激光SLAM:ICP升级版本NICP(Normal ICP)原理+法向量即曲率计算代码

@[TOC](激光SLAM:ICP升级版本NICP(Normal ICP)原理+法向量即曲率计算代码)
NICP(Normal ICP)匹配方法
传统ICP的缺点:
由于ICP算法在点云的匹配关系上,是计算同一坐标系下的两帧点云上的点的距离最小作为比配点,这样的计算得到匹配关系,经常是错误的,会出现将不同位置(不同物体或者不同物体部分的扫描点)点进行匹配的情况,从而陷入局部最优。
NICP基本思想:
替换原始ICP方法中的对应点匹配(point correspondences)方法;
误差项除了考虑对应点的欧氏距离之外,同时还考虑对应点法向量的角度差。
充分利用实际曲面的特征来对错误的点匹配进行滤除,主要的特征为法向量和曲率;

上图中绿色和蓝色为两次扫描,紫色线表示匹配的点,可以看出,右上角部分虽然蓝色和绿色的点在距离上重合,但是由于法向量不同,并不会建立匹配关系.
NICP点匹配规则:
- 如果没有well define的法向量,则拒绝。
- 两点间的距离大于阈值,则拒绝。
- 两点的曲率之差距大于阈值,则拒绝。
- 两点的法向量角度之差大于阈值,则拒绝。
法向量和曲率计算
该方法需要计算点云中点的法向量和曲率
计算方法如下
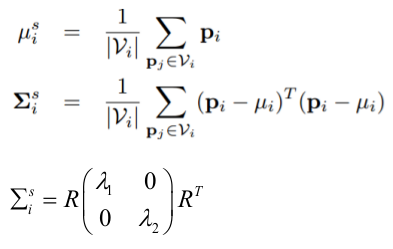
数学模型:
找到点pi周围半径R球形空间内的所有点Vi,然后去中心化,并构造协方差矩阵,公式如下:
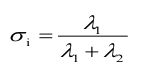
曲率的计算方法:
法向量的计算方法:
最小特征值对应的特征向量
上面是二维的,对于三维的则曲率计算如下:
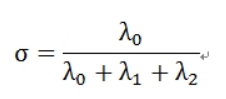
法向量依旧是最小特征值对应的特征向量
参考链接
也可以用pcl的方法求得
目标函数
传统ICP的向量是点的坐标,而NICP将其进行了扩充,即坐标+法向量.
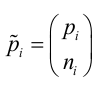
那么变换参数T(R,t)对这个扩充向量的变换则变为:
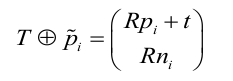
即对点进行旋转+平移,对法向量旋转.
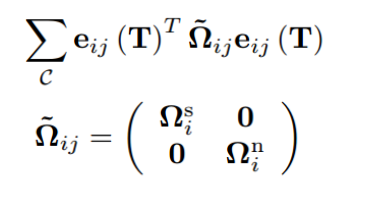
目标函数则是点的距离和法向量角度误差

目标函数的定义为:
二维点云计算法向量方法 Code
通过 Eigen 的方法基于数学模型计算
完整代码
Eigen::Vector2d ComputeNormal(std::vector<Eigen::Vector2d> &nearPoints)
{
Eigen::Vector2d normal;
//根据周围的激光点计算法向量,参考ppt中NICP计算法向量的方法
Eigen::Vector2d average;//周围点的几何中心
average.setZero();//至0
for(auto v : nearPoints)//遍历每个点
{
average += v / nearPoints.size();//求其周围点的几何中心
}
Eigen::Matrix2d covariance;//协方差矩阵
covariance.setZero();//至0
for(auto v : nearPoints)//遍历每个点
{
covariance += (v - average) * (v - average).transpose() / nearPoints.size();//求协方差矩阵
}
Eigen::EigenSolver<Eigen::Matrix2d> eigen_solver(covariance);//转化为对角线矩阵
Eigen::Vector2d eigenValues = eigen_solver.pseudoEigenvalueMatrix().diagonal();
Eigen::Matrix2d eigenVectors = eigen_solver.pseudoEigenvectors();
normal = eigenValues(0) < eigenValues(1) ? eigenVectors.col(0) : eigenVectors.col(1);//计算法向量
return normal;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
代码解释
Eigen::Vector2d ComputeNormal(std::vector<Eigen::Vector2d> &nearPoints)
- 1
函数名称:ComputeNormal
函数功能:计算二维点云某点法向量
函数参数: nearPoints 某个点周围的所有激光点
函数返回: 该点法向量
+++++++++++++++++++++++++++++++++++++++++++++++++++++
Eigen::Vector2d normal;//声明要计算的法向量
Eigen::Vector2d average;//声明周围点的几何中心
average.setZero();//至0
for(auto v : nearPoints)//遍历每个点
{
average += v / nearPoints.size();//求其周围点的几何中心
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
声明要计算的法向量
求其周围点的几何中心
+++++++++++++++++++++++++++++++++++++++++++++++++++++
Eigen::Matrix2d covariance;//声明协方差矩阵
covariance.setZero();//至0
for(auto v : nearPoints)//遍历每个点
{
covariance += (v - average) * (v - average).transpose() / nearPoints.size();//求协方差矩阵
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
求协方差矩阵
就是这个公式

+++++++++++++++++++++++++++++++++++++++++++++++++++++
Eigen::EigenSolver<Eigen::Matrix2d> eigen_solver(covariance);//转化为对角线矩阵
Eigen::Vector2d eigenValues = eigen_solver.pseudoEigenvalueMatrix().diagonal();//提取特征值
Eigen::Matrix2d eigenVectors = eigen_solver.pseudoEigenvectors();//提取特征向量构成的矩阵
- 1
- 2
- 3
将协方差矩阵转为对角线矩阵
提取特征值和特征向量
+++++++++++++++++++++++++++++++++++++++++++++++++++++
normal = eigenValues(0) < eigenValues(1) ? eigenVectors.col(0) : eigenVectors.col(1);//计算法向量 : 最小特征值对应的特征向量
return normal;//返回法向量
- 1
- 2
- 3
通过特征值和特征向量,计算该点法向量
最小特征值对应的特征向量
文章来源: blog.csdn.net,作者:月照银海似蛟龙,版权归原作者所有,如需转载,请联系作者。
原文链接:blog.csdn.net/qq_32761549/article/details/123245580

- 点赞
- 收藏
- 关注作者
评论(0)