
void publish_gnss_pcd(const sensor_msgs::NavSatFixPtr &gps_msg) {
if (std::isnan(gps_msg->latitude + gps_msg->longitude + gps_msg->altitude)) {
ROS_INFO("GPS LLA NAN...");
return;
}
if (gps_msg->status.status == 4 || gps_msg->status.status == 5 || gps_msg->status.status == 1 ||
gps_msg->status.status == 2) {
ros::Time now = ros::Time::now();//注意更新频率是否符合预定要求
if (((now - current_time).toSec() * 1000) < fallback_rate)
return;
if (((now - gnss_time).toSec() * 1000) < update_rate)
return;
gnss_time = now;
Eigen::Vector3d lla = gps_tools_.GpsMsg2Eigen(*gps_msg);
Eigen::Vector3d ecef = gps_tools_.LLA2ECEF(lla);
Eigen::Vector3d enu = gps_tools_.ECEF2ENU(ecef);
gps_tools_.gps_pos_ = enu;
gps_pos_ = enu;
geometry_msgs::Point pose;
pose.x = gps_pos_(0);
pose.y = gps_pos_(1);
pose.z = gps_pos_(2);
std::cout << "area lla : " << gps_pos_(0) << ", " << gps_pos_(1) << ", " << gps_pos_(2)<< std::endl;
publish_pcd(create_pcd(pose)); //pub当前的网格
}
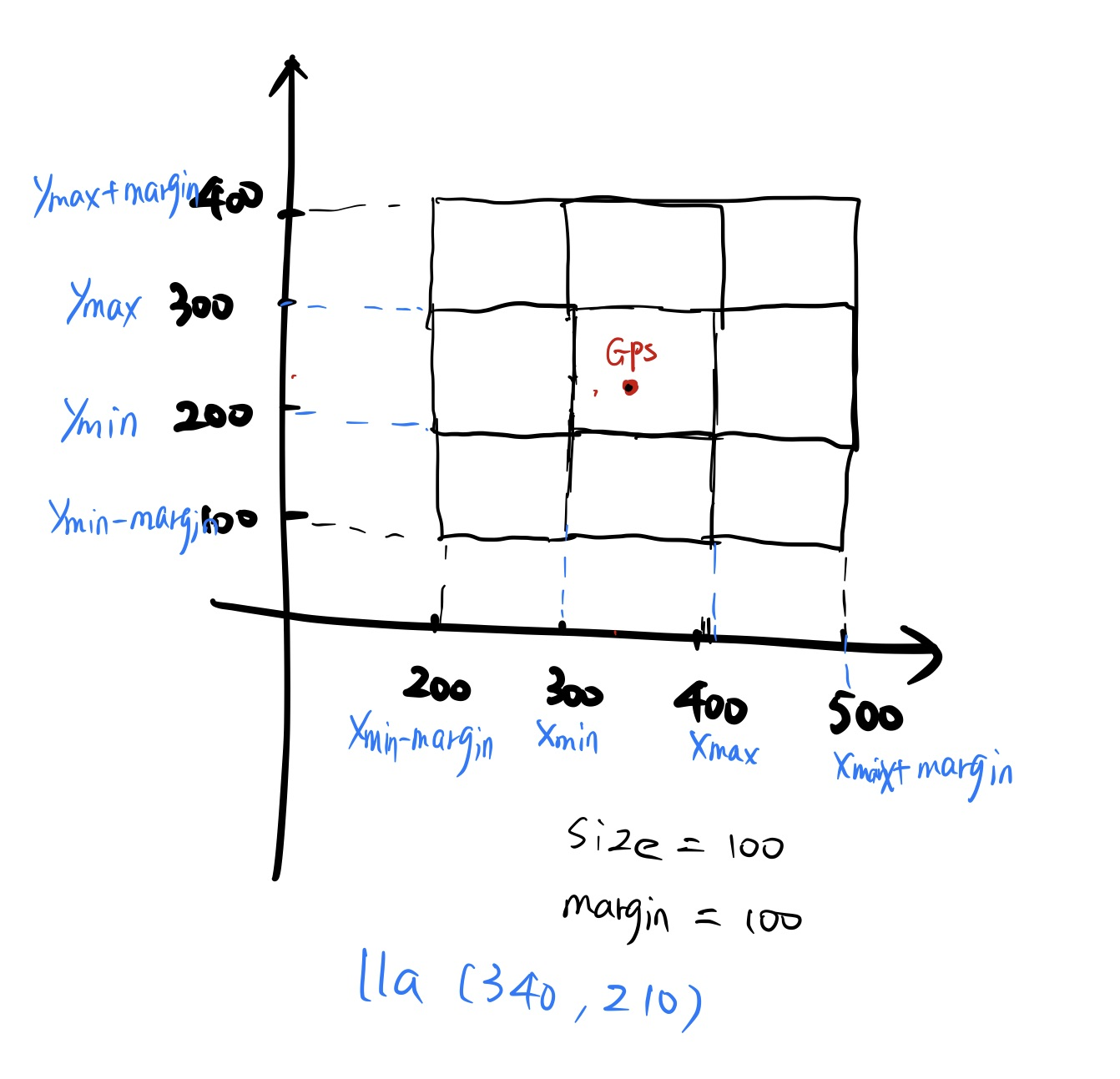
根据位置去查询相应的网格地图
sensor_msgs::PointCloud2 create_pcd(const geometry_msgs::Point &p) {
sensor_msgs::PointCloud2 pcd, part;
std::unique_lock<std::mutex> lock(downloaded_areas_mtx);
for (const Area &area : downloaded_areas) {//遍历一下
if (is_in_area(p.x, p.y, area, margin)) { //判断当前位置在哪些网格里面
std::string pcd_name = front_path + area.path;//实际的PCD文件路径
if (pcd.width == 0)
pcl::io::loadPCDFile(pcd_name.c_str(), pcd);
else {
std::cout << "success load: " << area.path << std::endl;
pcl::io::loadPCDFile(pcd_name.c_str(), pcd);
pcd.width += part.width; //所有符合条件的网格全pub出来
pcd.row_step += part.row_step;
pcd.data.insert(pcd.data.end(), part.data.begin(), part.data.end());
}
}
}
return pcd;
}
bool is_in_area(double x, double y, const Area &area, double m) {
return ((area.x_min - m) <= x && x <= (area.x_max + m) && (area.y_min - m) <= y && y <= (area.y_max + m));
}
…详情请参照古月居

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)