基于ROS2的POP和OOP编程

【摘要】 0. 前言在使用ROS时候,我们常常感叹ROS的好用,但是在ROS开发方面,从前的我常常会拘泥于教程上的POP的开发方式,这样让我在开发相对大型的机器人程序时就倍感不适。而在19年开始我尝试着在ROS1中使用OOP的形式编程。但是我们知道ROS2和ROS1存在着差异性,所以我们不能直接套用ROS1的编程习惯去实现ROS2的编程。而ROS2是基于DDS开发的去中心化通信,使得ROS2的是实行...
0. 前言
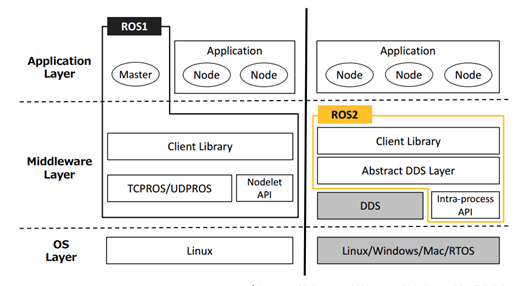
在使用ROS时候,我们常常感叹ROS的好用,但是在ROS开发方面,从前的我常常会拘泥于教程上的POP的开发方式,这样让我在开发相对大型的机器人程序时就倍感不适。而在19年开始我尝试着在ROS1中使用OOP的形式编程。但是我们知道ROS2和ROS1存在着差异性,所以我们不能直接套用ROS1的编程习惯去实现ROS2的编程。而ROS2是基于DDS开发的去中心化通信,使得ROS2的是实行、可靠性和连续性上都有了增强。这也让ROS2能够适应更庞大的多机器人开发。为此本文针对ROS2去给出一套POP和OOP编程以供各位对比。这里也感谢fishros对ROS2开源社区的贡献。
#include <ros/ros.h>
#include <std_msgs/UInt8.h>
class TopicPublish
{
public:
TopicPublish(std::string pub_name);
void publish(uint8_t dat);
private:
ros::NodeHandle nh;
ros::Publisher topic_pub;
};
TopicPublish::TopicPublish(std::string pub_name)
{
topic_pub = nh.advertise<std_msgs::UInt8>(pub_name, 10);
}
void TopicPublish::publish(uint8_t dat)
{
std_msgs::UInt8 msgs;
msgs.data = dat;
topic_pub.publish(msgs);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "topic_publish_node");
TopicPublish mypub("/profect");
ros::Rate loop(10);
while(ros::ok())
{
mypub.publish(8);
ros::spinOnce();
loop.sleep();
}
return 0;
}
1.POP和OOP概念
一、面向过程编程:(POP:Procedure Oriented Programming)
面向过程编程是以功能为中心来进行思考和组织的一种编程方法,它强调的是功能(即系统的数据被加工和处理的过程),在程序设计中主要以函数或者过程为程序的基本组织方式,系统功能是由一组相关的过程和函数序列构成。
从思维上来讲,面向过程更强调细节,忽视了整体性和边界性。
典型代表是 C/C++的结构体
-
优点
- 流程化编程任务明确,在开发之前基本考虑了实现方式和最终结果;
- 开发效率高,代码的短小精悍,善于结合数据结构来开发高效率的程序;
- 流程明确,具体步骤清楚,便于节点分析。
-
缺点
- 需要深入的思考,耗费精力;
- 代码重用性低,不易扩展,维护起来难度大;
- 对复杂业务,面向过程的模块化难度较高,耦合度比较高。
二、面向对象编程:(OOP:Object Oriented Programming)
面向对象编程以对象为中心,面向对象作为一种新型的程序设计方法,其是以对象模型为基础进行的抽象过程,并在应用过程中形成了描述自己的抽象概念定义,包括对象、类、封装、继承以及多态等。
面向对象是一种编程范式,满足面向对象编程的语言,一般会提供类、封装、继承等语法和概念来辅助我们进行面向对象编程。
- 优点
- 结构清晰,注重 对象和职责,不同的对象承担不同的职责;
- 封装性,将事务高度抽象,便于流程中的行为分析、操作;
- 容易扩展,代码重用率高,可继承,可覆盖;
- 实现简单,可有效地减少程序的维护工作量。
- 缺点
- 面向对象在面向过程的基础上高度抽象,从而和代码底层的直接交互非常少,从而不适合底层开发和游戏开发,甚至是多媒体开发;
- 复杂性,对于事务开发而言,事务本身是面向过程的,过度的封装导致事务本身的复杂性提高。
2. POP与OOP
基于POP的ROS2
#include "rclcpp/rclcpp.hpp"
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
/*产生一个HERMIT的节点*/
auto node = std::make_shared<rclcpp::Node>("HERMIT");
// 打印一句自我介绍
RCLCPP_INFO(node->get_logger(), "这里是HERMIT.");
/* 运行节点,并检测退出信号*/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
基于OOP的ROS2
#include "rclcpp/rclcpp.hpp"
/*
创建一个类节点,名字叫做HERMITNode,继承自Node.
*/
class HERMITNode: public rclcpp::Node
{
public:
// 构造函数,有一个参数为节点名称
HERMITNode(std::string name) : Node(name)
{
// 打印一句自我介绍
RCLCPP_INFO(this->get_logger(), "这里是%s.",name.c_str());
}
private:
};
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
/*产生一个HERMIT的节点*/
auto node = std::make_shared<HERMITNode>("HERMIT");
/* 运行节点,并检测退出信号*/
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
…详情请参照古月居

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)