QT ros环境搭建以及打包发布

【摘要】 第一步 下载 Q T 并安装1 1 官网( http://download.qt.io/archive/qt/5.13/5.13.0/)下载 qt 安装包qt-opensource-linux-x64-5.13.0.run1 2 给安装 run 文件增加执行权限并运行,安装选项全选,路径默认sudo chmod +x qt-opensource-linux-x64-5.13.0.run 2...
第一步 下载 Q T 并安装
1 1 官网( http://download.qt.io/archive/qt/5.13/5.13.0/)下载 qt 安装包
qt-opensource-linux-x64-5.13.0.run
1 2 给安装 run 文件增加执行权限并运行,安装选项全选,路径默认
sudo chmod +x qt-opensource-linux-x64-5.13.0.run 2. ./qt-opensource-linux-x64-5.13.0.run
1.3 修改 bashrc 文件,配置 qtcreator 的快捷访问名为 qt ,在文件末尾添加
alias qt=/opt/Qt5.13.0/Tools/Qtcreator/bin/qtcreator
第二步 安装 R OS 的 Q T 相关功能包
sudo apt-get update 5. sudo apt-get install ros-kinetic-qt-create ros-kinetic-qt-build
第三步 测试 Q T 功能包
3.1 新建工作空间,并新建一个 qt 功能包
mkdir -p qt_ws/src 7. cd qt_ws/src 8. catkin_create_qt_pkg [packname] 9. cd .. & catkin_make
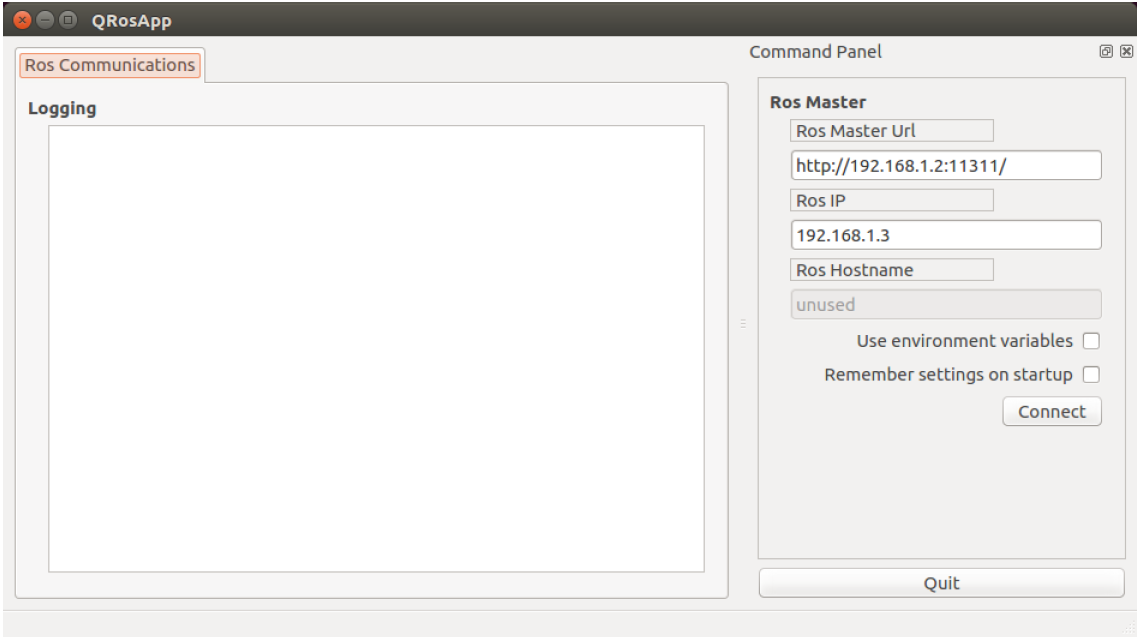
3.2 运行节点
source devel/setup.bash 11. rosrun [packname] xxx
出现以下软件弹窗证明 Q T 功能包测试成功
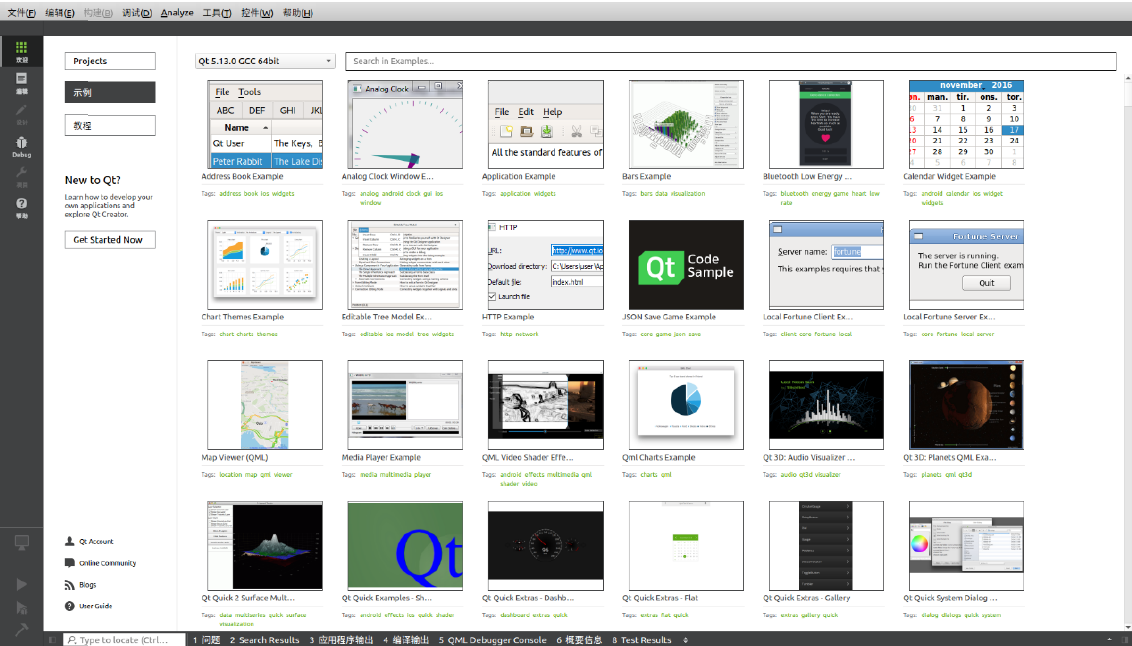
第四步 配置 qtcreator 并运行
4 1 在终端中输入 qt 打开 qtcreator 5.13.0
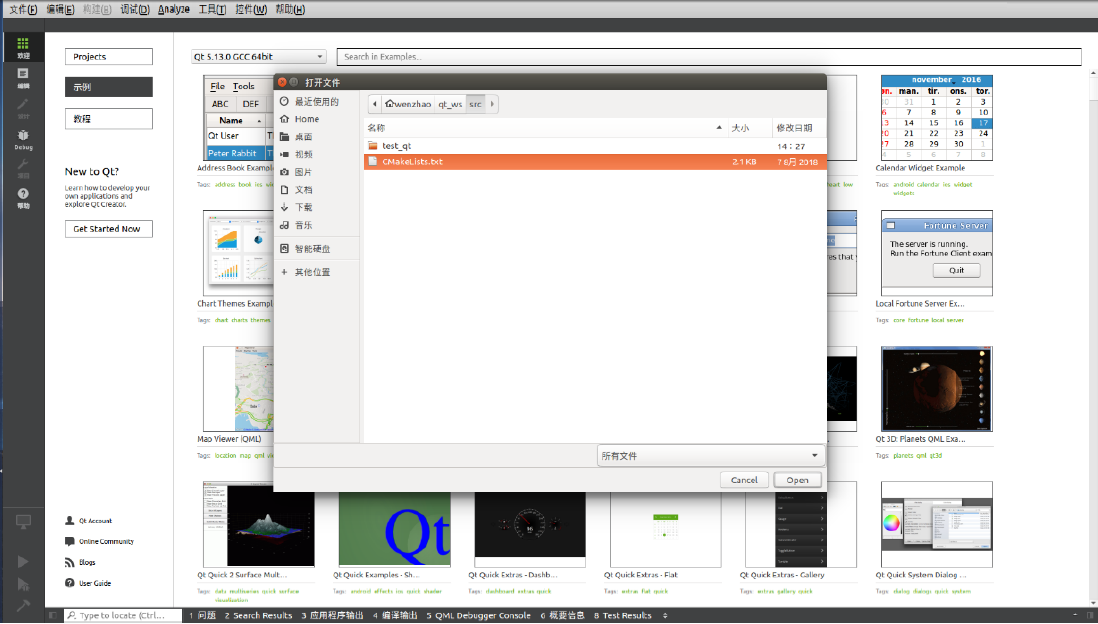
4 2 左上角选择文件 打开项目,选择 qt_ws/src 目录下的 CmakeList.txt
|- cv_bridge <!--依赖功能包cv_bridge -->
|- robotGUI <!--核心功能包robotGUI-->
|- include <!--头文件放置文件夹,在这里我们已修改此层下的CMakeLists,定义头文件的放置位置与cpp一样,均在src文件夹下-->
|- robotGUI
|- main_window.hpp
|- qnode.hpp
|- resources <!--程序资源文件,即图标、背景、logo图片等-->
|- src <!--程序源文件-->
|- drawpicture.h
|- main_window.hpp
|- qnode.hpp
|- btn_control.cpp
|- button.cpp
|- drawpicture.cpp
|- main.cpp
|- main_window.cpp
|- pose_button.cpp
|- qnode.cpp
|- relay_button.cpp
|- ui <!--程序界面布置文件-->
|- main_window.ui
|- CMakeLists.txt <!--Cmakelist文件,定义编译规则-->
|- CmakeLists.txt.user
|- mainpage.dox
|- package.xml <!—neobotGUI功能包的简洁描述-->
|- CMakeLists.txt <!--Cmakelist文件,定义编译规则-->
|- CMakeLists.txt.user
…详情请参考古月居文章

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)