3D激光SLAM:ALOAM中KITTI数据集处理--转换成ROS可用数据 代码解析

3D激光SLAM:ALOAM中KITTI数据集处理--转换成ROS可用数据
前言
KITTI数据集由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。该数据集用于评测立体图像(stereo),光流(optical flow),视觉测距(visual odometry),3D物体检测(object detection)和3D跟踪(tracking)等计算机视觉技术在车载环境下的性能。KITTI包含市区、乡村和高速公路等场景采集的真实图像数据,每张图像中最多达15辆车和30个行人,还有各种程度的遮挡与截断。整个数据集由389对立体图像和光流图,39.2 km视觉测距序列以及超过200k 3D标注物体的图像组成,以10Hz的频率采样及同步。总体上看,原始数据集被分类为’Road’, ’City’, ’Residential’, ’Campus’ 和 ’Person’。对于3D物体检测,label细分为car, van, truck, pedestrian, pedestrian(sitting), cyclist, tram以及misc组成。
通过该数据集可以验证自己的算法
但是获取数据后,需要将数据进行一个转换,转成ROS 的 Topic 或者 rosbag,否则没法使用.
例如图片是png格式的,lidar的数据是bin文件形式的.
本篇详解 如何通过 代码 来实现 kitti数据集的处理
KITTI数据集文件结构
kitti 数据集的文件结构,注意这个和程序里面的路径设置有关,不一致则读不到数据
—kitti_data
------sequence
---------00
------------image_0
------------------000000.png
------------------000001.png
------------------000002.png
------------image_1
------------------000000.png
------------------000001.png
------------------000002.png
------------calib.txt
------------times.txt
------velodye
---------sequence
------------00
---------------velodye
------------------000000.bin
------------------000001.bin
------------------000002.bin
Code
下面的代码实现了读取kitti数据集的 图像\雷达\时间戳 并发布topic和保存bag
//
#include <iostream>
#include <fstream>
#include <iterator>
#include <string>
#include <vector>
#include <opencv2/opencv.hpp> //处理图像用的
#include <image_transport/image_transport.h> //opencv图像和ros图像的转换
#include <opencv2/highgui/highgui.hpp>
#include <nav_msgs/Odometry.h>
#include <nav_msgs/Path.h>
#include <ros/ros.h>
#include <rosbag/bag.h>
#include <geometry_msgs/PoseStamped.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/image_encodings.h>
#include <eigen3/Eigen/Dense>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
要包含的头文件 主要是 字节流的读入 消息 的处理等
//
int main(int argc, char** argv)
{
//初始化节点
ros::init(argc, argv, "kitti_helper");
// ~ 发布的topic 会 以 节点名字+话题名字 发布
ros::NodeHandle n("~");
- 1
- 2
- 3
- 4
- 5
- 6
初始化节点
//
// 声明字符串 相关的参数设置 在launch中设置的 数据的路径 数据的sequence 输出的bag路径
std::string dataset_folder, sequence_number, output_bag_file;
//从参数服务器获取 数据路径
n.getParam("dataset_folder", dataset_folder);
//从参数服务器获取 数据的sequence
n.getParam("sequence_number", sequence_number);
//打印 kitti数据 的信息
std::cout << "Reading sequence " << sequence_number << " from " << dataset_folder << '\n';
// 声明 变量 是否需要 生成bag
bool to_bag;
//从参数服务器获取 是否需要 生成bag
n.getParam("to_bag", to_bag);
//如果生成bag
if (to_bag)
n.getParam("output_bag_file", output_bag_file);//从参数服务器获取
//声明 变量 发布延时
int publish_delay;
//从参数服务器获取 发布延时
n.getParam("publish_delay", publish_delay);
//如果小于0 则 设置为1
publish_delay = publish_delay <= 0 ? 1 : publish_delay;
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
从参数服务器中 读取 对应的 信息 注意 参数 服务器 的设置 在 launch 文件中
<launch>
<node name="kittiHelper" pkg="aloam_velodyne" type="kittiHelper" output="screen"> <!-- 要启动的节点 -->
<param name="dataset_folder" type="string" value="/data/KITTI/odometry/" /> <!-- 数据的路径 -->
<param name="sequence_number" type="string" value="00" /> <!-- 数据的sequence -->
<param name="to_bag" type="bool" value="false" /> <!-- 是否保存bag文件 -->
<param name="output_bag_file" type="string" value="/tmp/kitti.bag" /> <!-- bag的输出路径 -->
<param name="publish_delay" type="int" value="1" /><!-- topic发布的延时 -->
</node>
</launch>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
程序从参数服务器中读取的参数都是从 launch文件中设置的 需要设置的已注释
//
//lidar 的点云 发布句柄
ros::Publisher pub_laser_cloud = n.advertise<sensor_msgs::PointCloud2>("/velodyne_points", 2);
//图像 的 发布句柄
image_transport::ImageTransport it(n);
image_transport::Publisher pub_image_left = it.advertise("/image_left", 2);
image_transport::Publisher pub_image_right = it.advertise("/image_right", 2);
//里程计的发布句柄
ros::Publisher pubOdomGT = n.advertise<nav_msgs::Odometry> ("/odometry_gt", 5);
//声明一个 里程计
nav_msgs::Odometry odomGT;
odomGT.header.frame_id = "/camera_init";//赋值里程计的坐标系 父
odomGT.child_frame_id = "/ground_truth";//赋值里程计的坐标系 子
//声明路径的 消息 发布 句柄
ros::Publisher pubPathGT = n.advertise<nav_msgs::Path> ("/path_gt", 5);
nav_msgs::Path pathGT;//声明一个路径变量
pathGT.header.frame_id = "/camera_init";//赋值坐标系
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
声明设置 要通过 ros 发布的topic 句柄
有:点云的\图像的\里程计的\路径的
//
//读取 时间戳的文件
std::string timestamp_path = "sequences/" + sequence_number + "/times.txt";
std::ifstream timestamp_file(dataset_folder + timestamp_path, std::ifstream::in);
- 1
- 2
- 3
读取时间戳的文件
一个时间戳对应一组数据 ,后面的 点云\图像的消息的时间戳则赋值现在设置的 时间戳文件路径
//
//读取 路径的 文件
std::string ground_truth_path = "results/" + sequence_number + ".txt";
std::ifstream ground_truth_file(dataset_folder + ground_truth_path, std::ifstream::in);
- 1
- 2
- 3
设置 path的文件 的 路径
//
//记录 rosbag
rosbag::Bag bag_out;
if (to_bag)
bag_out.open(output_bag_file, rosbag::bagmode::Write);
- 1
- 2
- 3
- 4
根据参数设置 决定 是否 生成 rosbag 文件
//
Eigen::Matrix3d R_transform;//方向设置矩阵 本质上就是一个旋转矩阵
R_transform << 0, 0, 1, -1, 0, 0, 0, -1, 0;//附初值
Eigen::Quaterniond q_transform(R_transform);//旋转矩阵 转为 四元数
- 1
- 2
- 3
设置 方向设置矩阵 本质上就是一个旋转矩阵
位姿传感器的坐标系 方向 和 lidar 图像 的坐标系 方向 不一致
//
std::string line;//声明 读取行数后保存的字符串
std::size_t line_num = 0;//声明读取的行数 控制读取的 图像 lidar 的 数据序号
ros::Rate r(10.0 / publish_delay);//控制发布频率
- 1
- 2
- 3
- 4
声明 读取行数后保存的字符串
声明读取的行数 控制读取的 图像 lidar 的 数据序号
控制发布频率 publish_delay 这个值 从参数服务器中来 也就是 launch中
//
//循环读 时间戳 文件 的 每一行
while (std::getline(timestamp_file, line) && ros::ok())
{
float timestamp = stof(line);//将时间戳从 字符串 转 成 float
- 1
- 2
- 3
- 4
- 5
循环读 时间戳 文件 的 每一行
将时间戳从 字符串 转 成 float
//
std::stringstream left_image_path, right_image_path;//声明 左右图像的路径
//设置 左图片的路径
left_image_path << dataset_folder << "sequences/" + sequence_number + "/image_0/" << std::setfill('0') << std::setw(6) << line_num << ".png";
//通过opencv的方法 读取图片
cv::Mat left_image = cv::imread(left_image_path.str(), CV_LOAD_IMAGE_GRAYSCALE);
//设置 右图片的路径
right_image_path << dataset_folder << "sequences/" + sequence_number + "/image_1/" << std::setfill('0') << std::setw(6) << line_num << ".png";
//通过opencv的方法 读取图片
cv::Mat right_image = cv::imread(left_image_path.str(), CV_LOAD_IMAGE_GRAYSCALE);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
通过opencv的方法 读取图片
//
//读取 ground_truth的一行
std::getline(ground_truth_file, line);
std::stringstream pose_stream(line);
std::string s;
Eigen::Matrix<double, 3, 4> gt_pose;//声明位姿 矩阵 3行4列
for (std::size_t i = 0; i < 3; ++i)
{
for (std::size_t j = 0; j < 4; ++j)
{
std::getline(pose_stream, s, ' ');
gt_pose(i, j) = stof(s);//给位姿矩阵赋值
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
读取 ground_truth的一行
给位姿矩阵赋值
//
Eigen::Quaterniond q_w_i(gt_pose.topLeftCorner<3, 3>());//提取位姿矩阵的角度部分 并转成四元数
Eigen::Quaterniond q = q_transform * q_w_i;//进行 方向的 旋转
q.normalize();//归一化
Eigen::Vector3d t = q_transform * gt_pose.topRightCorner<3, 1>();//提取位姿矩阵的位置部分
- 1
- 2
- 3
- 4
- 5
提取位姿矩阵的角度部分 并转成四元数
提取位姿矩阵的位置部分
//
//赋值里程计的 内容
odomGT.header.stamp = ros::Time().fromSec(timestamp);
odomGT.pose.pose.orientation.x = q.x();
odomGT.pose.pose.orientation.y = q.y();
odomGT.pose.pose.orientation.z = q.z();
odomGT.pose.pose.orientation.w = q.w();
odomGT.pose.pose.position.x = t(0);
odomGT.pose.pose.position.y = t(1);
odomGT.pose.pose.position.z = t(2);
//发布里程计
pubOdomGT.publish(odomGT);
//赋值路径的内容
geometry_msgs::PoseStamped poseGT;
poseGT.header = odomGT.header;
poseGT.pose = odomGT.pose.pose;
pathGT.header.stamp = odomGT.header.stamp;
pathGT.poses.push_back(poseGT);
//发布路径
pubPathGT.publish(pathGT)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
赋值里程计的 内容 发布里程计
赋值路径的内容 发布路径
//
// 读取 lidar 的点云
std::stringstream lidar_data_path; //声明点云路径字符串
//赋值点云的路径
lidar_data_path << dataset_folder << "velodyne/sequences/" + sequence_number + "/velodyne/"
<< std::setfill('0') << std::setw(6) << line_num << ".bin";
std::vector<float> lidar_data = read_lidar_data(lidar_data_path.str());//读取lidar 的数据 以 [x y z i x y z i ....] 存储咋向量中
std::cout << "totally " << lidar_data.size() / 4.0 << " points in this lidar frame \n";//4个元素是一个点 打印一共多少个点
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
读取 lidar 的点云
以 [x y z i x y z i …] 存储咋向量中
//
std::vector<Eigen::Vector3d> lidar_points; //声明雷达点 的位置 向量
std::vector<float> lidar_intensities;//声明雷达点 的 强度 的 向量
pcl::PointCloud<pcl::PointXYZI> laser_cloud; //声明 一个 PCL 的 点云
for (std::size_t i = 0; i < lidar_data.size(); i += 4)//遍历上面读取的那个 lidar数据的向量
{
lidar_points.emplace_back(lidar_data[i], lidar_data[i+1], lidar_data[i+2]);//存入lidar位置
lidar_intensities.push_back(lidar_data[i+3]);//存入lidar 强度
pcl::PointXYZI point; //声明一个PCL的点
//赋值点的 x y z i
point.x = lidar_data[i];
point.y = lidar_data[i + 1];
point.z = lidar_data[i + 2];
point.intensity = lidar_data[i + 3];
laser_cloud.push_back(point);//将点存入点云
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
将lidar 的信息 存入 PCL形式的点云中
//
sensor_msgs::PointCloud2 laser_cloud_msg;//声明一个ros的点云
pcl::toROSMsg(laser_cloud, laser_cloud_msg);//将pcl的点云转成ros的
laser_cloud_msg.header.stamp = ros::Time().fromSec(timestamp);//赋值时间戳
laser_cloud_msg.header.frame_id = "/camera_init";//声明坐标系
pub_laser_cloud.publish(laser_cloud_msg);//发布ros的点云
- 1
- 2
- 3
- 4
- 5
发布ros的点云
//
//将opecv的图像 转成ros的图像
sensor_msgs::ImagePtr image_left_msg = cv_bridge::CvImage(laser_cloud_msg.header, "mono8", left_image).toImageMsg();
sensor_msgs::ImagePtr image_right_msg = cv_bridge::CvImage(laser_cloud_msg.header, "mono8", right_image).toImageMsg();
//发布左右图像
pub_image_left.publish(image_left_msg);
pub_image_right.publish(image_right_msg);
- 1
- 2
- 3
- 4
- 5
- 6
发布ROS的左右图像
//
if (to_bag)//如果发布rosbag 的话
{
//写入 rosbag
bag_out.write("/image_left", ros::Time::now(), image_left_msg);
bag_out.write("/image_right", ros::Time::now(), image_right_msg);
bag_out.write("/velodyne_points", ros::Time::now(), laser_cloud_msg);
bag_out.write("/path_gt", ros::Time::now(), pathGT);
bag_out.write("/odometry_gt", ros::Time::now(), odomGT);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
写入 rosbag
//
line_num ++;//更新行数 也相当于 更新 读取的 文件 序号
r.sleep();//进行延时 控制发布频率
- 1
- 2
更新行数 也相当于 更新 读取的 文件 序号
进行延时 控制发布频率
//
bag_out.close(); // 关闭rosbag
std::cout << "Done \n";
return 0;
}
- 1
- 2
- 3
- 4
关闭rosbag
//
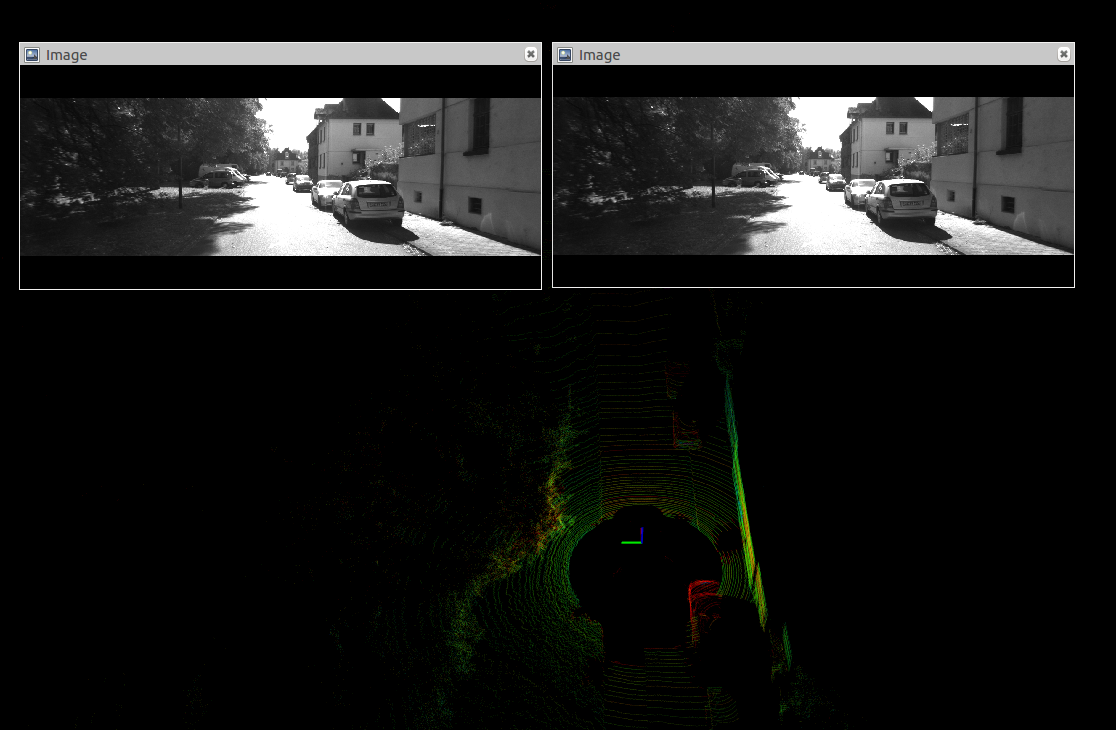
Result
成功的话可以在 rviz里面 播放出 图片和 lidar的点云 信息
文章来源: blog.csdn.net,作者:月照银海似蛟龙,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/qq_32761549/article/details/120322726

- 点赞
- 收藏
- 关注作者
评论(0)