点云处理:基于广度优先遍历的点云聚类算法

前言
广度优先遍历(BFS)算计介绍
广度优先遍历(BFS)和深度优先遍历(DFS)同属于两种经典的图遍历算法
广度优先遍历算法:首先从某个节点出发,一层一层的遍历,下一层必须等到上一层节点全部遍历完之后才会开始遍历
基本思想:尽最大程度辐射能够覆盖的节点,并对其进行访问。
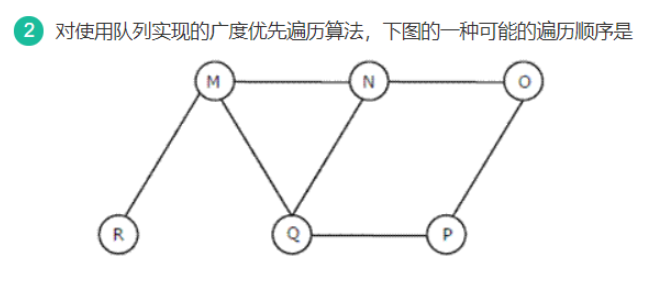
用一道BFS的题来进行举例
-
以M节点为顶点的话
则遍历顺序为:MNQP或MNPQ或MQNP或MQPN或MPQN或MPNQ -
以N节点为顶点的话
遍历顺序为:NMOQ或NMQO或NOQM或NOMQ或NQOM或NQMO -
以Q节点为顶点的话
遍历顺序为:QMNPR
进行BFS算法实现的时候都是以一个队列的形式进行
下面举一个节点多些的例子,以队列的形式更好理解算法是如何进行的
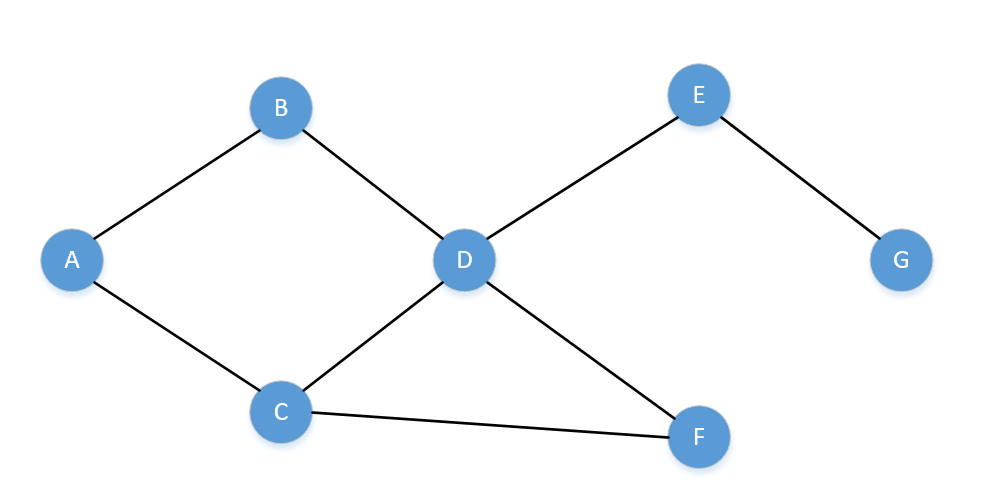
这是一个无向图,即用线连的两个节点均个互相到达对方,例如A可以到B,B也可以到A
以A为顶点,以队列的形式,走下BFS算法的流程如下:
- 第一个节点是A,先将A 入队列。当前队列为:A
- 从队列中取出A,通过A找到两个节点分是 B 和 C,将它俩如队列。当前队列为:BC
- 从队列中取出B,通过B可以找到A和D,A访问过,忽略,将D入队列。当前队列为:CD
- 从队列中取出C,通过C可以找到A、D、F,A和D访问过,忽略,将F入队列。当前队列为:DF
- 从队列中取出D,通过D可以找到BCEF,BCF已访问,忽略,将E入队列。当前队列为:FE
- 从队列中取出F,通过F可以找到CD,CD已访问,忽略,没有可以加入队列的。当前队列为:E
- 从队列中取出E,通过E可以找到DG,D已访问,忽略,G加入队列。当前队列为:G
- 从队列中取出G,通过G可以找到E,E已访问,忽略,没有可以加入队列的。当前队列为:空
- 判断队列为空,广度优先遍历结束。
所以上面图,访问的顺序为:ABCDFEG
基于BFS的点云聚类和外点剔除
点云聚类就是把空间上距离相近的点,作为一个集合,打上要给标签
集合中点数过少的集合,认为是杂点,需要剔除,在特征提取的时候不考虑这些点。
点云的聚类的方式就是基于广度优先遍历算法(BFS)
BFS算法适用于图数据结构,为了把单帧激光雷达点云运用上BFS算法,首先需要将其建模成一个图模型。
一帧点云建立图模型方法:
将一帧点云投影到一个平面地图上,比如velodyne-16的激光雷达(有16根线,每个线有1800个点),将其投影到16*1800大小的图上。
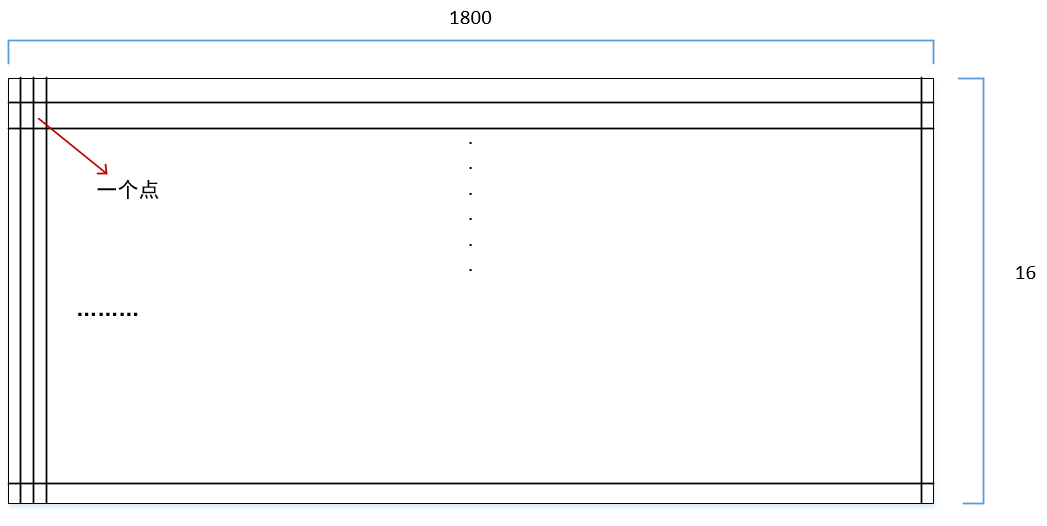
一个格子就代表一个点,格子里的值就是物体到雷达中心的距离
现在图有了,就该定义顶点和边了。
顶点:激光雷达一帧里面的每个点都作为一个顶点
边:一个点的上下左右,的点的连线,作为边,该点的上下左右也就是其邻接点
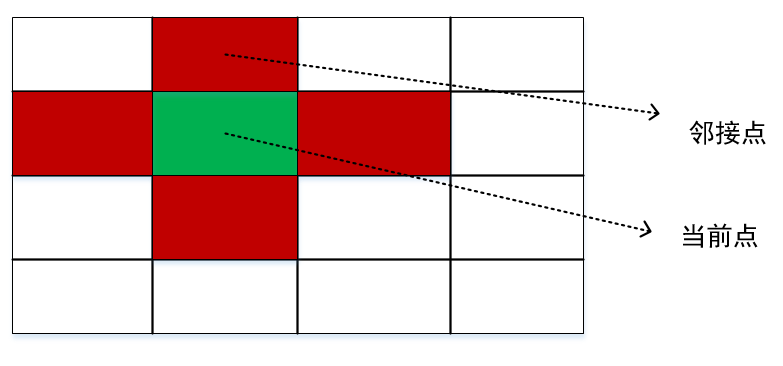
由于机械室激光雷达水平方向上是360°的,所以左右边界和另一个也构成邻接点。但是垂直方向上不连续的,所以不能把上下边界作为邻接点。
根据BFS算法,遍历可以从任意一个有效的点开始,至到所有的点都被遍历到
基于BFS的点云聚类方法:
如果没有被处理说明这是一个新的聚类,然后执行BFS的步骤
将队列里的首个元素弹出,然后将该元素近邻塞入队列末尾,在代码中为了执行效率,没有使用std::queue,使用的是普通数组,用双指针实现的一个队列的加入和弹出。
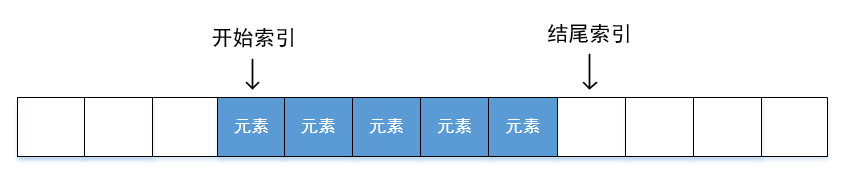
元素近邻就是上面建立的图模型的上下左右
聚类判别原理—通过一个角度判断
没有通过距离判断的原因,就是应为水平角度分辨率和垂直角度分辨率差别很大。所以水平方向和垂直方向的近邻点的距离会小很多。
要判断的角度如下图所示,该角度越大,说明离得越近,角度越小,说明离得越远
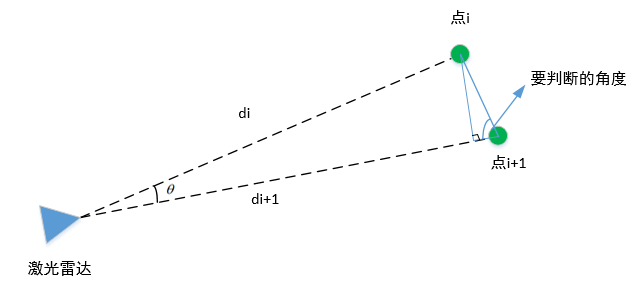
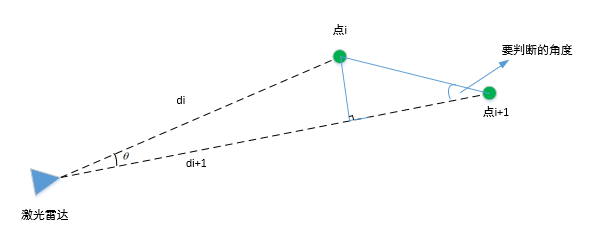
图中的,di和di+1与角度塞塔,是已知的,可以直接求得要判断的角度

- 点赞
- 收藏
- 关注作者
评论(0)