ROS人机交互软件

【摘要】 前言在使用ROS的过程中,我们常常需要使用复杂的编译源代码和相关的解析操作,才能单独对某一个任务进行启动。在修改时,也需要单独打开某个文件、编辑、保存,这个过程比较繁琐。这些数据信息均需要在终端中以字符的方式显示出来,键入命令同样需要在终端中输入字符命令,如果是用于较大的ROS工程,总不能所有调试工作,每改动一下参数都键入字符命令吧。为此人机交互界面氤氲而生,使用按钮,输入框等控件简化这...
前言
在使用ROS的过程中,我们常常需要使用复杂的编译源代码和相关的解析操作,才能单独对某一个任务进行启动。在修改时,也需要单独打开某个文件、编辑、保存,这个过程比较繁琐。这些数据信息均需要在终端中以字符的方式显示出来,键入命令同样需要在终端中输入字符命令,如果是用于较大的ROS工程,总不能所有调试工作,每改动一下参数都键入字符命令吧。为此人机交互界面氤氲而生,使用按钮,输入框等控件简化这一过程,并且使调试过程更加清晰明确,下方是一个人机交互界面的结构图:

![]()
整个软件被分为6个界面,主要部分为设置界面、建图导航界面、键盘控制界面、单点导航界面、巡航模式界面这六个界面。其中建图导航包含rviz组件,具备显示功能。整个软件还具备保存设置功能,只需第一次开机设置。下面我们对该界面以及运行流程进行详细介绍,并给出一系列较为实用的人机交互软件。
界面介绍
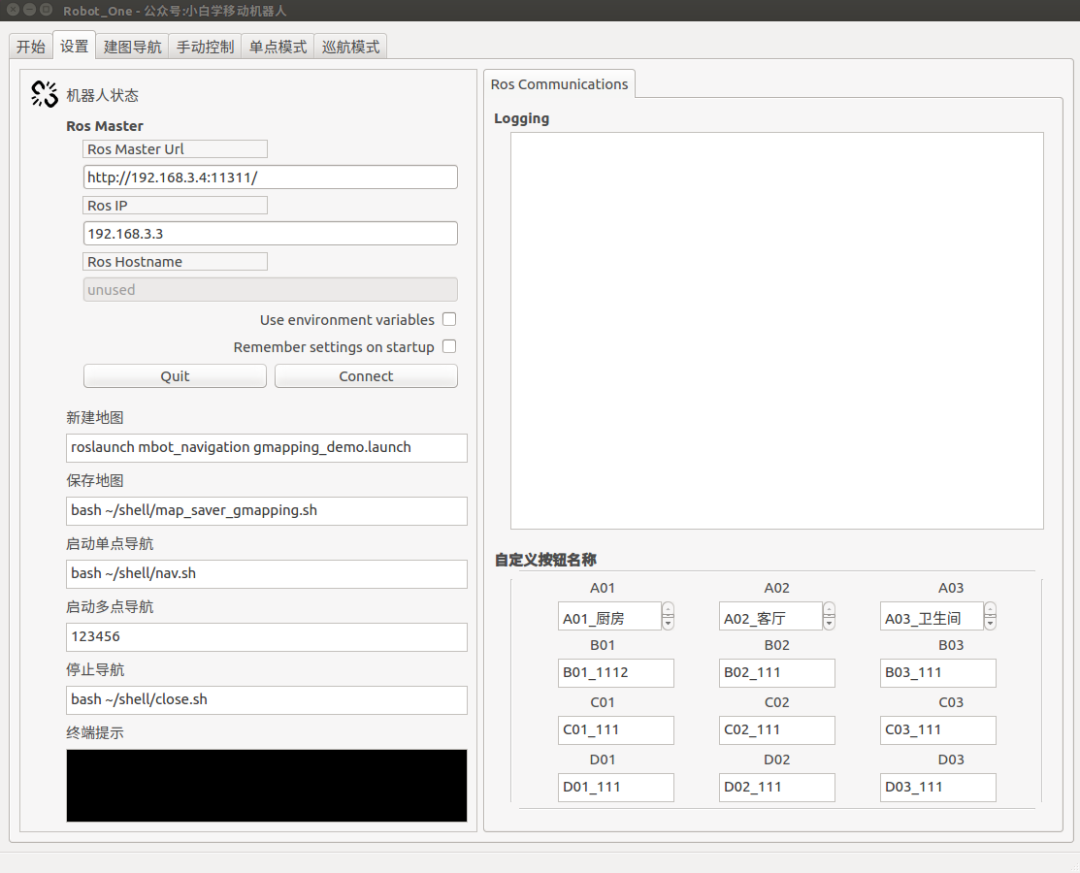
设置页面
设置界面,主要包括连接ros master,通过输入主机IP和从机IP来对机器人进行连接、设置启动功能按钮命令、自定义单点导航按钮名称、显示调试信息等模块。具体如下图所示:
![]()
.........详情请参考

【声明】本内容来自华为云开发者社区博主,不代表华为云及华为云开发者社区的观点和立场。转载时必须标注文章的来源(华为云社区)、文章链接、文章作者等基本信息,否则作者和本社区有权追究责任。如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)