深度学习之从Python到C++

0. 前言
最近尝试着去在SLAM当中使用深度学习,而目前的SLAM基本上是基于C++的,而现有的Pytorch、Tensorflow这类框架均是基于python的。所以如何将Python这类脚本文件来在C++这类可执行文件中运行,这是非常有必要去研究的,而网络上虽然存在有例子,但是很多都比较杂乱,所以本篇文章将网络上常用的方法进行整理,以供后面初学者有迹可循
1. 模型认识
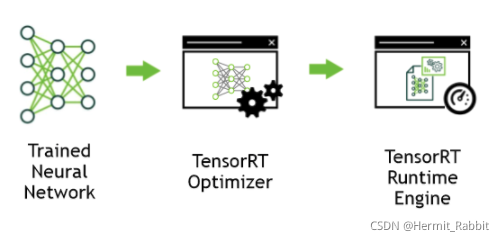
我们知道,目前基于C++存在两种方式,一种是通过Opencv加载训练好的模型和网络,而另一种则是通过TensorRT来进行C++的深度学习开发,TensorRT是Nvidia官方给的C++推理加速工具,如同OpenVINO之于Intel。支持诸多的AI框架,如Tensorflow,Pytorch,Caffe,MXNet等。
对于这类C++程序而言,其最重要是更加通用,同时支持模型自身运算的加速。

2. Opencv
实验流程为:Pytorch -> Onnx -> Opencv。即首先将Pytorch模型转换为Onnx模型,然后通过Opencv解析Onnx模型。
首先,参考pytorch官方文档中训练一个分类器的代码,训练一个简单的图像分类器。代码如下:
import torch.optim as optim
import torch.nn.functional as F
import torch.nn as nn
import numpy as np
import matplotlib.pyplot as plt
import torch
import torch.onnx
import torchvision
import torchvision.transforms as transforms
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4,
shuffle=True, num_workers=0)
testset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4,
shuffle=False, num_workers=0)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
# functions to show an image
def imshow(img):
img = img / 2 + 0.5 # unnormalize
npimg = img.numpy()
plt.imshow(np.transpose(npimg, (1, 2, 0)))
plt.show()
# get some random training images
dataiter = iter(trainloader)
images, labels = dataiter.next()
print(images.shape)
# show images
imshow(torchvision.utils.make_grid(images))
# print labels
print(' '.join('%5s' % classes[labels[j]] for j in range(4)))
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 3)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 12, 3)
self.conv3 = nn.Conv2d(12, 32, 3)
self.fc1 = nn.Linear(32 * 4 * 4, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = F.relu(self.conv3(x))
x = x.view(-1, 32 * 4 * 4)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
net = Net()
net.to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
for epoch in range(100): # loop over the dataset multiple times
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# get the inputs; data is a list of [inputs, labels]
inputs, labels = data[0].to(device), data[1].to(device)
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# print statistics
running_loss += loss.item()
if i % 2000 == 1999: # print every 2000 mini-batches
print(outputs)
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 2000))
running_loss = 0.0
print('Finished Training')
上述代码相对于官方文档的代码,仅仅是增加了卷积层和利用GPU进行训练,且输出结果未经处理,只是简单输出各个类别的概率值。
训练完网络之后,将网络保存,代码如下:
# 保存网络结构和参数
# 方法1:保存网络结构和参数
PATH = './cifar_net.pth'
torch.save(net, PATH)
# 方法2:保存网络参数
PATH = './cifar_net.pth'
torch.save(net.state_dict(), PATH)
# 方法3:导出网络到ONNX
dummy_input = torch.randn(1, 3, 32, 32).to(device)
torch.onnx.export(net, dummy_input, "torch.onnx")
# 方法4:保存网络位TORCHSCRIPT
dummy_input = torch.randn(1, 3, 32, 32).to(device)
traced_cell = torch.jit.trace(net, dummy_input)
traced_cell.save("tests.pth")
并通过方法3将保存好的ONNX模型输入到opencv中,并通过opencv提供的Net cv::dnn::readNetFromONNX ( const String & onnxFile )函数读取保存好的网络。代码实现如下:
//测试opencv加载pytorch模型
#include <opencv2/dnn.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
using namespace cv;
using namespace cv::dnn;
#include <fstream>
#include <iostream>
#include <cstdlib>
using namespace std;
int main()
{
String modelFile = "./torch.onnx";
String imageFile = "./dog.jpg";
dnn::Net net = cv::dnn::readNetFromONNX(modelFile); //读取网络和参数
Mat image = imread(imageFile); // 读取测试图片
cv::cvtColor(image, image, cv::COLOR_BGR2RGB);
Mat inputBolb = blobFromImage(image, 0.00390625f, Size(32, 32), Scalar(), false, false); //将图像转化为正确输入格式
net.setInput(inputBolb); //输入图像
Mat result = net.forward(); //前向计算
cout << result << endl;
}
3. TensorRT
实验流程为:Pytorch -> Onnx -> TensorRT 或者Pytorch-> TensorRT。创建TensorRT引擎及进行前向推理,下面将分成两节来描述不同的方法。
…详情请参照古月居

- 点赞
- 收藏
- 关注作者
评论(0)