因子图优化及GTSAM中IMU预积分接口

因子图的功能
在slam的后端优化问题中,通常会通过⼀些传感器的观测,比如:
- 视觉特征点
- IMU预积分量
- Lidar面点和边缘点(角点)的约束
去构建一个优化问题,求解状态量(如位姿、速度等)。
这个时候存在一个问题:
当给这个系统新增⼀个约束时,就会重新建立所有的约束对状态量的优化问题进行求解。当优化模型增大时,显然进行一次优化的时间也会增加很多;一方面实时性遭遇了挑战,另一方面,很久之前的状态也没有继续更新的必要。
因子图可以解决这个问题:
为了解决这个问题,⼀种方式是使用滑动窗口来控制优化问题的规模,而滑动窗口需要处理好边缘化的问题;另一种方式,可以使用因子图的模型来解决这个问题。
因子图的内部实现:
Kaess等科研人员提出iSAM,即增量平滑和建图,使其可以自动增量处理大规模优化问题;具体来说,其内部使用一种基于概率的贝叶斯树,使得每次给因子图增加一个约束时,会根据贝叶斯树的连接关系,调整和当前结点“关系比较密切”的结点(概率比较大);这样既保障了优化问题的求解精度,也使得耗时不会随着优化问题的增大而增大。关于因子图优化理论可以参考iSAM,iSAM2相关论文。
因子图中的"边"和"顶点"
- 变量结点:类似g2O中的顶点或者ceres中的参数块,代表需要被优化的变量。(在slam问题中可以是:位姿、速度、IMU零偏这些变量)
- 因子结点:类似g2O中的边或者ceres中的cost function(代价函数),代表约束,如预积分约束、位姿先验约束、帧间位姿约束等
GTSAM关于IMU预积分相关接口
GTSAM库介绍
GTSAM全称是 Georgia Tech Smoothing and Mapping library,是佐治亚理工学院的科研人员基于因子图和贝叶斯网络推出的⼀个C++库文件,如果想在工程中使用因子图优化的相关算法,最常用的方式就是借助GTSAM这个库来实现,因为其内部已经封装了关于因子图优化以及iSAM相关的算法实现,只需要像调用其他第三方库的方式(如openCV,PCL等)调用GTSAM库即可。 关于GTSAM库的详细介绍可以参考其官方文档。
GTSAM预积分接口
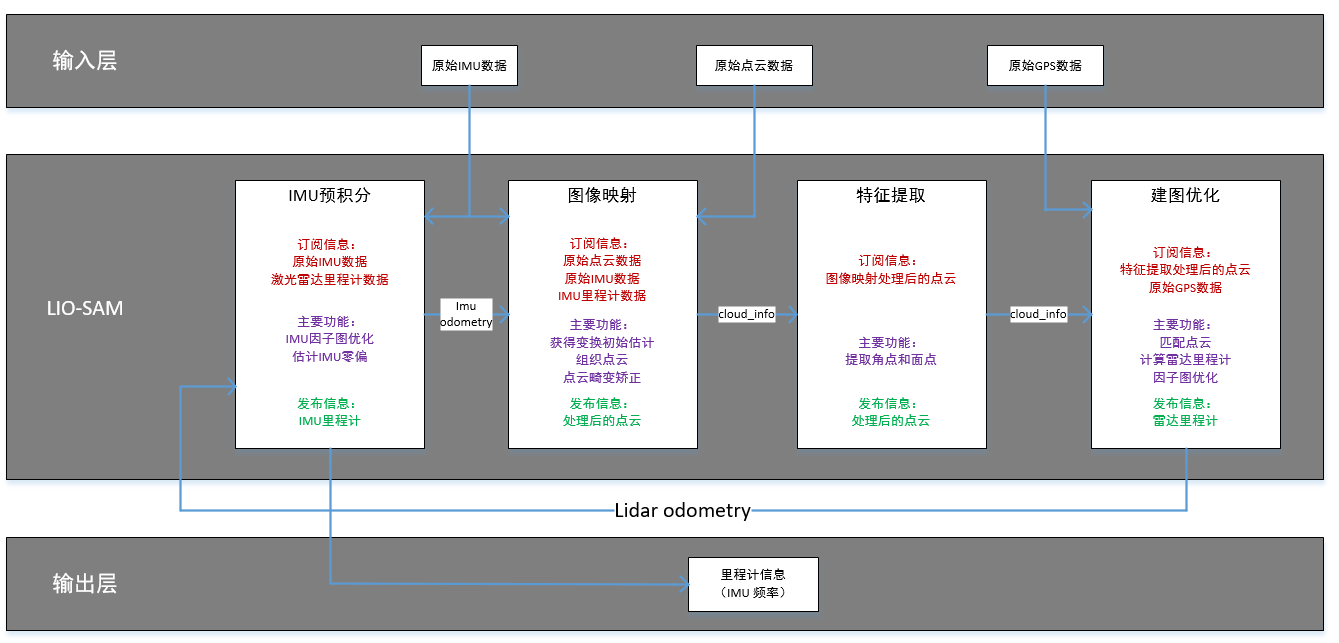
由上面的整体框架,可以看出 LIO-SAM中的IMU预积分节点,该节点最后一个工作,需要前面3个工作完,得到激光雷达里程计后,再进行IMU预积分
- 订阅数据:
imu原始数据
激光雷达里程计(来自建图优化节点) - 功能:
因子图优化(IMU预积分因子、雷达里程计因子)
估计IMU零偏 - 发布消息:
IMU里程计信息
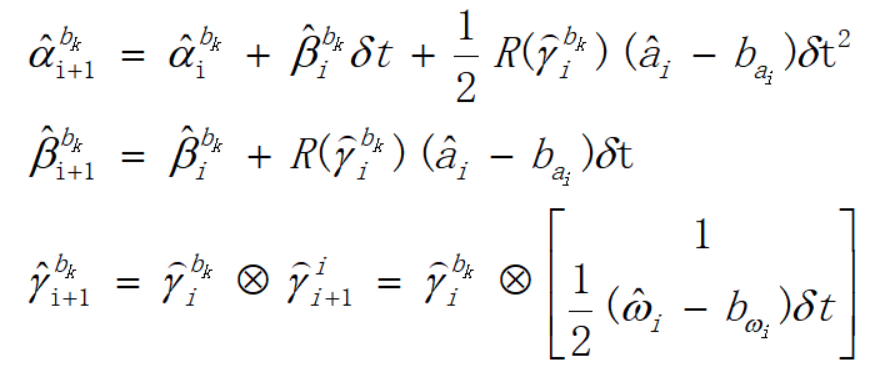
所以IMU预积分要完成的事情就是:
对两个雷达关键帧之间的若干帧IMU进行预积分,以形成预积分约束,对两帧之间的位置、速度、姿态以及零偏进行约束。
GTSAM从4.0版本开始就在内部增加了IMU预积分相关的接口。
下面总结下 GTSAM中的一些相关接口:
预积分相关参数:
gtsam::PreintegrationParams
对IMU数据进行预积分之前需要事先知道IMU的噪声,重力方向(与建模的方式有关,z轴的朝向)等参数。
对应LIO-SAM中的代码有如下部分:
boost::shared_ptr<gtsam::PreintegrationParams> p = gtsam::PreintegrationParams::MakeSharedU(imuGravity);
其中MakeSharedU就是设置重力方向的,其中的设置和IMU的坐标轴建模方向有关
- MakeSharedU 是ENU,就是东北天,内部把imuGravity的值进行了取负。
- MakeSharedD 是NED,就是北东地,内部不改变变量的正负号。
imuGravity是在参数服务器中设置的参数
nh.param<float>("lio_sam/imuGravity", imuGravity, 9.80511);
p->accelerometerCovariance = gtsam::Matrix33::Identity(3,3) * pow(imuAccNoise, 2); // acc white noise in continuous
p->gyroscopeCovariance = gtsam::Matrix33::Identity(3,3) * pow(imuGyrNoise, 2); // gyro white noise in continuous
角速度计和陀螺仪的噪声配置
p->integrationCovariance = gtsam::Matrix33::Identity(3,3) * pow(1e-4, 2);
进行预积分时 ,速度积分得到位置时的噪声
跟预积分相关的计算在这个类中实现:
gtsam::PreintegratedImuMeasurements
对应LIO-SAM中的代码有如下部分:
imuIntegratorImu_ = new gtsam::PreintegratedImuMeasurements(p, prior_imu_bias);
imuIntegratorOpt_ = new gtsam::PreintegratedImuMeasurements(p, prior_imu_bias);
这里两个预积分量一个是用来预积分优化,一个用来推算最新位姿
这个类有⼀些重要的接口。
预积分量复位与设置零偏:
resetIntegrationAndSetBias
功能:将预积分量复位,也就是清空之前的预积分量,重新开始一个新的预积分量。预积分的计算依赖一个初始的IMU零偏,因此在复位之后需要输入零偏值,这里的复位和重设零偏在一个接口里。
对应LIO-SAM中的代码有如下部分:
imuIntegratorImu_->resetIntegrationAndSetBias(prevBias_);
imuIntegratorOpt_->resetIntegrationAndSetBias(prevBias_);
输入IMU的测量值:
integrateMeasurement
输入IMU的测量值,内部会自动实现预积分量的更新以及协方差矩阵的更新
也就是这部分
对应LIO-SAM中的代码有如下部分:
imuIntegratorOpt_->integrateMeasurement(
gtsam::Vector3(thisImu->linear_acceleration.x, thisImu->linear_acceleration.y, thisImu->linear_acceleration.z),
gtsam::Vector3(thisImu->angular_velocity.x, thisImu->angular_velocity.y, thisImu->angular_velocity.z), dt);
预积分量的时间长度:
deltaTij
第i帧和第j帧的时间差
imuIntegratorOpt_->deltaTij()
预积分预测:
predict
预积分量可以计算出两帧之间的相对位置、速度、姿态的变化量,根据预积分结果,结合上一帧的状态量就可以计算出下一关键帧的预测
gtsam::NavState propState_ = imuIntegratorOpt_->predict(prevState_, prevBias_);
根据上一时刻状态,结合预积分结果,对当前状态进行预测

- 点赞
- 收藏
- 关注作者
评论(0)