3D激光SLAM:LIO-SAM整体介绍与安装编译

LIO-SAM的全称是:Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
从全称上可以看出,该算法是一个紧耦合的雷达惯导里程计(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM库中的方法。
LIO-SAM 提出了一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架。
实现了高精度、实时的移动机器人的轨迹估计和建图。
框架的构成:
通过相对观测(两帧间的估计)及绝对观测(GPS),还包括回环检测,构成因子图。
这个框架必须要有激光雷达和IMU。可以没有回环和GPS。
IMU的作用:
用IMU的数据对激光雷达点云作畸变矫正
为激光雷达里程计的优化提供一个初值
系统对IMU的作用:
获得的雷达里程计会用来估计IMU的零偏(bias)
点云匹配建图方式:
为了保障性能和实时,并不是将激光雷达一帧数据和全局地图进行匹配,而是和经过边缘化的历史地图进行匹配
这种当前帧和局部地图配置而不是全局地图的做法,可以显著提高系统的实时性。
局部地图构成:
通过选取关键帧的方式,利用滑窗的方法,将当前的关键帧和历史尺度和大小一致的子关键帧集合配准。
测试情况:
提出的方法在三个平台进行了测试,手持设备、UGV、船,在不同场景下表现都很不错。
LIO-SAM整体框架
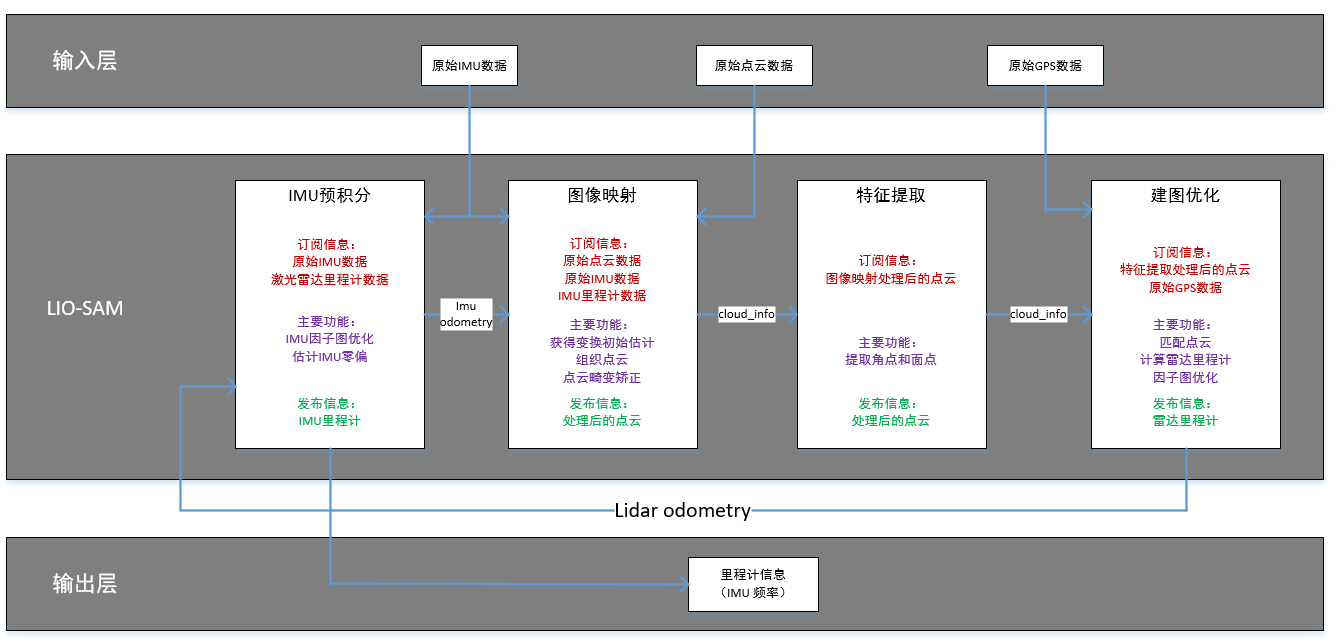
输入层中的三个矩形框是是三个传感器
- IMU
- 点云
- GPS(可选)
输出以IMU的频率发布里程计的结果
LIO-SAM中的四个矩形图,对应ROS中的四个节点。每个节点都有其单独的功能。
图像映射节点
可以先看图像映射的节点
该节点订阅3个消息
- 原始imu数据
- 原始点云数据
- imu里程计数据 来自IMU预积分节点
其中imu里程计数据在系统初始化阶段没有该消息,图像映射节点仅有两个数据
主要功能有四个:
- 获得变换初始估计,该估计是从imu里程计数据获得
- 组织点云,与lego-loam类似,将点云转为深度图像
- 点云畸变矫正 只对旋转部分补偿,平移部分在代码中注释掉了。利用的IMU原始数据
该节点发布的消息:
处理后的点云
特征提取节点
订阅信息1个:
来自图像映射节点的处理后的点云
功能:
提取角点和面点
该节点发布的消息:
处理后的点云
建图优化节点
订阅信息两个
- 特征提取处理后的点云
- 原始GPS数据(可选)
主要功能
- 点云匹配
- 计算雷达里程计的位姿
- 因子图优化(雷达里程计因子、GPS因子、回环因子),注意这里没有IMU因子
发布消息
- 激光雷达里程计,发送给IMU预积分节点
IMU预积分节点
该节点最后一个工作,需要前面3个工作完,得到激光雷达里程计后,再进行IMU预积分
订阅数据:
- imu原始数据
- 激光雷达里程计(来自建图优化节点)
功能:
- 因子图优化(IMU预积分因子、雷达里程计因子)
- 估计IMU零偏
发布消息:
- IMU里程计信息
LIO-SAM编译与安装
可以参考官网
官网地址
该功能包的依赖有
- ROS
验证的版本有Kinetic 和 Melodic
同时需要安装ROS的几个功能包,如下:
sudo apt-get install -y ros-kinetic-navigation
sudo apt-get install -y ros-kinetic-robot-localization
sudo apt-get install -y ros-kinetic-robot-state-publisher
- gtsam
其官网链接为:官网链接
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install
cmake 可以改成如下指令
cmake -DGTSAM_BUILD_EITH_MARCH_NATIVE=OFF -DGTSAM_USE_SYSTEM_EIGEN=ON ..
目的是设置一些宏
DGTSAM_BUILD_EITH_MARCH_NATIVE 是开启css加速的宏,要关闭。避免其它库(比如PCL或者自己代码)没有开启的话,会造成运行时出现异常的情况
DGTSAM_USE_SYSTEM_EIGEN 这个是用系统装的eigen编译的宏,要开启。OFF的话会用gtsam自带的eigen,代码运行存在两个版本eigen会容易出问题
之后就可以下载LIO-SAM的代码进行安装了
cd ~/catkin_ws/src
git clone https://github.com/TixiaoShan/LIO-SAM.git
cd ..
catkin_make
安装编译成功后,会提示如下:

运行
roslaunch lio_sam run.launch
通过上面的指令就能运行了。
但是在运行前,要根据自己的情况进行一些参数配置
在params.yaml文件中可以看到一些配置
pointCloudTopic: "points_raw" # Point cloud data
imuTopic: "/imu_correct" # IMU data
odomTopic: "odometry/imu" # IMU pre-preintegration odometry, same frequency as IMU
gpsTopic: "odometry/gpsz" # GPS odometry topic from navsat, see module_navsat.launch file
其中
- 点云的Topic名称为points_raw
- IMU的Topic名称为/imu_correct
这两个如果自身的数据发布名称不一致,需要改成一致的
- GPS的Topic名称为odometry/gpsz
如果没有GPS可以不用管
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
N_SCAN: 16 # number of lidar channel (i.e., 16, 32, 64, 128) 雷达的通道数量
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)激光雷达水平分辨率 也就是水平角度分辨率 360/1800=0.2
downsampleRate: 1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used 雷达最小距离长度
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used 雷达最大距离长度
这边雷达参数也要对应的设置
extrinsicTrans: [0.0, 0.0, 0.0]
extrinsicRot: [1, 0, 0,
0, 1, 0,
0, 0, 1]
extrinsicRPY: [ 1, 0, 0,
0, 1 , 0,
0, 0, 1]
IMU和类的外参配置一下
别的就没啥了
配置完即可运行launch文件,然后在rviz中就可以看到地图了

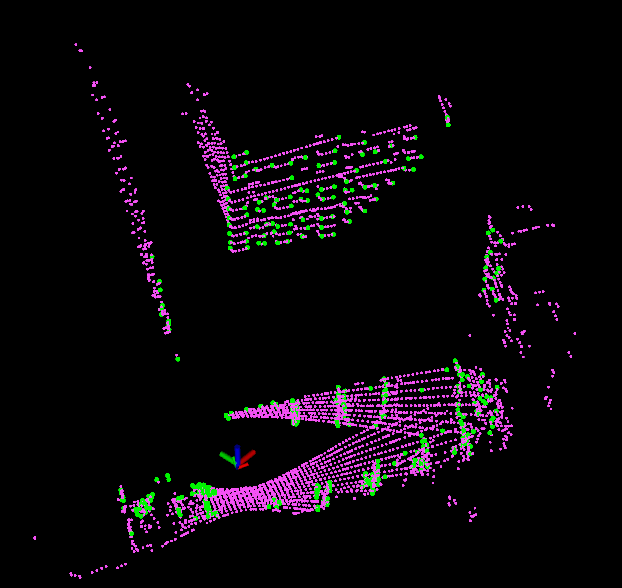
粉色的是面点,绿色的是角点

- 点赞
- 收藏
- 关注作者
评论(0)