MMDetection实战:MMDetection训练与测试

@[toc]
摘要
MMDetection是商汤和港中文大学针对目标检测任务推出的一个开源项目,它基于Pytorch实现了大量的目标检测算法,把数据集构建、模型搭建、训练策略等过程都封装成了一个个模块,通过模块调用的方式,我们能够以很少的代码量实现一个新算法,大大提高了代码复用率。
GitHub链接:https://github.com/open-mmlab/mmdetection。
Gitee链接:https://gitee.com/open-mmlab/mmdetection。
主分支代码目前支持 PyTorch 1.5 以上的版本。主要特性:
-
模块化设计
MMDetection 将检测框架解耦成不同的模块组件,通过组合不同的模块组件,用户可以便捷地构建自定义的检测模型
-
丰富的即插即用的算法和模型
MMDetection 支持了众多主流的和最新的检测算法,例如 Faster R-CNN,Mask R-CNN,RetinaNet 等。
-
速度快
基本的框和 mask 操作都实现了 GPU 版本,训练速度比其他代码库更快或者相当,包括 Detectron2, maskrcnn-benchmark 和 SimpleDet。
-
性能高
MMDetection 这个算法库源自于 COCO 2018 目标检测竞赛的冠军团队 MMDet 团队开发的代码,之后持续进行了改进和提升。
配置文件参数详解
faster_rcnn_r50_fpn_1x_coco.py文件为例,这个文件包含四个文件,分别是:faster_rcnn_r50_fpn.py、coco_detection.py、schedule_1x.py、default_runtime.py。
configs/_base_/schedules/schedule_1x.py
optimizer = dict(type='SGD', lr=0.02, momentum=0.9, weight_decay=0.0001)# 设置优化器类型
optimizer_config = dict(grad_clip=None) # 梯度裁剪配置
#optimizer_config = dict(
# _delete_=True, grad_clip=dict(max_norm=35, norm_type=2))
# lr 参数
lr_config = dict(
policy='step', # lr decay的方式,其余的还有consine cyclic
warmup='linear', # 初始的学习率增加的策略为线性增加
warmup_iters=500, # warmup迭代500次
warmup_ratio=0.001, # warmup的初始学习比率。
step=[8, 11]) # 在8-11个epoch后开始进行lr decay
runner = dict(type='EpochBasedRunner', max_epochs=12) # runner配置,默认epoch为12
faster_rcnn_r50_fpn.py
# model settings
model = dict(
type='FasterRCNN',#model类型
backbone=dict(
type='ResNet',#backone类型
depth=50,#网络层数
num_stages=4,# resnet的stage数量
out_indices=(0, 1, 2, 3), # 输出的stage的序号
frozen_stages=1,# 冻结的stage数量,即该stage不更新参数,-1表示所有的stage都更新参数
norm_cfg=dict(type='BN', requires_grad=True),#表示所采用的归一化算子,一般是 BN 或者 GN。requires_grad 表示该算子是否需要梯度,也就是是否进行参数更新
norm_eval=True,#控制整个骨架网络的归一化算子是否需要变成 eval 模式
style='pytorch',# 网络风格:如果设置pytorch,则stride为2的层是conv3x3的卷积层;如果设置caffe,则stride为2的层是第一个conv1x1的卷积层
init_cfg=dict(type='Pretrained', checkpoint='torchvision://resnet50')),# 表明backbone使用预训练参数,标注其位置
neck=dict(
type='FPN',# FPN特征融合neck
in_channels=[256, 512, 1024, 2048],# FPN接受的channels,和backnone resnet的stage2-5的输出channels对应
out_channels=256,# feature pyramid每一层的输出channel数
num_outs=5),# 输出的feature pyramid特征层数
rpn_head=dict(
type='RPNHead',# RPN网络类型
in_channels=256,# RPN网络的输入通道数
feat_channels=256,# 特征层的通道数
anchor_generator=dict(
type='AnchorGenerator',
scales=[8],# 生成的anchor的baselen,baselen = sqrt(w*h),w和h为anchor的宽和高
ratios=[0.5, 1.0, 2.0],# anchor的宽高比
strides=[4, 8, 16, 32, 64]),# 在每个特征层上的anchor的步长(对应于原图)
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[.0, .0, .0, .0],# 均值
target_stds=[1.0, 1.0, 1.0, 1.0]),# 均值
loss_cls=dict(
type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),
loss_bbox=dict(type='L1Loss', loss_weight=1.0)),
roi_head=dict(
type='StandardRoIHead',
bbox_roi_extractor=dict(
type='SingleRoIExtractor',
roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),
out_channels=256,
featmap_strides=[4, 8, 16, 32]),
bbox_head=dict(
type='Shared2FCBBoxHead',# 对应head类
in_channels=256,# head接受的是feature pyramid的输出,in_channels表示进入head时的通道数是256
fc_out_channels=1024,
roi_feat_size=7,
num_classes=80,# 使用coco数据集,所以是80类
bbox_coder=dict(
type='DeltaXYWHBBoxCoder',
target_means=[0., 0., 0., 0.],
target_stds=[0.1, 0.1, 0.2, 0.2]),
reg_class_agnostic=False,
loss_cls=dict(
type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),
loss_bbox=dict(type='L1Loss', loss_weight=1.0))),
# model training and testing settings
train_cfg=dict(
rpn=dict(
assigner=dict(
type='MaxIoUAssigner',# RPN网络的正负样本划分
pos_iou_thr=0.7,# RPN网络的正负样本划分
neg_iou_thr=0.3,# 负样本的iou阈值
min_pos_iou=0.3,# 正样本的iou最小值。如果assign给ground truth的anchors中最大的IOU低于0.3,则忽略所有的anchors,否则保留最大IOU的anchor
match_low_quality=True,
ignore_iof_thr=-1),# 忽略bbox的阈值,当ground truth中包含需要忽略的bbox时使用,-1表示不忽略
sampler=dict(
type='RandomSampler',# 正负样本提取器类型
num=256,# 需提取的正负样本数量
pos_fraction=0.5,# 正样本比例
neg_pos_ub=-1,# 最大负样本比例,大于该比例的负样本忽略,-1表示不忽略
add_gt_as_proposals=False),# 把ground truth加入proposal作为正样本
allowed_border=-1,# 允许在bbox周围外扩一定的像素
pos_weight=-1,# 正样本权重,-1表示不改变原始的权重
debug=False),# debug模式
rpn_proposal=dict(
nms_pre=2000,
max_per_img=1000,
nms=dict(type='nms', iou_threshold=0.7),# nms阈值
min_bbox_size=0),
rcnn=dict(
assigner=dict(
type='MaxIoUAssigner',# RCNN网络正负样本划分
pos_iou_thr=0.5,# 正样本的iou阈值
neg_iou_thr=0.5,# 负样本的iou阈值
min_pos_iou=0.5,# 正样本的iou最小值。如果assign给ground truth的anchors中最大的IOU低于0.3,则忽略所有的anchors,否则保留最大IOU的anchor
match_low_quality=False,
ignore_iof_thr=-1),# 忽略bbox的阈值,当ground truth中包含需要忽略的bbox时使用,-1表示不忽略
sampler=dict(
type='RandomSampler',# 正负样本提取器类型
num=512,# 需提取的正负样本数量
pos_fraction=0.25,# 正样本比例
neg_pos_ub=-1,# 最大负样本比例,大于该比例的负样本忽略,-1表示不忽略
add_gt_as_proposals=True),# 把ground truth加入proposal作为正样本
pos_weight=-1,# 正样本权重,-1表示不改变原始的权重
debug=False)),
test_cfg=dict(
rpn=dict(
nms_pre=1000,# 在nms之前保留的的得分最高的proposal数量
max_per_img=1000,
nms=dict(type='nms', iou_threshold=0.7),
min_bbox_size=0), # 最小bbox尺寸
rcnn=dict(
score_thr=0.05,
nms=dict(type='nms', iou_threshold=0.5),# nms阈值
max_per_img=100)
# soft-nms is also supported for rcnn testing
# e.g., nms=dict(type='soft_nms', iou_threshold=0.5, min_score=0.05)
))
环境准备
CUDA:11.3
新建虚拟环境openmm
conda create --name openmm python=3.7
然后,激活环境。
Win10执行命令:
activate openmm
UBuntu执行命令:
source activate openmm
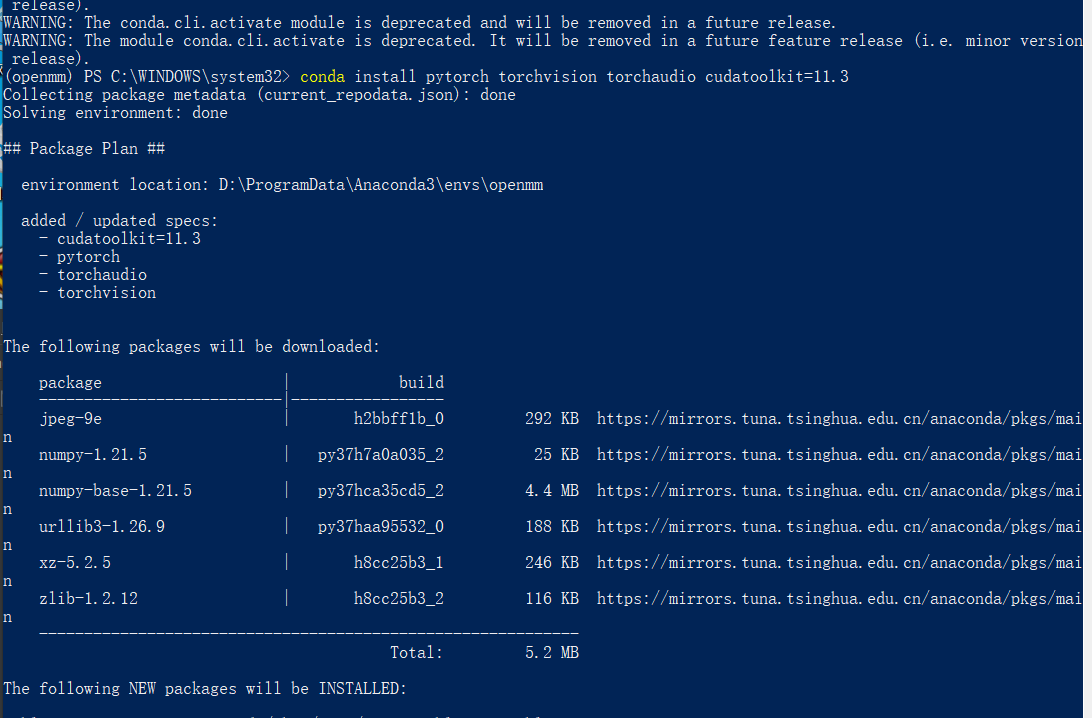
进入虚拟环境后,安装pytorch,输入命令:
conda install pytorch torchvision torchaudio cudatoolkit=11.3
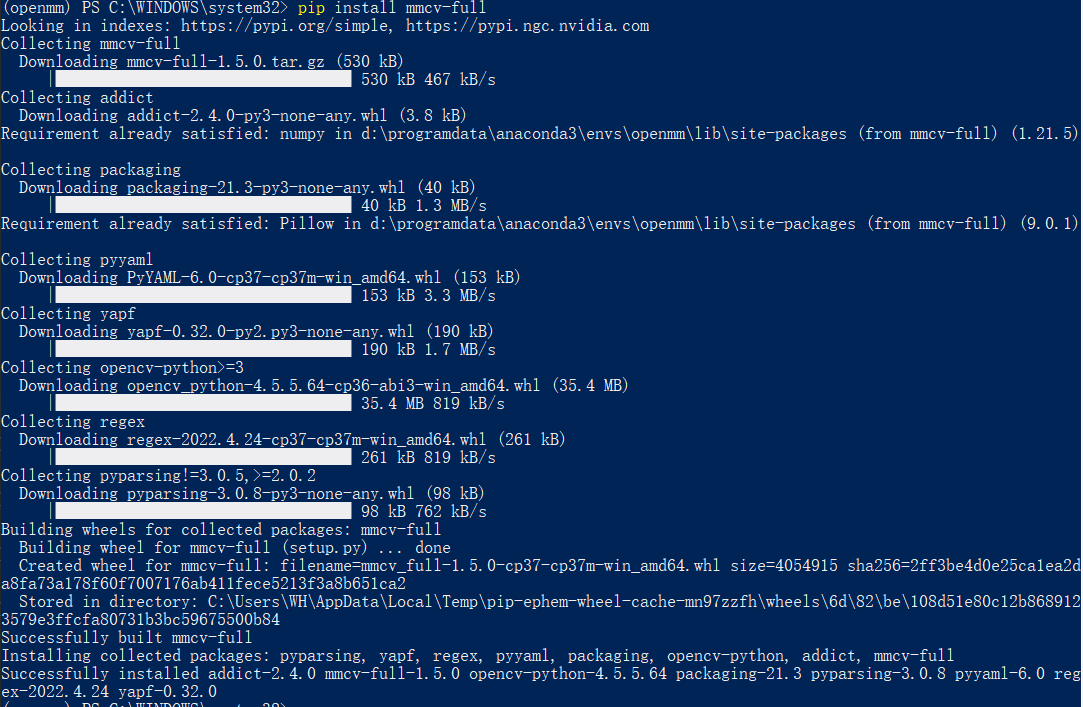
安装mmcv,执行命令:
pip install mmcv-full
安装mmcv-full,等待的时间较长。如果不报错误,耐心等待即可。
安装完成后,下载mmdetection, 地址链接:https://gitee.com/open-mmlab/mmdetection。
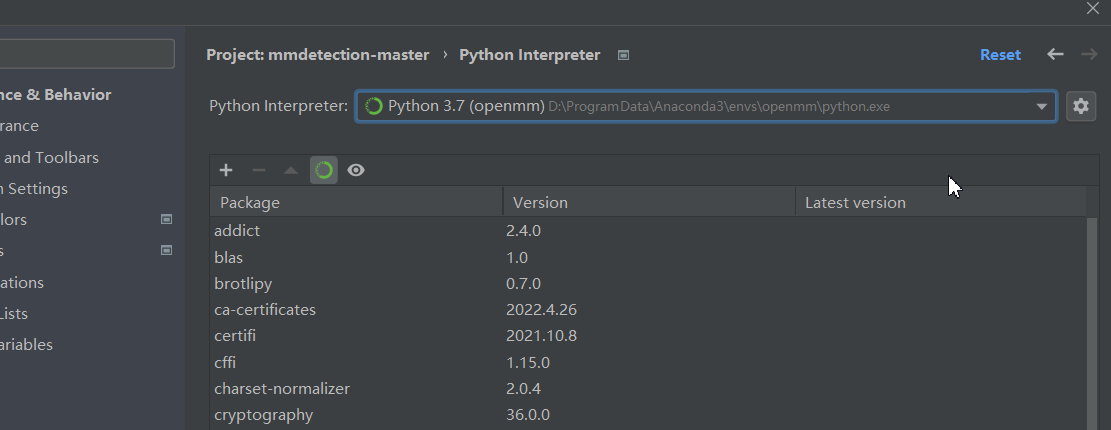
下载完成后,解压,然后pycharm打开。
添加刚才新建的虚拟环境。

在Terminal中激活openmm虚拟环境,防止虚拟环境没有切换过来。
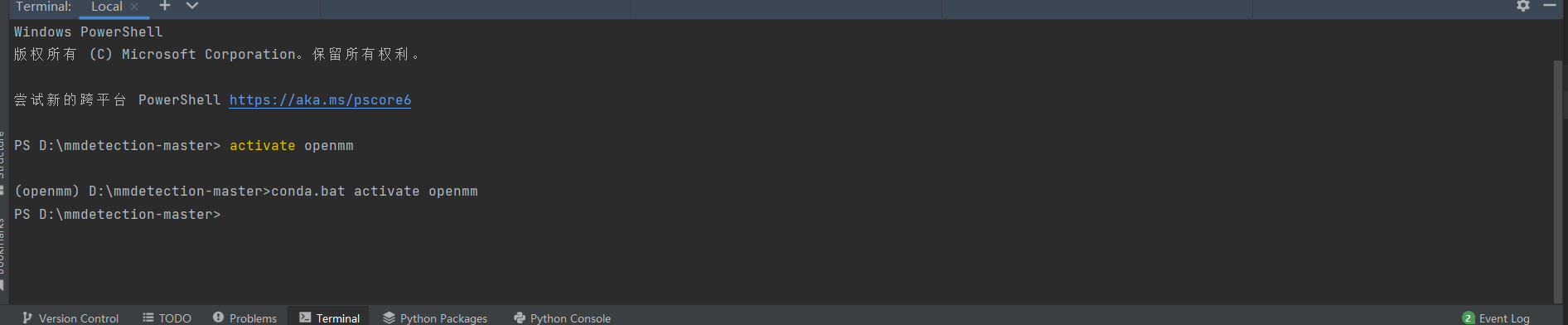
然后,安装mmdet,在Terminal中执行命令:
python setup.py install
在安装mmdet的过程中,会自动下载所需要的安装包。如果存在不能下载的情况,需要单独安装。直到出现下图即可。
验证环境
在工程的根目录新建checkpoints文件夹,下载预训练权重文件,链接:
http://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth
下载完成后,将其放入到checkpoints文件夹
新建demo.py文件,插入代码:
from mmdet.apis import init_detector, inference_detector
config_file = 'configs/faster_rcnn/faster_rcnn_r50_fpn_1x_coco.py'
# 从 model zoo 下载 checkpoint 并放在 `checkpoints/` 文件下
# 网址为: http://download.openmmlab.com/mmdetection/v2.0/faster_rcnn/faster_rcnn_r50_fpn_1x_coco/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth
checkpoint_file = 'checkpoints/faster_rcnn_r50_fpn_1x_coco_20200130-047c8118.pth'
device = 'cuda:0'
img='demo/demo.jpg'
# 初始化检测器
model = init_detector(config_file, checkpoint_file, device=device)
# 推理演示图像
result=inference_detector(model, img)
model.show_result(img, result, out_file='result.jpg')
运行代码:

看到这张图说明环境没有问题。
接下来,使用这个环境训练自定义数据集。
训练
制作数据集
Labelme标注的数据集地址链接:
https://download.csdn.net/download/hhhhhhhhhhwwwwwwwwww/63242994?spm=1001.2014.3001.5503
有32个类别,分别是:‘c17’, ‘c5’, ‘helicopter’, ‘c130’, ‘f16’, ‘b2’, ‘other’, ‘b52’, ‘kc10’, ‘command’, ‘f15’, ‘kc135’, ‘a10’, ‘b1’, ‘aew’, ‘f22’, ‘p3’, ‘p8’, ‘f35’, ‘f18’, ‘v22’, ‘f4’, ‘globalhawk’, ‘u2’, ‘su-27’, ‘il-38’, ‘tu-134’, ‘su-33’, ‘an-70’, ‘su-24’, ‘tu-22’, ‘il-76’。
先将其转为COCO数据集,转换代码如下:
# -*- coding:utf-8 -*-
# !/usr/bin/env python
import json
import os
import shutil
from labelme import utils
import numpy as np
import glob
import PIL.Image
labels={'c17':0,'c5':1,'helicopter':2,'c130':3,'f16':4,
'b2':5,'other':6,'b52':7,'kc10':8,'command':9,'f15':10,
'kc135':11,'a10':12,'b1':13,'aew':14,'f22':15,'p3':16,'p8':17,
'f35':18,'f18':19,'v22':20,'f4':21,'globalhawk':22,'u2':23,'su-27':24,
'il-38':25,'tu-134':26,'su-33':27,'an-70':28,'su-24':29,'tu-22':30,'il-76':31}
class MyEncoder(json.JSONEncoder):
def default(self, obj):
if isinstance(obj, np.integer):
return int(obj)
elif isinstance(obj, np.floating):
return float(obj)
elif isinstance(obj, np.ndarray):
return obj.tolist()
else:
return super(MyEncoder, self).default(obj)
class labelme2coco(object):
def __init__(self, labelme_json=[], save_json_path='./tran.json'):
'''
:param labelme_json: 所有labelme的json文件路径组成的列表
:param save_json_path: json保存位置
'''
self.labelme_json = labelme_json
self.save_json_path = save_json_path
self.images = []
self.categories = []
self.annotations = []
# self.data_coco = {}
self.label = []
self.annID = 1
self.height = 0
self.width = 0
self.save_json()
def data_transfer(self):
for num, json_file in enumerate(self.labelme_json):
imagePath=json_file.split('.')[0]+'.jpg'
imageName=imagePath.split('\\')[-1]
# print(imageName)
with open(json_file, 'r') as fp:
data = json.load(fp) # 加载json文件
self.images.append(self.image(data, num,imageName))
for shapes in data['shapes']:
label = shapes['label'].lower()
if label not in self.label:
self.categories.append(self.categorie(label))
self.label.append(label)
points = shapes['points'] # 这里的point是用rectangle标注得到的,只有两个点,需要转成四个点
# points.append([points[0][0],points[1][1]])
# points.append([points[1][0],points[0][1]])
self.annotations.append(self.annotation(points, label, num))
self.annID += 1
def image(self, data, num,imagePath):
image = {}
img = utils.img_b64_to_arr(data['imageData']) # 解析原图片数据
# img=io.imread(data['imagePath']) # 通过图片路径打开图片
# img = cv2.imread(data['imagePath'], 0)
height, width = img.shape[:2]
img = None
image['height'] = height
image['width'] = width
image['id'] = num + 1
# image['file_name'] = data['imagePath'].split('/')[-1]
image['file_name'] = imagePath
self.height = height
self.width = width
return image
def categorie(self, label):
categorie = {}
categorie['supercategory'] = 'Cancer'
categorie['id'] = labels[label] # 0 默认为背景
categorie['name'] = label
return categorie
def annotation(self, points, label, num):
annotation = {}
annotation['segmentation'] = [list(np.asarray(points).flatten())]
annotation['iscrowd'] = 0
annotation['image_id'] = num + 1
# annotation['bbox'] = str(self.getbbox(points)) # 使用list保存json文件时报错(不知道为什么)
# list(map(int,a[1:-1].split(','))) a=annotation['bbox'] 使用该方式转成list
annotation['bbox'] = list(map(float, self.getbbox(points)))
annotation['area'] = annotation['bbox'][2] * annotation['bbox'][3]
# annotation['category_id'] = self.getcatid(label)
annotation['category_id'] = self.getcatid(label) # 注意,源代码默认为1
# print(label,annotation['category_id'])
annotation['id'] = self.annID
return annotation
def getcatid(self, label):
for categorie in self.categories:
if label == categorie['name']:
return categorie['id']
return 1
def getbbox(self, points):
# img = np.zeros([self.height,self.width],np.uint8)
# cv2.polylines(img, [np.asarray(points)], True, 1, lineType=cv2.LINE_AA) # 画边界线
# cv2.fillPoly(img, [np.asarray(points)], 1) # 画多边形 内部像素值为1
polygons = points
mask = self.polygons_to_mask([self.height, self.width], polygons)
return self.mask2box(mask)
def mask2box(self, mask):
'''从mask反算出其边框
mask:[h,w] 0、1组成的图片
1对应对象,只需计算1对应的行列号(左上角行列号,右下角行列号,就可以算出其边框)
'''
# np.where(mask==1)
index = np.argwhere(mask == 1)
rows = index[:, 0]
clos = index[:, 1]
# 解析左上角行列号
left_top_r = np.min(rows)+1 # y
left_top_c = np.min(clos)+1 # x
# 解析右下角行列号
right_bottom_r = np.max(rows)
right_bottom_c = np.max(clos)
# return [(left_top_r,left_top_c),(right_bottom_r,right_bottom_c)]
# return [(left_top_c, left_top_r), (right_bottom_c, right_bottom_r)]
# return [left_top_c, left_top_r, right_bottom_c, right_bottom_r] # [x1,y1,x2,y2]
return [left_top_c, left_top_r, right_bottom_c - left_top_c,
right_bottom_r - left_top_r] # [x1,y1,w,h] 对应COCO的bbox格式
def polygons_to_mask(self, img_shape, polygons):
mask = np.zeros(img_shape, dtype=np.uint8)
mask = PIL.Image.fromarray(mask)
xy = list(map(tuple, polygons))
PIL.ImageDraw.Draw(mask).polygon(xy=xy, outline=1, fill=1)
mask = np.array(mask, dtype=bool)
return mask
def data2coco(self):
data_coco = {}
data_coco['images'] = self.images
data_coco['categories'] = self.categories
data_coco['annotations'] = self.annotations
return data_coco
def save_json(self):
self.data_transfer()
self.data_coco = self.data2coco()
# 保存json文件
json.dump(self.data_coco, open(self.save_json_path, 'w'), indent=4, cls=MyEncoder) # indent=4 更加美观显示
def copy_image(dirs,files,image_type):
for txt in files:
image_path=txt.split('.')[0]+"."+image_type
image_name=image_path.replace('\\','/').split('/')[-1]
new_path=os.path.join(dirs,image_name)
shutil.copyfile(image_path, new_path)
labelme_json = glob.glob('USA-Labelme/*.json')
from sklearn.model_selection import train_test_split
trainval_files, test_files = train_test_split(labelme_json, test_size=0.2, random_state=55)
print(trainval_files)
os.makedirs('train2017',exist_ok=True)
os.makedirs('val2017',exist_ok=True)
copy_image('train2017',trainval_files,'jpg')
copy_image('val2017',test_files,'jpg')
labelme2coco(trainval_files, 'instances_train2017.json')
labelme2coco(test_files, 'instances_val2017.json')
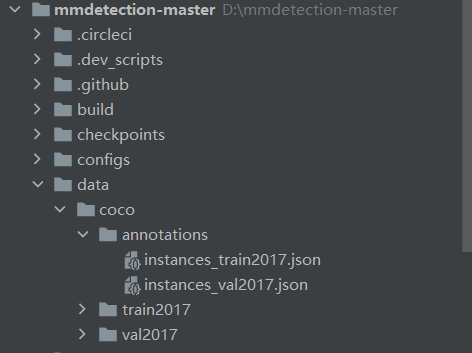
在mmdetection-master的根目录下面,新建data文件夹,然后再data文件夹下面新建coco文件夹,在coco文件夹下面新建annotations文件夹,将训练集和验证集的json放进去。将train2017文件夹和val2017文件夹放到coco文件夹下面,目录如下:
mmdetection
├── data
│ ├── coco
│ │ ├── annotations
│ │ ├── train2017
│ │ └── val2017
如下图:
到这里数据集制作完成了。
修改配置文件
configs/算法/配置文件。打开配置文件修改num_classes的个数,COCO默认是80,我们按照实际的类别修改即可。
例:configs/yolo/yolov3_d53_mstrain-608_273e_coco.py
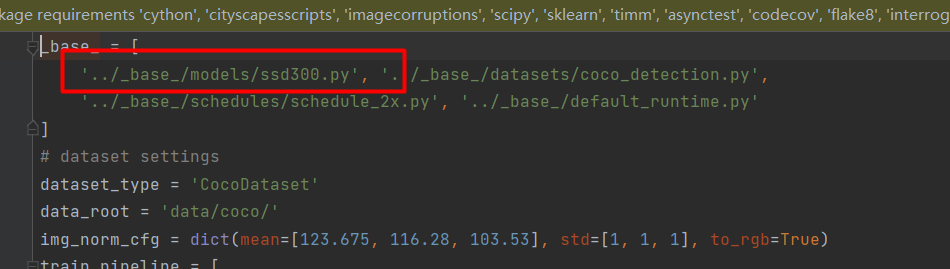
但是,有的模型在的类别找不到,那么我们如何找到呢?比如
configs/ssd/ssd300_coco.py,这个配置文件里面就没有num_classes这个字段,我们寻找最上面的_base_字段。
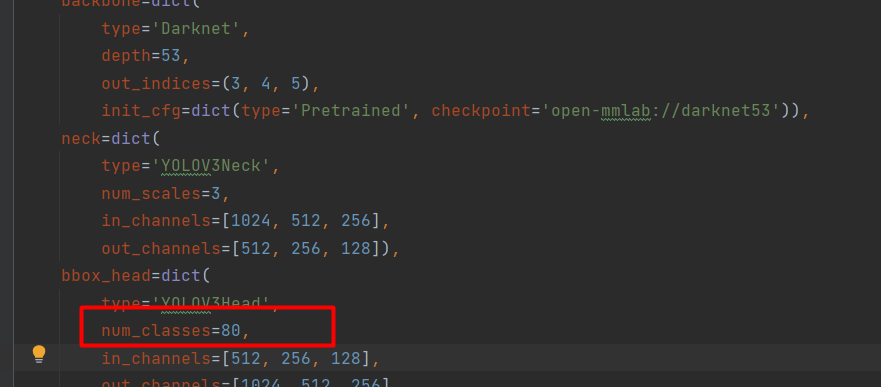
也有ssd300.py这个文件,将其打开。
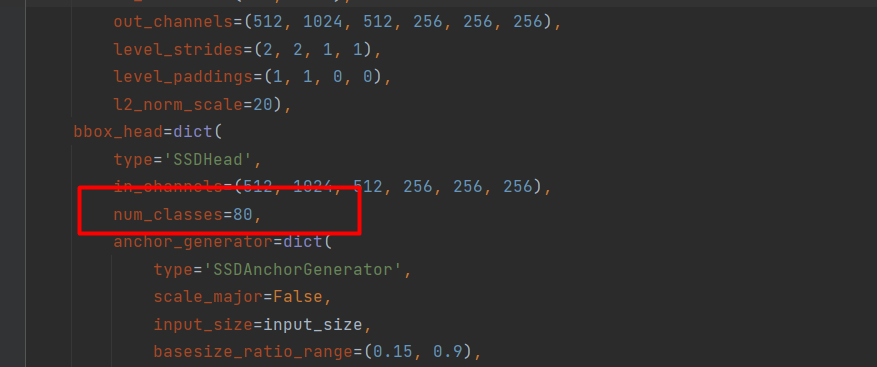
找到了num_classes这个字段,将其修改为数据集的类别个数。我们本次使用的数据集的类别是32,所以将其修改为32。
修改该学习率,路径“configs/ssd/ssd300_coco.py”。如下图:
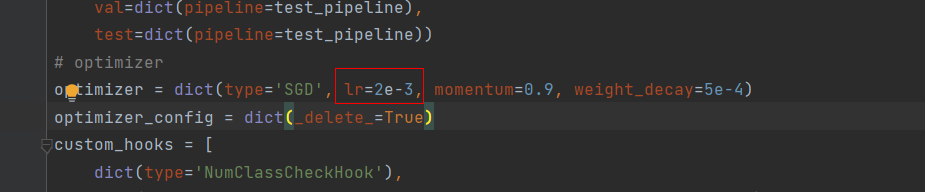
将2e-3改为2e-4,否则会出现loss为NAN的问题。
修改该BatchSize,路径“configs/ssd/ssd300_coco.py”。如下图:
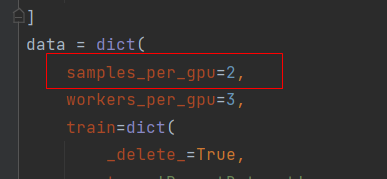
这是针对每张显卡设置Batchsize。调整到合适的大小就可以训练了。
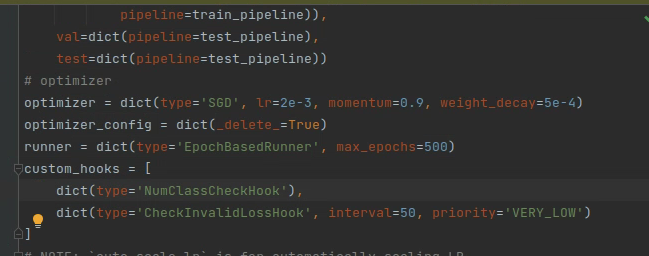
修改epoch,在configs/ssd/ssd300_coco.py中添加
runner = dict(type='EpochBasedRunner', max_epochs=500)
修改数据集的类别
mmdet/core/evaluation/classnames.py找到def coco_classes():将COCO类别替换为自己数据的类别。本例是:
def coco_classes():
return [
'c17', 'c5', 'helicopter', 'c130', 'f16', 'b2',
'other', 'b52', 'kc10', 'command', 'f15',
'kc135', 'a10', 'b1', 'aew', 'f22', 'p3', 'p8',
'f35', 'f18', 'v22', 'f4', 'globalhawk', 'u2', 'su-27',
'il-38', 'tu-134', 'su-33', 'an-70', 'su-24', 'tu-22',
'il-76']
mmdet/datasets/coco.py找到class CoCoDataset(CustomDataset):将COCO的类别替换为自己数据集的类别。本例如下:
class CocoDataset(CustomDataset):
CLASSES = ('c17', 'c5', 'helicopter', 'c130', 'f16', 'b2',
'other', 'b52', 'kc10', 'command', 'f15',
'kc135', 'a10', 'b1', 'aew', 'f22', 'p3', 'p8',
'f35', 'f18', 'v22', 'f4', 'globalhawk', 'u2', 'su-27',
'il-38', 'tu-134', 'su-33', 'an-70', 'su-24', 'tu-22',
'il-76')
PALETTE = [(220, 20, 60), (119, 11, 32), (0, 0, 142), (0, 0, 230),
(106, 0, 228), (0, 60, 100), (0, 80, 100), (0, 0, 70),
(0, 0, 192), (250, 170, 30), (100, 170, 30), (220, 220, 0),
(175, 116, 175), (250, 0, 30), (165, 42, 42), (255, 77, 255),
(0, 226, 252), (182, 182, 255), (0, 82, 0), (120, 166, 157),
(110, 76, 0), (174, 57, 255), (199, 100, 0), (72, 0, 118),
(255, 179, 240), (0, 125, 92), (209, 0, 151), (188, 208, 182),
(0, 220, 176), (255, 99, 164), (92, 0, 73), (133, 129, 255)]
开始训练
由于修改了参数,在训练之前还要重新编译一次。否则之前修改的参数不会生效。再次执行命令:
python setup.py install
然后就可以开始训练了。执行命令:
python tools/train.py configs/ssd/ssd300_coco.py
 对train.py重要参数的解析:
对train.py重要参数的解析:
--work-dir:指定训练保存模型和日志的路径--resume-from:从预训练模型chenkpoint中恢复训练--no-validate:训练期间不评估checkpoint--gpus:指定训练使用GPU的数量(仅适用非分布式训练)--gpu-ids: 指定使用哪一块GPU(仅适用非分布式训练)--seed:随机种子--deterministic:是否为CUDNN后端设置确定性选项--options: arguments in dict--launcher: {none,pytorch,slurm,mpi} job launcher--local_rank: LOCAL_RANK--autoscale-lr: automatically scale lr with the number of
测试
测试执行代码:
python tools/test.py configs/ssd/ssd300_coco.py work_dirs/ssd300_coco/epoch_348.pth --out ./test_result/mask_rcnn_r50_fpn_1x/latest.pkl --eval bbox segm --s
how
然后我们就可以看到测试结果:

完整代码和数据集:
https://download.csdn.net/download/hhhhhhhhhhwwwwwwwwww/85331635

- 点赞
- 收藏
- 关注作者
评论(0)