ubuntu20.04 ROS 环境下使用 Flir Blackfly S 工业相机

Flir Blackfly 官网:网址
Spinnaker C++ API 网址
Flir Blackfly S USB3 产品介绍
Blackfly S 采用业内先进的冰块外形传感器。
具有强大功能,可以轻松生成所需的精确图像,并加速应用程序开发。
包括对图像捕获和相机预处理的自动和精确手动控制。
Blackfly S 提供GigE、USB3、套装和板级版本。
精确图像 索尼CMOS传感器中的选择包括:全局快门、偏振和高灵敏度BSI传感器。
实物图如下:

使用的型号为:BFS-U3-16S2C-CS
其主要参数如下:

安装 Spinnaker
Spinnaker SDK的下载地址:
地址
但是只能找到2.x版本的
Spinnaker2及以上,安装后不再系统include文件夹中添加头文件,影响驱动“”对文件的索引。
注意安装完毕后,文件是在 /opt 文件夹中
如果用 flir_adk_ethernet 功能包 怎会出现 找不到头文件的情况。 如果能找到 Spinnaker1.x 版本的,这个功能包则可以用。
安装Spinnaker 在下载的文件夹找到install_spinnaker.sh这个文件,然后在其路径下打开终端,输入
sudo sh install_spinnaker.sh
安装提示安装即可。
安装 spinnaker_sdk_camera_driver 功能包
由于安装的 2.x版本的 Spinnaker 所以 最好 选择 这个功能包 ,省去配置路径的很多麻烦。
该功能包对于 x86_64 的电脑 需要 安装如下依赖
- unwind-dev
- ros-noetic-cv-bridge
- ros-noetic-image-transport
通过如下指令安装 依赖
sudo apt install libunwind-dev ros-noetic-cv-bridge ros-noetic-image-transport
从github上下载功能包
git clone https://github.com/neufieldrobotics/spinnaker_camera_driver.git
放到ros的工作空间编译
catkin_make
好了,如果是 ubuntu 18.04 之前的版本应该没问题
但是我的是 ubuntu 20.04 版本的,编译报错了
提示 ,在 std_include.h 文件中找不到 cv.h文件
原因就是 ubuntu 20.04 的opencv版本是 v4的,版本不匹配造成的。
此时需要对功能包源码进行一定修改
打开 std_include.h 文件,删掉 第 9行
9 - #include <cv.h>
打开 capture.cpp 文件 ,修改 第 1000 行
if (LIVE_)namedWindow("Acquisition", CV_WINDOW_NORMAL | CV_WINDOW_KEEPRATIO);
if (LIVE_)namedWindow("Acquisition", WINDOW_NORMAL | WINDOW_KEEPRATIO);
将上面的改为下面的
修改 第 1049 行
int key = cvWaitKey(1);
int key = waitKey(1);
将上面的改为下面的
修改 第 1073 行
cvDestroyAllWindows();
destroyAllWindows();
将上面的改为下面的
修改 第 1101 行
cvDestroyAllWindows();
destroyAllWindows();
将上面的改为下面的
然后再编译即可成功!
增加USB3.0的带宽限制
默认的,在Linux系统中,USB-FS 仅有16MB的带宽对于所有的USB设备。对于高帧率相机来说这个带宽就太少了,并且如果相机的分辨率很高,或者同时接多个相机,那么都需要增大其带宽限制。
在安装 Spinnaker 的时候 会 自动的 设置 带宽。 如果想确定成功没有,可以打开 /etc/rc.local文件,如果没有这个文件,肯定没有设置成功。
有这个文件的话,打开,看最后有没有下面这句话:
sh -c 'echo 1000 > /sys/module/usbcore/parameters/usbfs_memory_mb'
如果有,那么设置应该成功了。还可以通过如下指令查看
cat /sys/module/usbcore/parameters/usbfs_memory_mb
设置成功,终端如下:

如果没有成功,可以执行
sudo sh configure_usbfs.sh
这个脚本。
也可以手动设置这个带宽,方法如下:
首先 添加 rc.local 文件,并附权
$ sudo touch /etc/rc.local
$ sudo chmod 744 /etc/rc.local
在最后添加下面这个句
sh -c 'echo 1000 > /sys/module/usbcore/parameters/usbfs_memory_mb'
然后保存,重启设备。用上面的检测方法检查下,失败的话用下面的
$ sudo sh -c 'echo 1000 > /sys/module/usbcore/parameters/usbfs_memory_mb'
如果用多个相机的话,那么可能要超过1000
硬件连接

修改相机id号
相机本身自己有一个8位的id号,在相机的下部。这个id号要填到 test_params.yaml 文件中
cam_ids:
master_cam:
改这两个值
启动驱动
roslaunch spinnaker_sdk_camera_driver acquisition.launch
然后可以查看当前 消息 名称
rostopic list
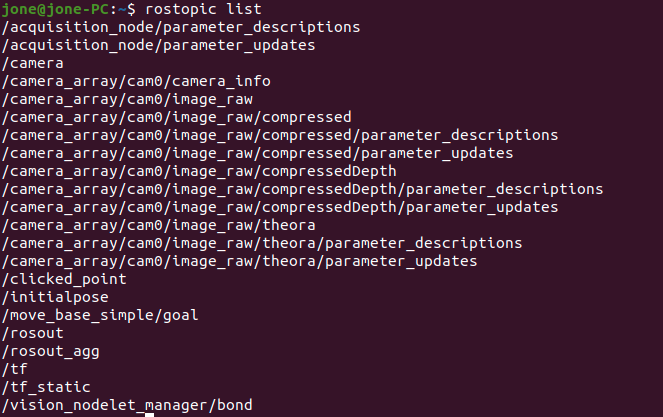
/camera_array/cam0/image_raw 就是图像的消息
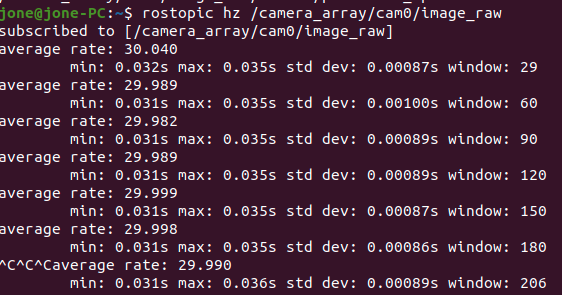
rostopic hz /camera_array/cam0/image_raw
可以查看其频率
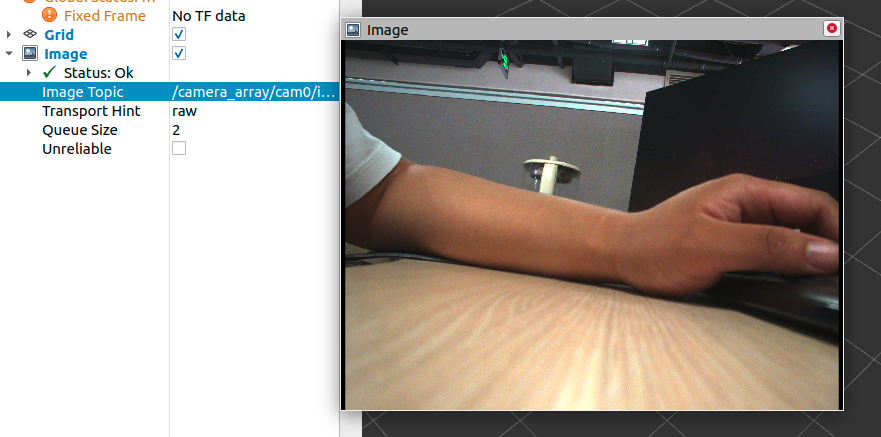
rviz查看图像
启动rviz
rviz
添加 image 功能菜单,然后Image Topic 选择/camera_array/cam0/image_raw
即可出现画面,如下:

- 点赞
- 收藏
- 关注作者
评论(0)