ROS设置plugin插件

为什么要设置plugin插件
因为很多时候我们需要对产品进行包装。核心的代码是只留下输入输出接口的,所以我们使用plugin来实现.so文件的封装以及动态调取。
在ROS的开发中,常常会接触到一个名词——插件(plugin)。这个名词在计算机软件开发中是常常会提到的,具体含义可以参考百度百科的插件词条。在ROS中,插件的概念类似,简单来讲,ROS中的插件(plugin)就是可以动态加载的扩展功能类。ROS中的pluginlib功能包,提供了加载和卸载plugin的C++库,开发者在使用plugin时,不需要考虑plugin类的链接位置,只需要将plugin注册到pluginlib中,即可直接动态加载。这种插件机制非常方便,开发者不需要改动原本软件的代码,直接将需要的功能通过plugin进行扩展即可。本文带你走近plugin,探索如何实现一个简单的plugin。
我们首先通过下边这张图来了解一下pluginlib的工作原理。
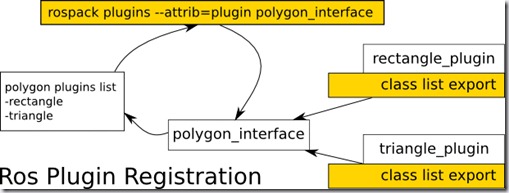
假设ROS的功能包中已经存在一个polygon的基类(polygon_interface_package),我们可以通过plugin来实现两种polygon的功能支持:rectangle_plugin(rectangle_plugin_package)和triangle_plugin(triangle_plugin_package),在这两个功能包的package.xml中,需要声明polygon_interface_package中的基类polygon,然后在编译的过程中,会把插件注册到ROS系统,用户可以直接通过rospack的命令进行全局的插件查询,也可以在开发中直接使用这些插件了。
详细流程
pluginlib利用了C++多态的特性,不同的插件只要使用统一的接口,就可以替换使用,用户在使用过程中也不需要修改代码或者重新编译,选择需要使用的插件即可扩展相应的功能。一般来讲,实现一个插件主要需要以下几个步骤:
- 创建基类,定义统一的接口。如果是基于现有的基类实现plugin,则不需要这个步骤。
- 创建plugin类,继承基类,实现统一的接口。
- 注册插件
- 编译生成插件的动态链接库
- 将插件加入ROS系统
1)创建基类
接下来,我们就根据这几个步骤来实现第一节图示中的plugin功能,在开始之前,你需要建立一个pluginlib_tutorials的功能包,添加依赖pluginlib。
catkin_create_pkg pluginlib_tutorials roscpp pluginlib
此时,工程目录环境如下(注意这里有一些文件是后边步骤中才创建的):
catkin/
|---src/
|---CMakeLists.txt -> /opt/ros/kinetic/share/catkin/cmake/toplevel.cmake
|---pluginlib_tutorials_/
|---CMakeLists.txt
|---include/
|---pluginlib_tutorials_/
|---package.xml
|---polygon_plugins.xml
|---src/
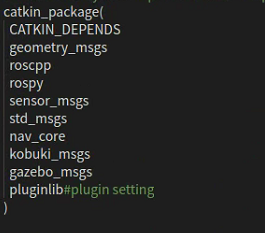
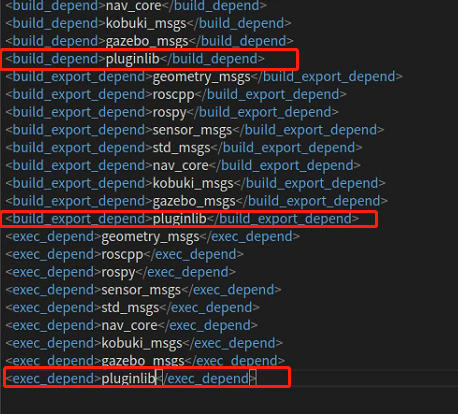
在CMakeLists.txt和package.xml中如下图所示会出现pluginlib的库
创建catkin/src/pluginlib_tutorials_/include/pluginlib_tutorials_/polygon_base.h文件,并写入如下代码:
#ifndef PLUGINLIB_TUTORIALS__POLYGON_BASE_H_
#define PLUGINLIB_TUTORIALS__POLYGON_BASE_H_
namespace polygon_base
{
class RegularPolygon
{
public:
virtual void initialize(double side_length) = 0;
virtual double area() = 0;
virtual ~RegularPolygon(){}
protected:
RegularPolygon(){}
};
};
#endif
这里创建了个RegularPolygon抽象基类,后边的插件类就是继承该类。
2)创建插件
在include目录下创建include/pluginlib_tutorials_/polygon_plugins.h文件,并写入如下代码:
#ifndef PLUGINLIB_TUTORIALS__POLYGON_PLUGINS_H_
#define PLUGINLIB_TUTORIALS__POLYGON_PLUGINS_H_
#include <pluginlib_tutorials_/polygon_base.h>
#include <cmath>
namespace polygon_plugins
{
class Triangle : public polygon_base::RegularPolygon
{
public:
Triangle(){}
void initialize(double side_length)
{
side_length_ = side_length;
}
double area()
{
return 0.5 * side_length_ * getHeight();
}
double getHeight()
{
return sqrt((side_length_ * side_length_) - ((side_length_ / 2) * (side_length_ / 2)));
}
private:
double side_length_;
};
class Square : public polygon_base::RegularPolygon
{
public:
Square(){}
void initialize(double side_length)
{
side_length_ = side_length;
}
double area()
{
return side_length_ * side_length_;
}
private:
double side_length_;
};
};
#endif
这里创建了两个继承自基础类RegularPolygon的插件子类Triangle和Square。
3)注册插件
在2)中已经创建了两个类Triangle和Square,接下来需要使用pluginlib将这两个类声明为插件。
创建src/polygon_plugins.cpp文件,并写入以下代码:
#include <pluginlib/class_list_macros.h>
#include <pluginlib_tutorials_/polygon_base.h>
#include <pluginlib_tutorials_/polygon_plugins.h>
//注册插件,宏参数:plugin的实现类,plugin的基类
PLUGINLIB_EXPORT_CLASS(polygon_plugins::Triangle, polygon_base::RegularPolygon)
PLUGINLIB_EXPORT_CLASS(polygon_plugins::Square, polygon_base::RegularPolygon)
这里前三行include分别引入的头文件,是为了以下内容PLUGINLIB_EXPORT_CLASS、polygon_base::RegularPolygon、polygon_plugins::Triangle、polygon_plugins::Square能够找到。
后边两行代码,使用pluginlib中提供的PLUGINLIB_EXPORT_CLASS来将polygon_plugins::Triangle、polygon_plugins::Square注册为插件,这两个类的父类为polygon_base::RegularPolygon。
4)编译插件
在CMakeLists.txt文件中写入下面两行代码:
include_directories(include)
add_library(polygon_plugins src/polygon_plugins.cpp)
#可以考虑下面的使用install实现将插件放置到可执行文件或者库文件中
install(FILES blp_plugin.xml
DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
)
install具体可以参照《CMakeLists文件install的使用》进行设置,ROS当中的CATKIN_PACKAGE_SHARE_DESTINATION可以参照下文。
此时,可以在命令行窗口的工作空间顶目录下输入catkin_make命令进行编译:
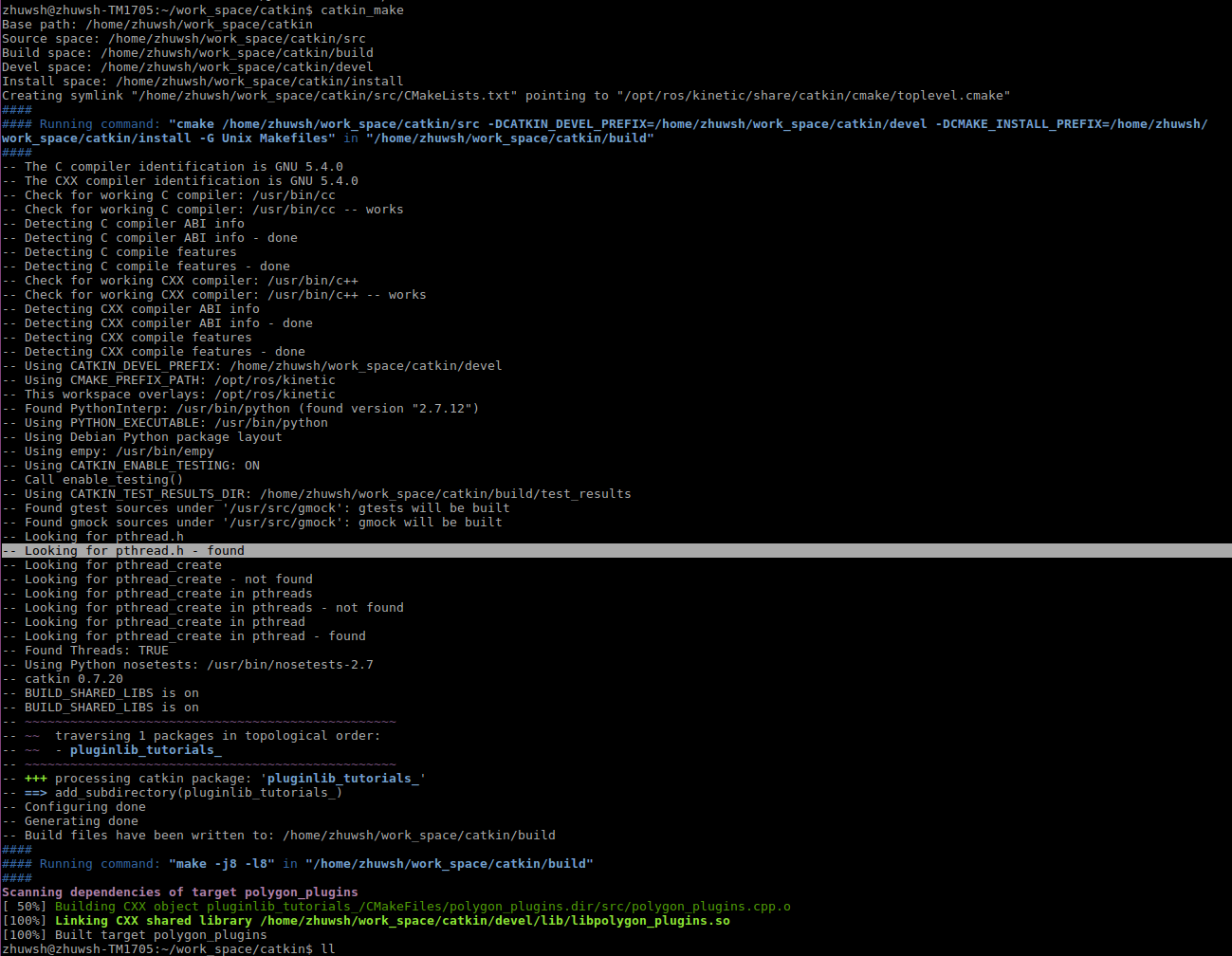
通过编译日志可以看出,编译完成后生成了动态库libpolygon_plugins.so,存放在devel/lib下面。这个也就是我们创建成功的插件文件。
至此,插件创建成功了,下面徐亚创建插件描述文件以让ROS中插件加载器找到这个插件并提供给每个应用程序中来使用。
5)将创建的插件添加到ROS的工具链当中
(1)创建插件描述文件
在catkin/src/pluginlib_tutorials_/路径下创建polygon_plugins.xml文件,并写入以下代码:
<library path="lib/libpolygon_plugins">
<class type="polygon_plugins::Triangle" base_class_type="polygon_base::RegularPolygon">
<description>This is a triangle plugin.</description>
</class>
<class type="polygon_plugins::Square" base_class_type="polygon_base::RegularPolygon">
<description>This is a square plugin.</description>
</class>
</library>
可以仔细看一下这个xml文件中的内容。
<library path="lib/libpolygon_plugins"> library标签写明了要输出的lib文件所在的相对路径;
<class></class> class标签内容写明了插件的信息。
type:插件的完整类型,例如polygon_plugins::Triangle;
base_class_type:插件完整类型的父类,例如polygon_base::RegularPolygon;
description:描述插件是做什么的;
(2)导出插件
在package.xml文件中写入以下代码,将创建的插件导出:
<export>
<pluginlib_tutorials_ plugin="${prefix}/polygon_plugins.xml" />
</export>
可以看出,这里使用export标签将插件导出,里边指定了以上创建的插件描述文件的路径,其中pluginlib_tutorials_为基类所在的包名称。
此时,再次进行编译:
验证创建的插件是否有效:
这里,先source一下setup.bash文件,然后输入以下命令:
rospack plugins --attrib=plugin pluginlib_tutorials_
可以看出输出结果为创建的插件polygon_plugins.xml的绝对路径,这表明ROS工具链设置正确,可以和创建的插件一起使用。
在ROS程序中使用插件
插件已经创建好了,怎么使用插件呢?这里需要写一个插件测试程序来使用插件。
打开src/polygon_loader.cpp文件,并写入以下内容:
#include <pluginlib/class_loader.h>
#include <pluginlib_tutorials_/polygon_base.h>
int main(int argc, char** argv)
{
// 创建一个ClassLoader,用来加载plugin
pluginlib::ClassLoader<polygon_base::RegularPolygon> poly_loader("pluginlib_tutorials_", "polygon_base::RegularPolygon");
try
{
// 加载Triangle插件类,路径在polygon_plugins.xml中定义
boost::shared_ptr<polygon_base::RegularPolygon> triangle = poly_loader.createInstance("polygon_plugins::Triangle");
// 初始化边长
triangle->initialize(10.0);
boost::shared_ptr<polygon_base::RegularPolygon> square = poly_loader.createInstance("polygon_plugins::Square");
square->initialize(10.0);
ROS_INFO("Triangle area: %.2f", triangle->area());
ROS_INFO("Square area: %.2f", square->area());
}
catch(pluginlib::PluginlibException& ex)
{
ROS_ERROR("The plugin failed to load for some reason. Error: %s", ex.what());
}
return 0;
}
从上边的代码中我们可以看到,plugin可以在程序中动态加载,成功加载之后就可以调用plugin的接口来实现相应的功能了。
修改CMakefile.txt,添加上边代码的编译规则:
add_executable(polygon_loader src/polygon_loader.cpp)
target_link_libraries(polygon_loader ${catkin_LIBRARIES})
然后编译并运行,可以看到如下结果:

参考链接
https://blog.csdn.net/moyu123456789/article/details/107907196?spm=1001.2014.3001.5501

- 点赞
- 收藏
- 关注作者
评论(0)