ubuntu20.04 实测 机械式激光雷达与相机联合标定

安装功能包
实测 ubuntu20.04 本地安装
安装步骤如下:
下载功能包
git clone -c http.sslverify=false https://gitlab.acfr.usyd.edu.au/its/cam_lidar_calibration.git
成功提示:
正克隆到 ‘cam_lidar_calibration’…
remote: Enumerating objects: 762, done.
remote: Total 762 (delta 0), reused 0 (delta 0), pack-reused 762
接收对象中: 100% (762/762), 76.65 MiB | 449.00 KiB/s, 完成.
处理 delta 中: 100% (340/340), 完成.
安装依赖
sudo apt update && sudo apt-get install -y ros-noetic-pcl-conversions ros-noetic-pcl-ros ros-noetic-tf2-sensor-msgs
成功提示
下列【新】软件包将被安装:
ros-noetic-tf2-sensor-msgs
升级了 0 个软件包,新安装了 1 个软件包,要卸载 0 个软件包,有 142 个软件包未被升级。
需要下载 9,400 B 的归档。
解压缩后会消耗 52.2 kB 的额外空间。
获取:1 http://packages.ros.org/ros/ubuntu focal/main amd64 ros-noetic-tf2-sensor-msgs amd64 0.7.5-1focal.20220107.002056 [9,400 B]
已下载 9,400 B,耗时 1秒 (12.6 kB/s)
正在选中未选择的软件包 ros-noetic-tf2-sensor-msgs。
(正在读取数据库 … 系统当前共安装有 277707 个文件和目录。)
准备解压 …/ros-noetic-tf2-sensor-msgs_0.7.5-1focal.20220107.002056_amd64.deb …
正在解压 ros-noetic-tf2-sensor-msgs (0.7.5-1focal.20220107.002056) …
正在设置 ros-noetic-tf2-sensor-msgs (0.7.5-1focal.20220107.002056) …
安装pandas 和 scipy
pip install pandas scipy
将功能包拷入ros的工作空间
然后编译
catkin_make
不出意外会报错误
In file included from /home/jone/jone_ws/src/cam_lidar_calibration/src/optimiser.cpp:3:
/home/jone/jone_ws/src/cam_lidar_calibration/include/cam_lidar_calibration/optimiser.h:10:10: fatal error: opencv/cv.hpp: 没有那个文件或目录
10 | #include <opencv/cv.hpp>
| ^~~~~~~~~~~~~~~
compilation terminated.
make[2]: *** [cam_lidar_calibration/CMakeFiles/cam_lidar_calibration.dir/build.make:115:cam_lidar_calibration/CMakeFiles/cam_lidar_calibration.dir/src/optimiser.cpp.o] 错误 1
make[2]: *** 正在等待未完成的任务…
仍然是 ubuntu20.04 opencv 的 版本问题
错位解决办法:
打开include文件夹下的 optimise.h文件
将第10行
#include <opencv/cv.hpp>
改为
#include <opencv2/opencv.hpp>
再次编译报错:
error: ‘CV_REDUCE_SUM’ was not declared in this scope
427 | cv::reduce(trans_diff, summed_diff, 1, CV_REDUCE_SUM, CV_64F);
| ^~~~~~~~~~~~~
make[2]: *** [cam_lidar_calibration/CMakeFiles/cam_lidar_calibration.dir/build.make:115:cam_lidar_calibration/CMakeFiles/cam_lidar_calibration.dir/src/optimiser.cpp.o] 错误 1
make[2]: *** 正在等待未完成的任务…
CV_REDUCE_SUM 这个变量没定义,opencv3到opencv4切换带来的错误
在 optimise.h文件中加入下面的包含文件
#include<opencv2/core/core_c.h>
编译通过
功能包测试
作者在功能包中放了测试数据,提供测试
roslaunch cam_lidar_calibration run_optimiser.launch import_samples:=true
该程序根据cam_lidar_calibration/data/vlp/文件夹下的pose.csv标定,在该文件夹生成一个标定camera和lidar外参文件
终端输出
[ INFO] [1662433388.628563347]: ====== START CALIBRATION ======
Computing calibration results (roll,pitch,yaw,x,y,z) for each of the 50 lowest voq sets
1/50 | voq: 20.059 | -1.684, 0.002,-1.485, 0.068,-0.017,-0.223 | t: 0.853s
2/50 | voq: 21.132 | -1.691,-0.023,-1.498, 0.059, 0.017,-0.196 | t: 0.824s
3/50 | voq: 21.213 | -1.671,-0.004,-1.490, 0.065,-0.005,-0.253 | t: 1.500s
4/50 | voq: 21.997 | -1.695,-0.022,-1.491, 0.059,-0.001,-0.198 | t: 1.350s
5/50 | voq: 22.191 | -1.699,-0.026,-1.496, 0.059, 0.014,-0.187 | t: 1.278s
6/50 | voq: 22.202 | -1.695,-0.019,-1.492, 0.060, 0.001,-0.191 | t: 0.802s
7/50 | voq: 22.354 | -1.680,-0.007,-1.488, 0.065,-0.012,-0.238 | t: 4.565s
8/50 | voq: 22.689 | -1.685, 0.005,-1.483, 0.068,-0.021,-0.219 | t: 1.509s
9/50 | voq: 22.703 | -1.715,-0.018,-1.489, 0.059,-0.007,-0.147 | t: 1.560s
10/50 | voq: 22.710 | -1.703,-0.018,-1.492, 0.058, 0.003,-0.172 | t: 0.833s
11/50 | voq: 23.094 | -1.697,-0.031,-1.494, 0.063, 0.006,-0.192 | t: 0.879s
每一行则是迭代后的结果
终端输出这个的时候
[ INFO] [1662433466.965540013]: ====== END ======
表示迭代完了
然后获取评估校准结果
终端输出
Calibration params (roll,pitch,yaw,x,y,z): -1.6963,-0.0234,-1.4927,0.0622,0.0033,-0.1908
Mean reprojection error across 40 samples
Error (pix) = 4.560 pix, stdev = 2.928
Error (mm) = 9.006 mm , stdev = 4.697
[ INFO] [1662433590.250502423]: Projecting points onto image for pose #16
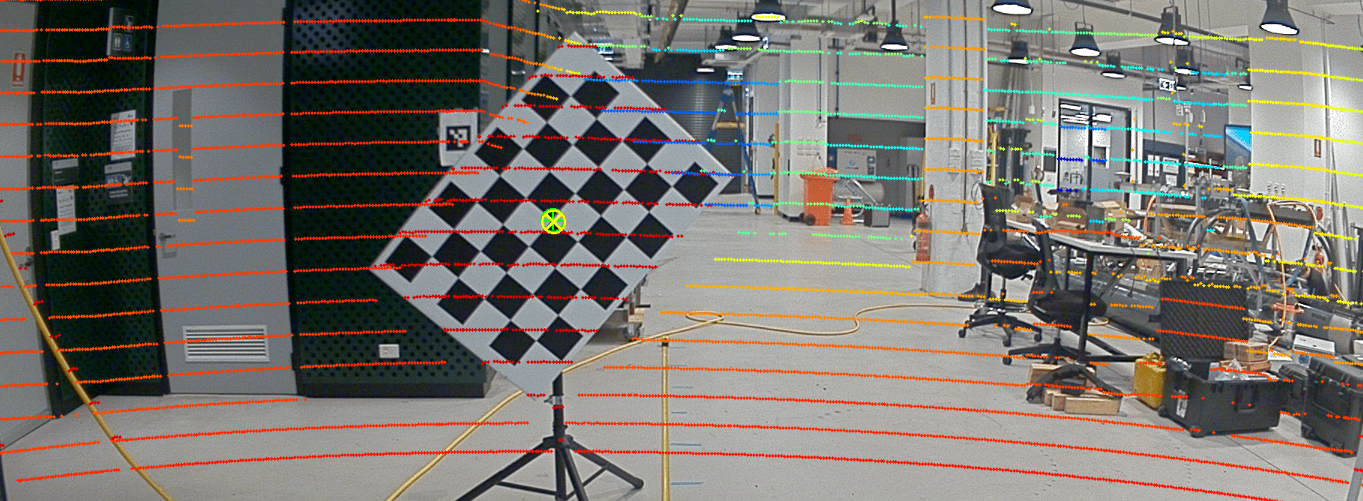
生成一个雷达投射到图片上的图片
利用功能包标定自己的激光雷达和相机
设置参数
主要修改cam_lidar_calibration/cfg/camera_info.yaml和params.yaml
cam_lidar_calibration/cfg/camera_info.yaml 文件设置如下:
distortion_model: "non-fisheye"
width: 1440
height: 1080
D: [-0.106460,0.103712,-0.000019,0.003994]
K: [1213.343583,0.0,744.150520,0.0,1217.236982,586.154363,0.0,0.0,1]
设置是:
- 否为鱼眼相机
- 像素宽和高
- 内参矩阵
- 失真系数
相机的内参标定方法可以参考这篇博客:
params.yaml 文件设置如下:
# Topics
camera_topic: "/camera_array/cam0/image_raw"
camera_info: "/camera_array/cam0/camera_info"
lidar_topic: "/velodyne_points"
分别是:
- 相机消息名称
- 相机信息
- 激光雷达消息名称
feature_extraction:
x_min: -10.0
x_max: 10.0
y_min: -8.0
y_max: 8.0
z_min: -5.0
z_max: 5.0
点云的选取范围,用默认的就是,之后可以在线调
chessboard:
pattern_size:
height: 14
width: 9
square_length: 11
board_dimension:
width: 390
height: 596
translation_error:
x: 0
y: 0
标定棋盘的相关参数
和背板的相关参数
距离都是mm为单位
启动相机和激光雷达
启动相机
roslaunch spinnaker_sdk_camera_driver acquisition.launch
启动激光雷达
roslaunch velodyne_pointcloud VLP16_points.launch
启动功能包
开启程序采集表定数据,运行命令:
roslaunch cam_lidar_calibration run_optimiser.launch import_samples:=false
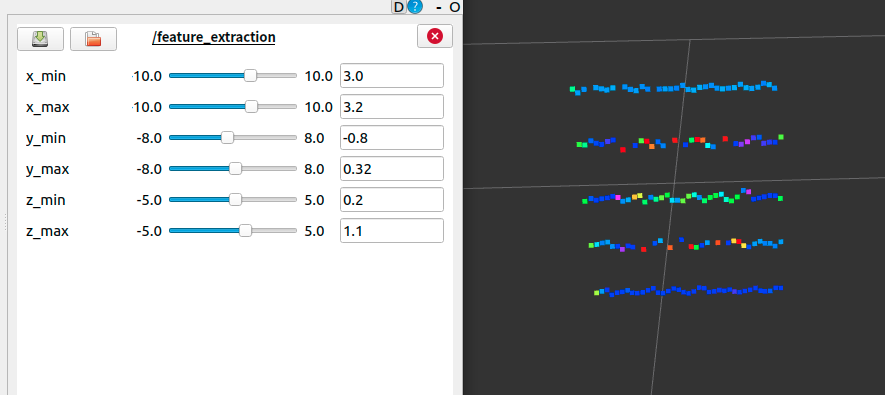
会出现RVIZ和rqt_reconfigure窗口,在RVIZ中panels->display修改相机的话题和激光雷达点云对应的frame_id。
调整rqt_reconfigure /feature_extraction的xyz最大值最小值以使得标定板的点云和周围环境分开,使其仅显示棋盘。如果棋盘没有完全隔离,可能会影响棋盘的平面拟合,还会导致棋盘尺寸误差较大。下图是过滤点云前后效果:
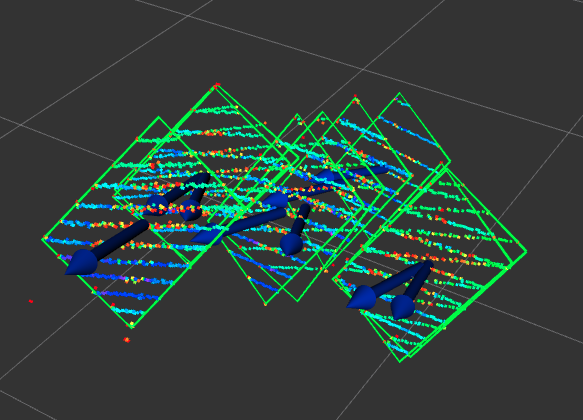
在过滤周围环境点云后,在rviz中点击Capture sample采集样本,会出线绿色框代表根据点云拟合出来的标定板平面
终端会打印出来添加的样本信息
— Sample 1 —
Measured board has: dimensions = 390x596 mm; area = 0.23244 m^2
Distance = 2.11 m
Board angles = 94.19,91.96,93.95,92.20 degrees
Board area = 0.25006 m^2 (+0.01762 m^2)
Board avg height = 614.17mm (+18.17mm)
Board avg width = 407.12mm (+17.12mm)
Board dim = 396.39,612.74,615.60,417.86 mm
Board dim error = 70.59
— Sample 9 —
Measured board has: dimensions = 390x596 mm; area = 0.23244 m^2
Distance = 2.59 m
Board angles = 92.69,98.29,98.38,92.60 degrees
Board area = 0.25282 m^2 (+0.02038 m^2)
Board avg height = 612.57mm (+16.57mm)
Board avg width = 412.68mm (+22.68mm)
Board dim = 411.17,592.04,633.10,414.18 mm
Board dim error = 86.41
最好采集10个样本以上,再点击rviz中的optimise进行标定,在优化过程中将会在cam_lidar_calibration/data生成当前时间日期的文件夹,存放采集的图像、点云pcd、位姿,标定后camer和lidar外参文件。
终端输出开始校准:
[ INFO] [1662448387.086142265]: ====== START CALIBRATION ======
Computing calibration results (roll,pitch,yaw,x,y,z) for each of the 50 lowest voq sets
1/50 | voq: 162.919 | 3.423,-0.282,-1.383, 2.057,-0.200, 0.744 | t: 1.612s
2/50 | voq: 187.519 | 3.391,-0.343,-1.390, 2.016,-0.061, 0.742 | t: 2.103s
3/50 | voq: 190.635 | 3.473,-0.351,-1.391, 1.940,-0.083, 0.718 | t: 4.604s
4/50 | voq: 194.325 | -2.563,-0.339,-1.429, 1.772,-0.185, 0.633 | t: 2.882s
校准结束后输出:
47/50 | voq: 573.420 | -1.587, 0.027,-1.613, 1.085,-0.084, 0.015 | t: 5.416s
48/50 | voq: 587.555 | -1.571,-0.155,-1.533, 1.387,-0.441,-0.145 | t: 1.097s
49/50 | voq: 588.285 | -1.676, 0.170,-1.696, 1.422, 0.001,-0.045 | t: 1.726s
50/50 | voq: 593.720 | -1.609, 0.088,-1.660, 1.087,-0.244, 0.034 | t: 1.787s
Optimisation Completed in 123.578s
[ INFO] [1662448510.660340676]: ====== END ======
评估参数和重投影误差:
roslaunch cam_lidar_calibration assess_results.launch csv:="$(rospack find cam_lidar_calibration)/data/2022-09-06_14-48-42/calibration_2022-09-06_15-13-07.csv" visualise:=true
注意这里默认加载第16个图像,如果没有那么大的标定样本,要修改launch文件中的加载序列
出现重投影效果图像:
终端出现标定参数和重投影误差:

- 点赞
- 收藏
- 关注作者
评论(0)