3D激光SLAM:LeGO-LOAM论文解读---点云分割部分

【摘要】
3D激光SLAM:LeGO-LOAM论文解读---点云分割部分
点云分割地面点分类其它点分类及过滤测试
原文
点云分割
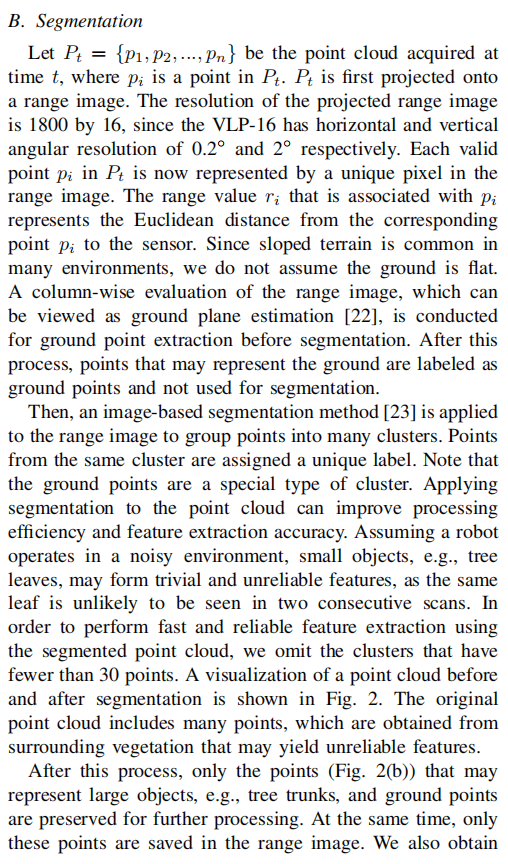
分割方法: Pt是t时刻的一帧点云数据 pi是Pt中的一个点 ...
点云分割
分割方法:
Pt是t时刻的一帧点云数据

pi是Pt中的一个点
首先需要把Pt映射到深度图像上去
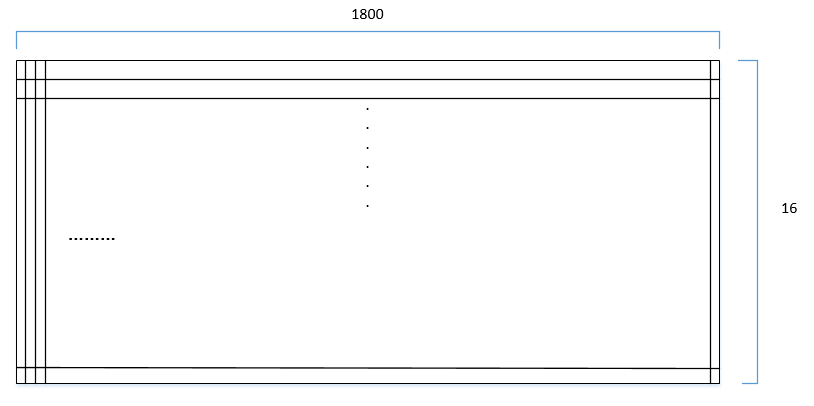
映射的深度图像的分辨率是 1800*16 .1800就是一帧激光雷达点云里面的每一个scan上有1800个点,16就是有16个scan
VLP的水平分辨率为0.2° 垂直分辨率为2°
每个有效的点为深度图像的一个像素,像素的值就是该点到雷达中心的距离
就相当于:

地面点分类
由于在场景中可能是在斜坡上面进行运动,所以没有假设地面点是一个水平面
通过深度图像的每一列进行地面点的提取,然后再做点云的分类。
在后面的点云分类中,地面点就不参与了,因为它已经分完了
其它点分类及过滤
之后基于图像的分割方法,将点云分成很多簇
同一簇的点分配上唯一的标签
地面点是一种特殊类型的簇
对点云进行聚类分割可以提高处理效率和特征提取精度
假设机器人在一个噪声很大的环境下,有些物体的尺寸很小比如树叶,或者其它不可靠的特征点。相邻帧几乎不可能看到同一个树叶
所以做好先去掉这些点
为了实现快速和可靠的特征提取,把小于30个点的聚类进行过滤,即不会在这些点中进行特征提取
测试
其可视化的效果 如下
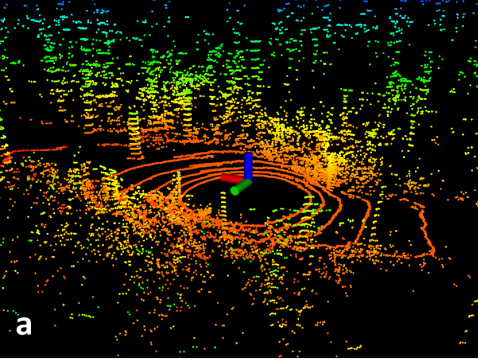
a图是原始的点云可视化效果
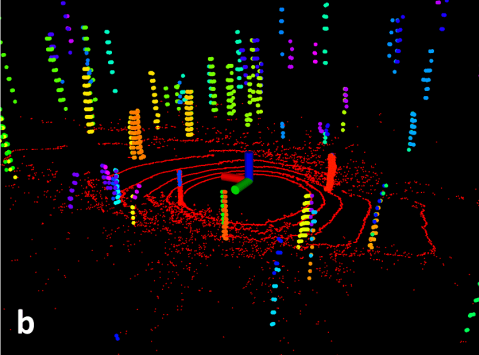
做完聚类之后,去除聚类小于30的点后保留的点,红色的点是地面点
在聚类之后剩下的点,代表比较大的目标,比如建筑物、树干、地面点,可以用这些点做里程计的位姿估计
同时这些点会被存储到深度图像中去,过滤的点则会被深度图像删去。
保留的点会存储三种属性
- 是否是地面点的标签
- 在深度图像的行列索引
- 距离,点到雷达中心的距离
然后利用这些信息再做特征提取
原文

文章来源: blog.csdn.net,作者:月照银海似蛟龙,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/qq_32761549/article/details/126028982

【版权声明】本文为华为云社区用户转载文章,如果您发现本社区中有涉嫌抄袭的内容,欢迎发送邮件进行举报,并提供相关证据,一经查实,本社区将立刻删除涉嫌侵权内容,举报邮箱:
cloudbbs@huaweicloud.com
- 点赞
- 收藏
- 关注作者
评论(0)