3D激光SLAM:LeGO-LOAM论文解读---完整篇

论文的标题是:LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
- 标题给出的应用场景是 可变地形
- 重点是 轻量级 并 利用 地面优化
- 本质依然是一个 激光雷达里程计和建图
摘要部分
文章提出了一种轻量级、基于地面优化的激光里程计和建图算法LeGo-Loam,能够实时的进行六自由度位姿估计,应用在地面的车辆上面。
强调应用在车辆上面就是因为在应用该算法的时候,雷达必须水平安装(主要设计地面优化部分),像LOAM和LIO-SAM的话对于安装角点是没有要求的,并且在运行过程中角度也可以改变。
LeGo-Loam是一套轻量级的算法,可以在低功耗嵌入式系统中进行实时的位姿估计。LOAM的实时性是要求在x86性能比较好的平台的上进行,LeGo-Loam在算力下降的平台上依然可以实时进行
该算法基于地面优化,在分割和优化的过程中利用地面的存在
首先进行点云分类,并利用分类去除了一部分噪声点,通过特征提取获得面点和角点(这部分和LOAM一样)
通过两步的LM优化方法,利用角点和面点,进行相邻帧的位姿计算。—前端部分
用地面小车在可变地形上采集的数据,和LOAM进行比较,LeGO-LOAM在降低计算量的同时达到了相似或更好的精度。
把LeGO-LOAM集成到一个SLAM的框架里面去,用关键帧的概念对后端进行一个管理,来消除累计误差,用回环检测的方法(LOAM没有的部分)—后端部分。
简介部分
技术背景:
地图构建和状态估计是智能机器人中很重要的一个功能
有很多人对此付出了很多努力,通过两种方法:
- 基于视觉
- 基于激光雷达
视觉SLAM的优势可以很好的进行回环检测,但是对光照和视角的变换很敏感
激光SLAM的优势是可以在晚上依然可用,并且可以得到高精度的测量
因此论文用3d激光雷达进行实时的SLAM
传统的求解相邻两帧位姿的方式就是通过迭代最近邻点的方式(ICP),当场景非常大时,包含很多的点,那么ICP方法会非常耗时。针对ICP有几种升级的方法,将点与局部平面进行匹配,面到地图的匹配,并利用并行计算,使效率得到提升。
后面继续介绍了些点云配准的算法
LOAM的优势
LOAM是一种低漂移并且实时的激光雷达里程计和建图的方法
LOAM是通过提取角点和面点建立约束,来求取帧间的位姿变换。特征点是通过计算点的曲率进行判断的
LOAM的实时性是通过将估计问题分成了两个独立的算法进行,一种算法以高频运行,低精度估计传感器运动。另一种算法运行频率较低,但返回高精确运动估计。
在KITTI数据集上,仅通过激光雷达的估计,LOAM的精度是最好的。
LOAM的问题
指出LOAM在该工作场景中的问题
工作场景描述:
该工作场景是在地面的小车上装一个3D的激光雷达,来获得实时可靠的6自由度位姿估计。并且将算法部署到小规模的嵌入式系统中。
问题:
-
1 计算量的问题
许多无人机驾驶的车辆上无法安装强大的计算单元 -
2 运动激烈时候的问题
当小车在多种场景下跑的时候,由于颠簸,运动并不是十分平滑,导致数据有运动畸变。(LOAM是通过匀速模型进行的畸变去除,此时不再适用)由于运动强烈也会导致联系两帧的特征点匹配出现异常。
另外,大量的激光点云对于低功耗的嵌入式平台很难达到实时性
当把LOAM直接用到上面的场景上,当UGV运动比较平稳,并且特征稳定,计算资源足够的时候,可以实现低漂移的运动估计
但是资源受到限制,LOAM的表现就会退化。在场景点云比较多的时候,要计算每个点的曲率是比较耗时的,低算力的平台上计算就跟不上了
- 3 噪点的问题
UGV 的运行环境有很多的噪点。如果雷达和地面比较近,那么地面上的噪声也会影响LOAM的表现
比如在草地上跑,可能会把草提取成角点,这样很难再找到匹配对。树叶是不是稳定的特征点
提出LeGO-LOAM的解决办法
因此提出了一种轻量的,通过地面优化的的LOAM(LeGO-LOAM)
点云的分类是通过先地面分割后,之后去除不可靠的特征点(解决噪点问题)
由于是基于地面的优化,LeGO-LOAM通过两步的优化来进行位姿的估计。(解决轻量化问题)
第一步,通过从地面点中提取面点,然后进行z roll pitch 的估计(不估计 x y yaw)
第二步,通过角点来进行 x y yaw的估计
并且集成了回环优化来修正位姿漂移。
硬件系统
论文的框架由两种激光雷达的数据进行的测
激光雷达
-
1 VLP-16:
测量范围最远100米,精度为±3厘米
30°(±15°)的垂直视场(FOV)和360°的水平FOV
16通道传感器提供2°的垂直角分辨率
水平角分辨根据旋转速率不同,从0.1°到0.4°变化
10Hz的扫描速率,水平角分辨率为0.2° -
2 HDL-64E
60°的水平FOV
48个通道
垂直FOV为26.9°
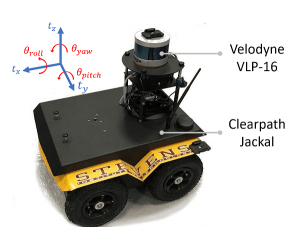
移动车辆
使用的UGV是Clearpath Jackal
锂电池供电
最大速度为2.0米/秒,最大有效载荷为20千克
集成低成本惯性测量单元(IMU),型号为CH Robotics UM6
如下图所示
计算单元
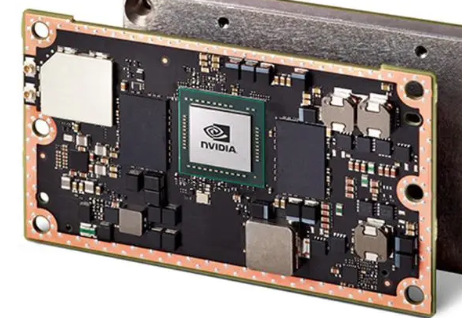
计算单元进行验证的有两个
- 1 嵌入式计算设备 Nvidia Jetson TX2
Jetson TX2是一款嵌入式计算设备,配备ARM Cortex-A57 CPU。
- 2 台式计算机 2.5GHz i7-4710MQ
电脑CPU以与LOAM中使用的计算硬件相同
轻量级激光雷达里程计和建图方法
系统框架
整体框架如下:
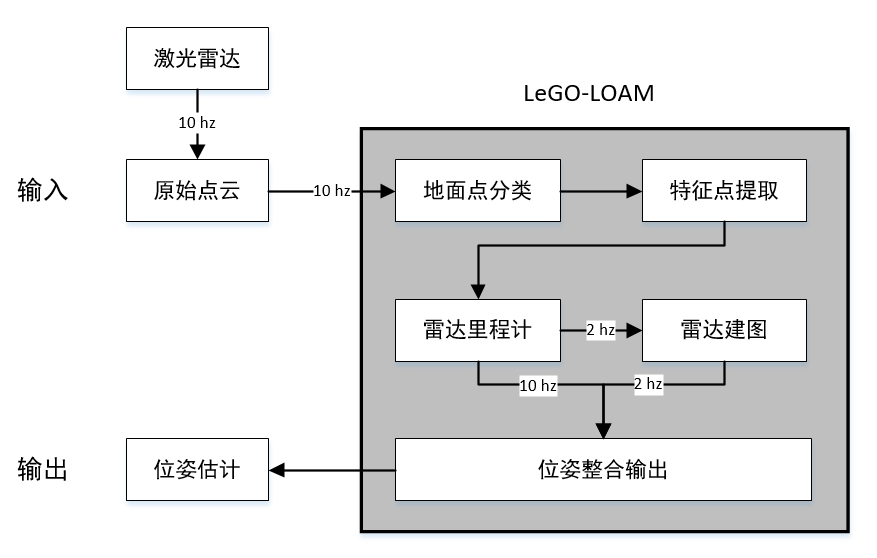
- 输入:三维激光点云
- 输出:六自由度位姿估计
整个系统可以分为五个模块:
- 分割:指获取单次扫描的点云,并将其投影到距离图像上进行分割。161800个点用cvmat来对点进行初步管理*
- 特征提取:分割的点云被发送到特征提取模块。
- 激光雷达里程计:使用从先前模块中提取的特征点进行帧间位姿估计
- 激光建图部分:这些特征在激光建图部分被转换到全局点云地图中进一步处理。
- 变换集成模块:融合来自激光雷达里程计和激光雷达建图的姿态估计结果,并输出最终的姿态估计。以里程计高频率输出精确位姿
相对于LOAM中的原始通用框架,该系统旨在提高地面车辆的效率和精度。
点云分割
分割方法:
Pt是t时刻的一帧点云数据

pi是Pt中的一个点
首先需要把Pt映射到深度图像上去
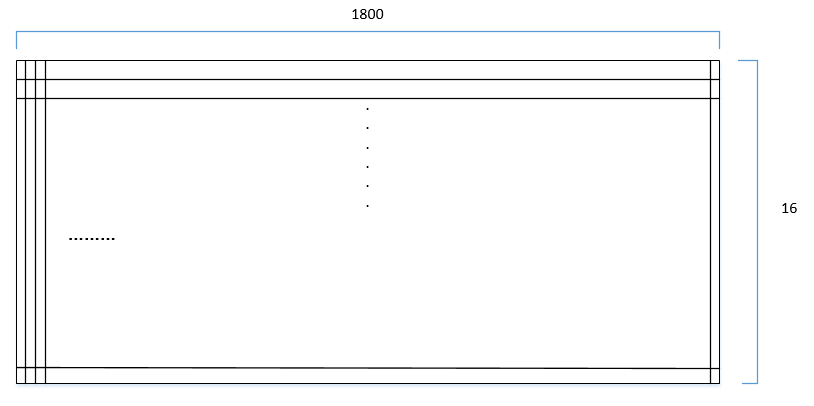
映射的深度图像的分辨率是 1800*16 .1800就是一帧激光雷达点云里面的每一个scan上有1800个点,16就是有16个scan
VLP的水平分辨率为0.2° 垂直分辨率为2°
每个有效的点为深度图像的一个像素,像素的值就是该点到雷达中心的距离
就相当于:

地面点分类
由于在场景中可能是在斜坡上面进行运动,所以没有假设地面点是一个水平面
通过深度图像的每一列进行地面点的提取,然后再做点云的分类。
在后面的点云分类中,地面点就不参与了,因为它已经分完了
其它点分类及过滤
之后基于图像的分割方法,将点云分成很多簇
同一簇的点分配上唯一的标签
地面点是一种特殊类型的簇
对点云进行聚类分割可以提高处理效率和特征提取精度
假设机器人在一个噪声很大的环境下,有些物体的尺寸很小比如树叶,或者其它不可靠的特征点。相邻帧几乎不可能看到同一个树叶
所以做好先去掉这些点
为了实现快速和可靠的特征提取,把小于30个点的聚类进行过滤,即不会在这些点中进行特征提取
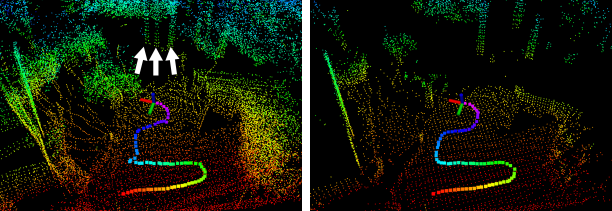
测试
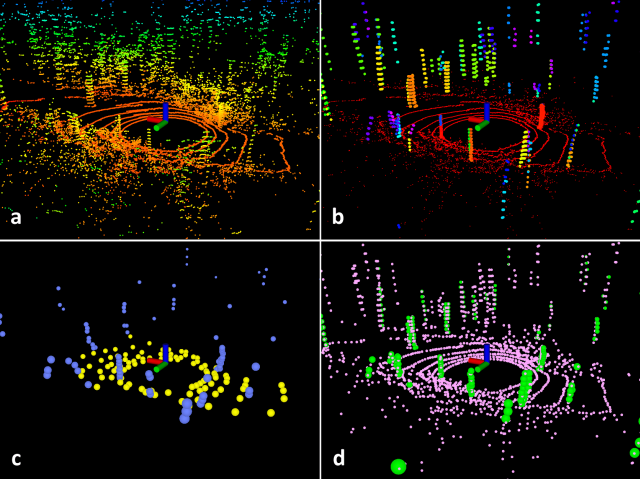
其可视化的效果 如下
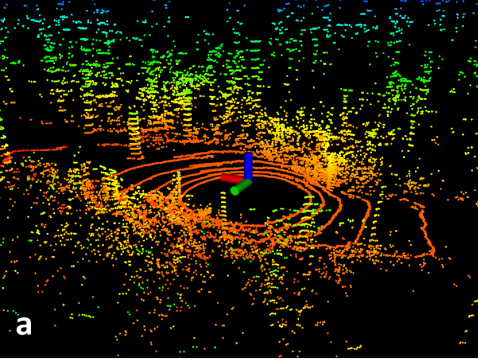
a图是原始的点云可视化效果
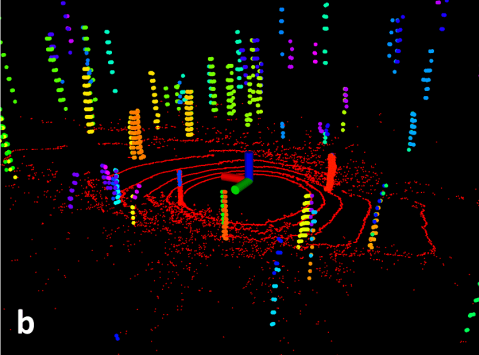
做完聚类之后,去除聚类小于30的点后保留的点,红色的点是地面点
在聚类之后剩下的点,代表比较大的目标,比如建筑物、树干、地面点,可以用这些点做里程计的位姿估计
同时这些点会被存储到深度图像中去,过滤的点则会被深度图像删去。
保留的点会存储三种属性
- 是否是地面点的标签
- 在深度图像的行列索引
- 距离,点到雷达中心的距离
然后利用这些信息再做特征提取
特征提取
这一部分和LOAM差不多
区别是 LeGO-LOAM 不是从原始点云中提取特征,而是从地面点和分割点中提取特征。
先算一个曲率

这个曲率和一个阈值比较
大于阈值就是角点,小于阈值就是面点
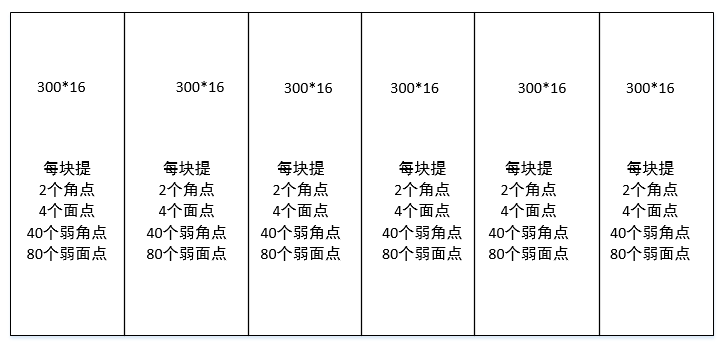
和LOAM一样,也把每个scan分成6段子图
那每个子图就是
300*16的点
在每个子图中选取
- 角点 2 个
- 面点4个
- 弱角点 40个
- 弱面点 80个

激光雷达里程计
激光雷达里程计模块的功能就是:估计相邻帧之间的位姿变换。
估计的方式:在相邻帧之间做点到线的约束和点到面的约束
具体的方式和LOAM一样
针对LOAM的改进
-
1 基于标签的匹配
在特征提取部分提取的特征点都会有个标签(在点云分割时分配的)
因此在找对应点时,标签必须一致
对于面点仅在上一帧中找地面点与之匹配
对于角点在上一帧对于的标签中找对应得角点
这种特征点匹配得方式会提高匹配精度 -
2 两步LM优化
首先做地面点得优化,再做角点得优化。该方法实现了相邻帧间得位姿估计
具体两步LM优化方法如下:
(1)第一步通过当前帧地面点和上一帧匹配得地面点估计出 z roll pitch
(2)第二步通过当前帧角点和上一帧匹配得角点估计出 x y yaw,并利用第一步估计得 z roll pitch
虽然在第一步就可以估计出x y yaw,但是其精度步高,不能用于第二步得估计
最后把两步估计得结果加起来,就是6自由度得位姿变换结果
优化方法意义:通过这种方式得优化,计算时间相比于原始LOAM可以减少35%。
激光雷达建图
原理和LOAM一样:当前帧和地图进行低频率得配准,得到最优得当前帧位姿变换
和原始LOAM不一样地方: 地图得存储。
LOAM是通过一个栅格地图进行局部地图得管理。
LeGO-LOAM是通过关键帧得概念进行局部地图管理,保存了激光雷达一些帧,和该帧的位姿。
局部地图建立就是通过根据当前帧的位置,提取与当前帧位置小于100m的关键帧拼接(根据每帧的位姿拼接)在一起作为局部地图
进行回环检测集成位姿图优化:
最后将SLAM里面的位姿图优化集成到了LeGO-LOAM中
- 回环检测的方法:就是通过检测历史帧的位姿和当前帧的位姿比较接近,则认为形成一个回环。(因为激光雷达里程计在短时间内的漂移比较小)
- 优化的方法就是通过ICP计算历史帧和当前帧的位姿变换,然后通过LM的优化方法就行 GT-SAM的位姿图优化。
实验对比
户外小场景下

户外的小场景,其中
i是一个树
ii 石头墙
iii UGV
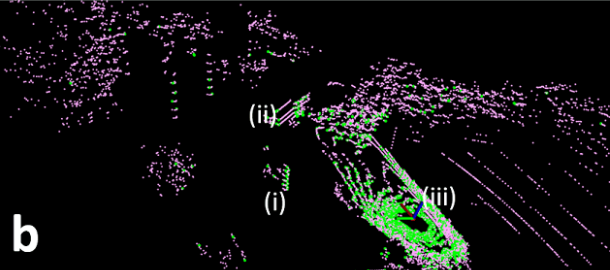
LOAM把一些树叶提取成了面点,这种面点很不稳定
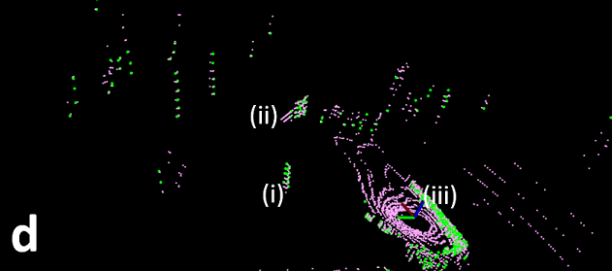
LeGO-LOAM通过距离滤波的方式把树叶去除了
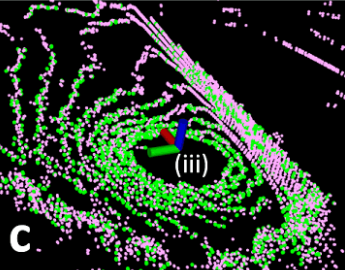
LOAM把草地上的草提取成了角点,这种角点也不稳定

LeGO-LOAM不提取地面上的角点
所以LeGO-LOAM提取的特征点相比于LOAM更加稳定
最后形成的地图LOAM中杂点多,且一个树形成了3个数,
LeGO-LOAM效果更好些
户外大场景
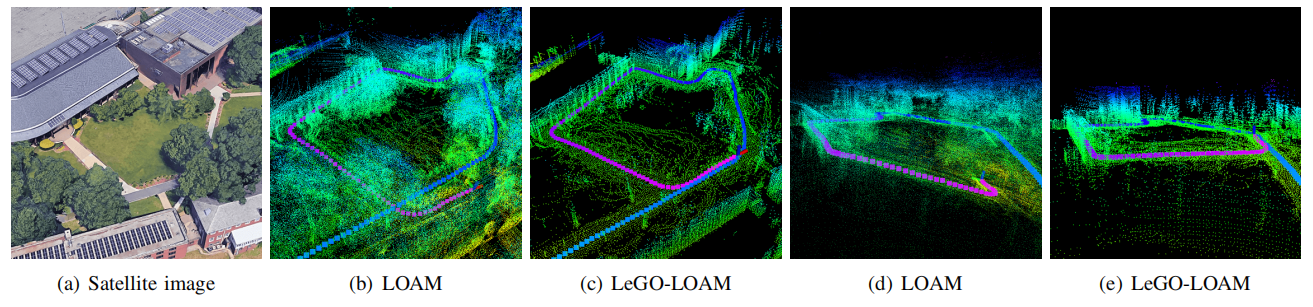
在大范围场景下,LOAM的杂点要多些
文章来源: blog.csdn.net,作者:月照银海似蛟龙,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/qq_32761549/article/details/125995841

- 点赞
- 收藏
- 关注作者
评论(0)